
TRON – Testbed for Robotic Optical Navigation


{kind=link}
Motivation
Zukünftige Explorationsmissionen benötigen fortgeschrittene Fähigkeiten wie die einer präzisen und sicheren Landung auf planetaren Körpern oder der Durchführung von Rendezvous und Docking-Operationen. Viele dieser Missionen werden sowohl in der Erd- und Mondumgebung stattfinden, als auch bei weit entfernten Zielen wie dem Mars oder den Eismonden von Jupiter und Saturn. Für eine zuverlässige Operation ist sowohl Autonomie des Raumfahrtzeuges nötig, als auch die Verwendung des Zielkörpers als Navigationsreferenz. Als vielversprechend für die Umsetzung dieses Konzepts gilt die Verwendung von Methoden und Technologien der optischen Navigation. Wenig überraschend muss für diese modernen Ansätze ein deutlich höherer Grad an Details über das Missionsziel an Bord verarbeitet werden. Diese stammen zum einen aus Daten aktueller Kartierungsmissionen, aus denen beispielsweise Kataloge mit georeferenzierten Landmarken abgeleitet werden können. Ergänzt werden solche a priori Informationen mit Messungen die im Verlauf der Mission gemacht werden, sie finden Anwendung zum Beispiel für den Abgleich mit einem an Bord vorhandenen Landmarkenkatalog oder zur Beurteilung der Beschaffenheit des Landegebiets. Aus allen diesen Anwendungen ergibt sich der Bedarf nach deutlich verbesserter Rechenkapazität, nach neuartigen optischen Sensoren und nach komplexen Algorithmen zur Verarbeitung der durch sie gelieferten Daten.
GNC-Systeme, die solche Anforderungen erfüllen, befinden sich im Fokus vieler Entwicklungsprojekte, ein Beispiel dafür ist das DLR-Projekt ATON. Allen Projekten gemein ist der Bedarf intensiver Tests. Zu diesem Zweck wurde TRON entwickelt und implementiert.
TRON-Einführung
TRON ist eine Hardware-in-the-Loop Test (HiLT) Testeinrichtung mit dem Ziel, die Entwicklung und den Test von Technologien für optische Navigation zu unterstützen. Dementsprechend bietet TRON eine Laborumgebung an um Breadboards bis TRL (Technology Readiness Level) 4 zu qualifizieren und Flugmodelle bis zu TRL 6 zu qualifizieren. Typische Hardware, welche in TRON getestet werden kann, sind passive und aktive optische Sensoren wie Kameras oder Flash Lidars.
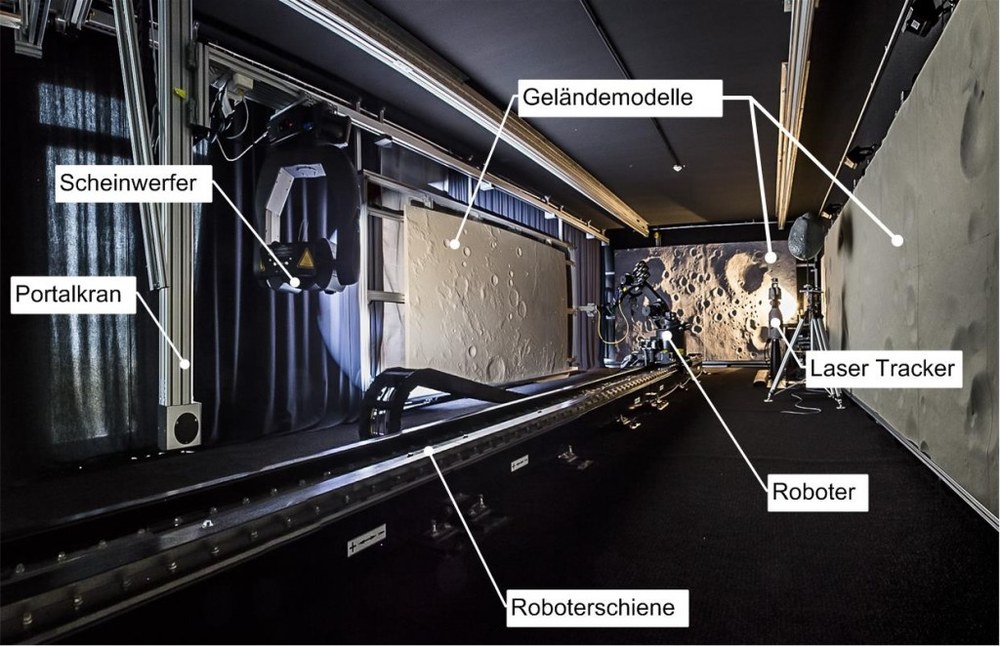
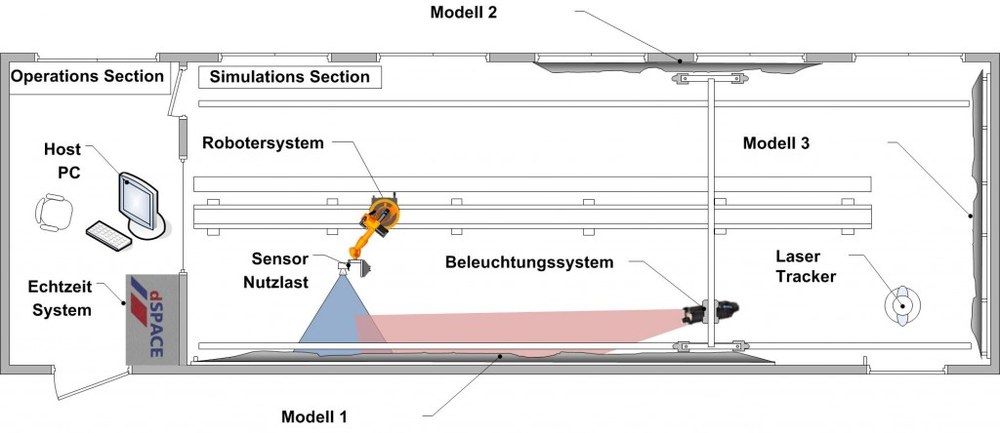
