In the ALARO project, the Institute of Robotics and Mechatronics will empower the United Robotics Group (URG) as a German technology provider for the challenge of autonomous robotic laboratory automation. In view of the fading pandemic, the technology is evaluated in the context of laboratory tasks that arise in everyday business in hospitals. On the side of the technological problem, the ability of mobile manipulation of known objects in an unknown environment shall be enabled.
The COVID-19 pandemic has shown us that our society is currently almost helpless against a pandemic pathogen without technological measures. Social distancing measures prevent that antidotes and vaccines can be researched in a reasonable time. The CoViPa project of the HGF has shown that mobile laboratory robots are a viable solution to this problem. However, there is currently no product on the market that could be rolled out quickly and on a large scale to provide real help to researchers. In the ALARO project, the knowledge gained from CoViPa by the Institute of Robotics and Mechatronics will be used to qualify the United Robotics Group (URG) as a German technology provider for this challenge. In view of the fading pandemic, the technology is to be evaluated in the context of laboratory tasks that arise in everyday business in hospitals. On the side of the technological problem, the ability of mobile manipulation of known objects in an unknown environment shall be enabled. Here it is important that the development of the hardware (URG) and the development of the software (DLR) are considered as a whole. This is especially important when systems operate in unfamiliar environments where the system faces increased uncertainties in perception that affect motion planning.
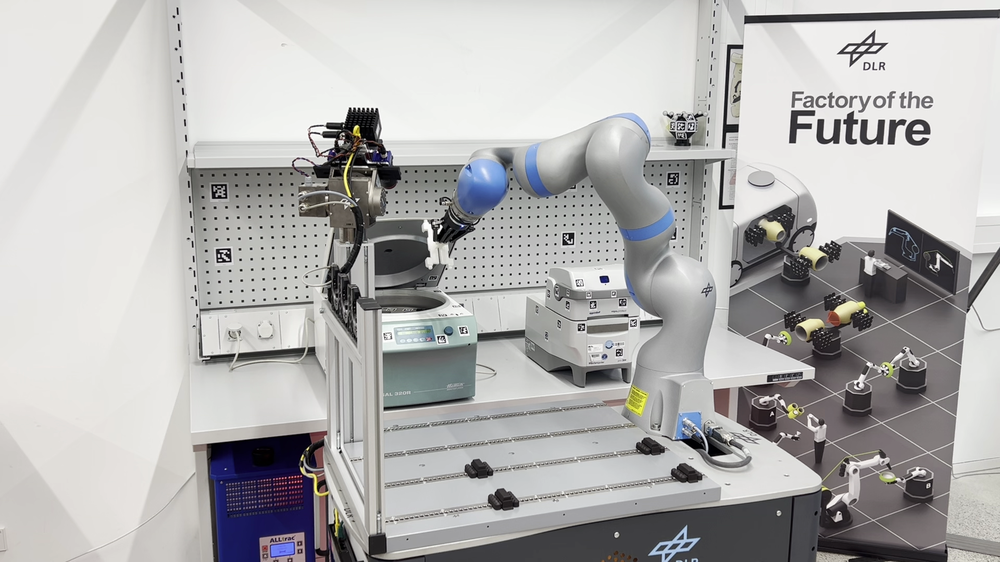
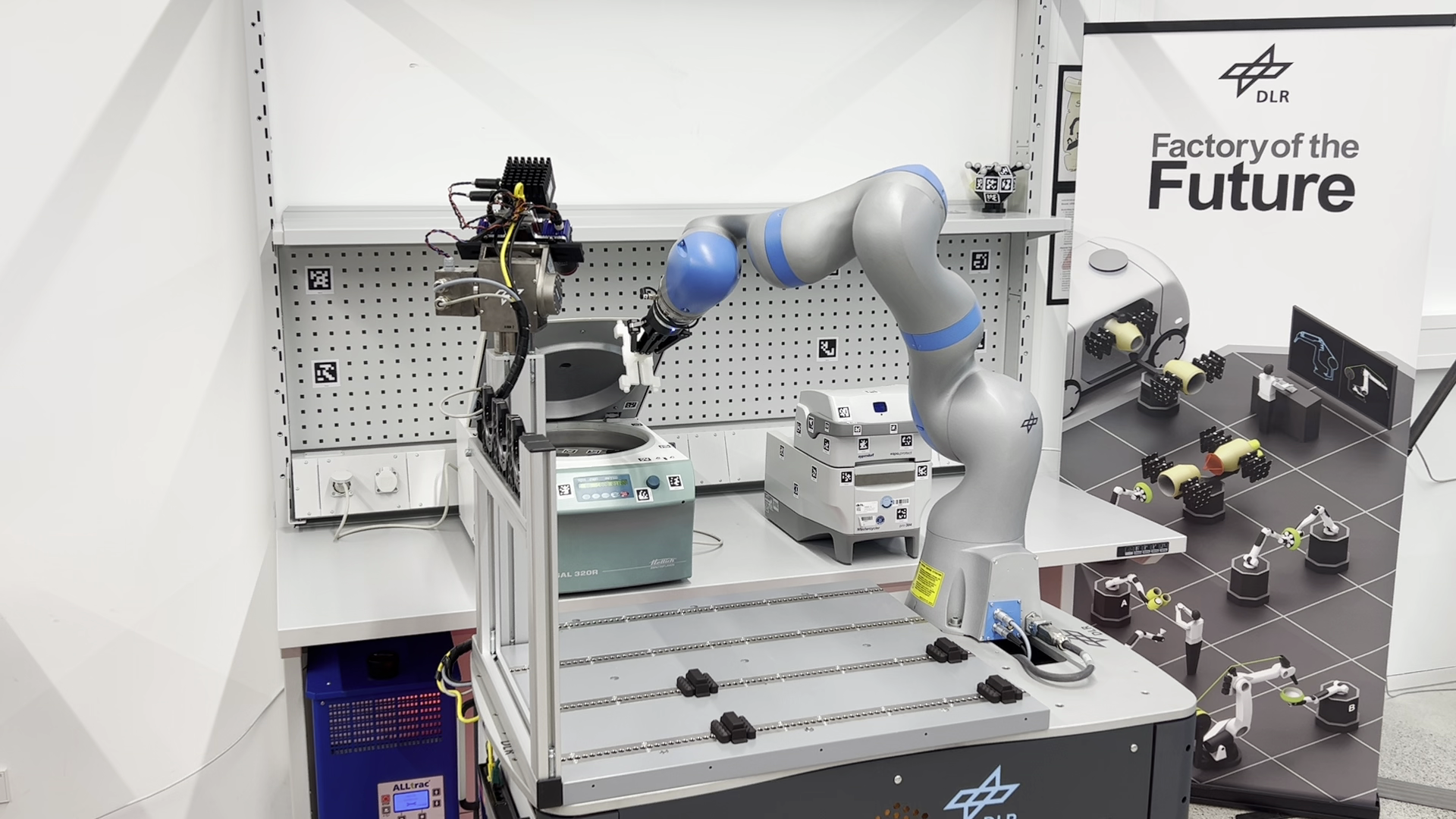
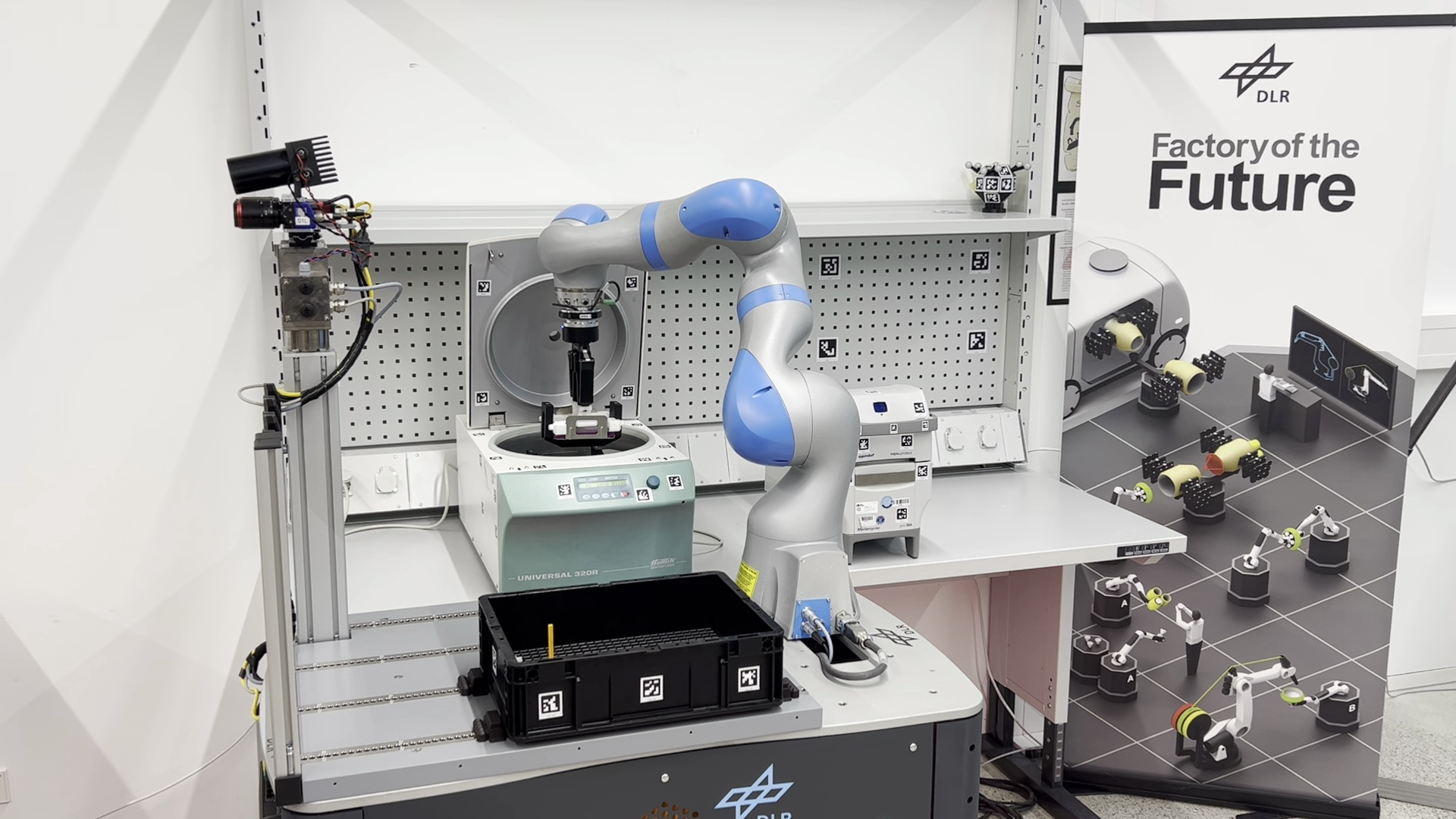
The AIMM mobile manipulator inserts a sample into a laboratory device for PCR tests.




{kind=link}
{kind=link}
{kind=link}