Die Hauptkomponenten des Labors sind ein Roboter für die dynamische Positionierung der zu testenden Hardware, ein dynamisches Beleuchtungssystem, Lasermessgeräte für hochpräzise Refererenzdaten und ein dSPACE-Echtzeitsystem zur Steuerung der Tests und Synchronisierung der Referenzdaten mit den Sensordaten. Unterschiedliche Tests stellen verschiedenen Anforderungen an die Testumgebung. Mit Hilfe von benutzerdefinierten Erweiterungen wie Geländemodellen kann die Laborumgebung entsprechend angepasst werden.
Im aktuellen Ausbau ist TRON mit drei Geländemodellen unterschiedlicher Maßstäbe ausgestattet, die zusammengenommen die Simulation einer vollständigen Mondlandetrajektorie erlauben. Ein solches Szenario beginnt in einem Parkorbit und endet mit dem Abstieg während der letzten ein bis zwei Kilometer zum Landeplatz. Ergänzend steht eine Vielzahl von Körpern mit einfachen Formen zur Verwendung bereit. Für aktive Sensorik wie Flash Lidars ist TRON mit Laserschutzvorhängen ausgestattet, die den Betrieb von Lasern der Klasse 4 erlauben.
Dynamische Positionierung
Die dynamische Positionierung erfolgt durch ein Robotersystem. Seine maximale Nutzlast beträgt etwa 16 kg auf der Roboterhand, ergänzt durch weitere 24 kg verteilbar auf den Roboterarm und die Roboterbasis. Die statische Wiederholgenauigkeit beträgt 0.1 mm, die maximal darstellbare Geschwindigkeit ist etwa 1.5 m/s. Der Roboter kann manuell, über Skripte oder mit Hilfe des dSPACE-Systems über eine Echtzeitschnittstelle gesteuert werden.
Geländemodelle
Momentan sind drei Geländemodelle in TRON installiert.
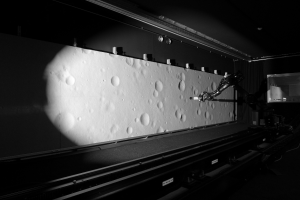
Modell 1 hat eine Größe von 9.80 m x 1.96 m. Seine Dynamik, der Unterschied zwischen dem tiefsten und dem höchsten Punkt im Gelände, beträgt etwa 6.2 cm. Das Modell wurde mit einer Fräsgenauigkeit von 1 mm hergestellt. Die dafür nötigen Referenzdaten wurden mit einer Software generiert, welche Oberflächen repräsentativ für den Mond erstellt. Nach bestimmten Kriterien wie der Verteilung von Kratern ist die Mondoberfläche über einen gewissen Skalenbereich selbstähnlich. Das erlaubt die Anwendung verschiedener Maßstäbe während der Simulationen. Als Beispiel soll eine Simulationsfahrt entlang des Modell 1 dienen, in iesem wird die Entfernung zur Oberfläche zwischen 0.5m und 3m variiert. Bei einem Simulationsmaßstab von 1:10000 erlaubt dies die Darstellung einer Bewegungsdynamik des Raumfahrzeugs von 100 km entlang des Modells und Flughöhen zwischen 5 km und 30 km.
Bisher wurde das Modell für Tests des Breadboards des ESA Lunar Lander Projekts verwendet, sowie für das DLR-Projekt ATON. Beide Projekte arbeiteten mit Maßstäben zwischen 1:10000 und 1:50000 für die Simulation von Abschnitten des Descent Orbits und des Powered Descents.

Modell 2 hat eine Größe von 3.92 m x 1.96 m. Es stellt einen Teil des Mondes im Maßstab von 1:125000 dar, seine Dynamik beträgt 20 cm. Das Modell wurde mit einer Fräsgenauigkeit von 1 mm hergestellt. Die Referenzdaten stammen aus den Messungen der japanischen Kaguya-Mission. Mit diesem Modell können Parkorbits und Teile des Descent Orbits gut simuliert werden. Anders als das Modell 1 besitzt Modell 2 die natürliche Krümmung des Mondes; es wurde bisher für die Simulation von Teilen des Descent Orbits zur Unterstützung der Entwicklung der Kraternavigationssoftware im DLR-Projekt ATON verwendet.
Geländemodell 2 stellt einen Ausschnitt des Mondes im Maßstab von 1:125000 dar. Die reale Größe ist 500 km x 250 km.

Modell 3 hat eine Größe von 4,20 m x 2,20 m, seine Dynamik beträgt 26 cm. Die Referenzdaten des Modells wurden vom DLR hergestellt, indem die Fläche zunächst manuell modelliert und dann in ein digitales Höhenmodell überführt wurde. Anschließend wurde Oberfläche gefräst, von Hand nachbearbeitet, farblich gestaltet und abschließend mit Steinstrukturen versehen. Das Resultat ist ein hoher Detailgrad. Dieses Modell ist optimal für die Simulation der Phase des Anflugs auf den Landeplatz geignet. Bisher wurde es für Kameratests im ATON Projekt und für Flash Lidar Tests in FOSTERNAV verwednet.
Neben der Oberfläche des Mondes ist das Modell auch für andere Anwendungen, z.B. ein Asteroidenszenario geeignet.
Andere Testobjekte
Neben einem lunaren Szenario bietet das TRON Labor weitere Testobjekte, z.B. ein Modell des Asteroiden 433 Eros im Maßstab von 1:34000. Der Asteroid ist um die Hochachse drehbar gelagert.

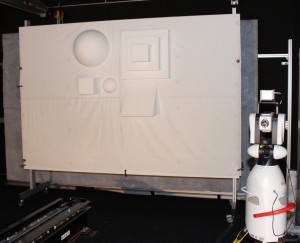
Weiterhin steht eine Fläche von 3 m x 2 m zur Verfügung, die beliebig im Labor platziert werden kann. Zugehörig ist eine Sammlung von Primitivkörpern die auf dieser Fläche installiert werden können. Dieses Testobjekt wurde in verschiedenen Ausstattungen im Projekt FOSTERNAV verwendet.
Optische Umgebung
Die optische Umgebung wird mit Hilfe eines Verdunklungssystems, Materialen zum Vermindern von Reflektionen und mit einem Beleuchtungssystem simuliert.
Das Verdunklungssystem besteht aus im Fensterrahmen eingefassten Vorhängen, welche im geschlossenen Zustand alle Fenster nahtlos verdecken. Reflektionen werden durch schwarze gehaltene Teppiche, Vorhänge und Wände vermindert.
Das Beleuchtungssystem umfasst einen über gesamten Laborbereich bewegbaren Portalkran, auf dem ein in zwei Achsen rotierbarer Scheinwerfer installiert ist. Zusammen mit dem Portalkran bildet die Lampe ein flexibles Beleuchtungssystem mit dessen Hilfe vielfältige Beleuchtungssituationen im Labor dargestellt werden können.
Wesentliche Aktivitäten
- seit 2011: kontinuierliche Forschung im DLR Projekt ATON. Durchführung verschiedener dynamischer Tests mit Überflügen über alle drei Mondmodelle.
- 2017: ESA Projekt CECILE (ESA Vertragsnummer: 4000113067/14/NL/SFe). Bewegung eines Flash Lidars relativ zu einem Zielobjekt.
- 2016 ESA Projekt MILA (ESA Vertragsnummer: 4000112045/14/NUHB). Bewegung eines Flash Lidars relativ zu einem Zielobjekt.
- 2014 EU FP7 ProjeKt SINPLEX. Bewegung eines GNC-Systems relativ zu Mondmodell 3 und zum Eros Asteroidenmodell.
- 2014 EU FP7 Projekt FOSTER²NAV. Bewegung eines GNC-Systems relativ zu einem Zielobjekt.
- 2012 ESA Projekt Lunar lander Phase B1. Bewegung eines Kamera-Sensors relativ zu Mondmodell 1.