Im Rahmen des ALARO-Projekts wird das Institut für Robotik und Mechatronik die United Robotics Group (URG) als deutschen Technologieanbieter für die automatisierte Labor-Analyse mit mobilen Roboter qualifizieren. Angesichts der ausklingenden Pandemie soll die Technologie im Rahmen von Laboraufgaben, die im Alltagsgeschäft in Krankenhäusern anfallen, bewertet werden. Es werden Technologien entwickelt, welche die mobilen Manipulation von bekannten Objekten in einer unbekannten Umgebung ermöglicht.
Die COVID-19-Pandemie hat uns gezeigt, dass unsere Gesellschaft einem pandemischen Erreger ohne technologische Maßnahmen derzeit fast hilflos ausgeliefert ist. Soziale Distanzierungsmaßnahmen verhindern, dass Gegenmittel und Impfstoffe in angemessener Zeit erforscht werden können. Das CoViPa-Projekt der HGF hat gezeigt, dass mobile Labor-Roboter eine praktikable Lösung für dieses Problem sind. Allerdings gibt es derzeit kein Produkt auf dem Markt, das schnell und in großem Maßstab eingeführt werden könnte, um den Forschenden wirklich zu helfen. Im Rahmen des ALARO-Projekts werden die Erkenntnisse, die das Institut für Robotik und Mechatronik aus CoViPa gewonnen hat, genutzt, um die United Robotics Group (URG) als deutschen Technologieanbieter für diese Herausforderung zu qualifizieren. Angesichts der ausklingenden Pandemie soll die Technologie im Rahmen von Laboraufgaben, die im Alltagsgeschäft in Krankenhäusern anfallen, bewertet werden. Es werden Technologien entwickelt, welche die mobilen Manipulation von bekannten Objekten in einer unbekannten Umgebung ermöglicht. Dabei ist es wichtig, dass die Entwicklung der Hardware (URG) und die Entwicklung der Software (DLR) als Ganzes betrachtet werden. Dies ist besonders wichtig, wenn Systeme in unbekannten Umgebungen operieren, in denen das System mit erhöhten Unsicherheiten in der Wahrnehmung konfrontiert ist, die die Bewegungsplanung beeinflussen.
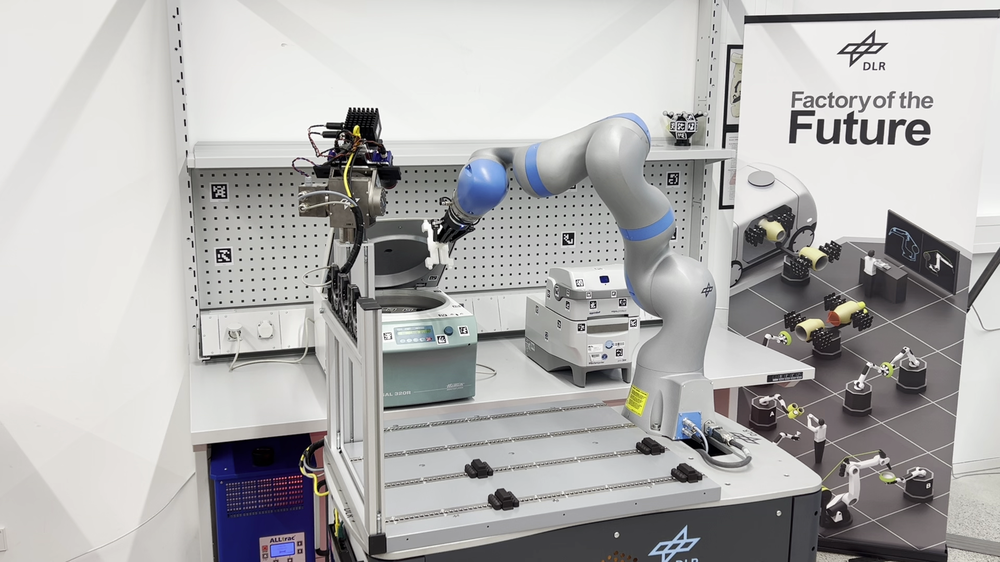
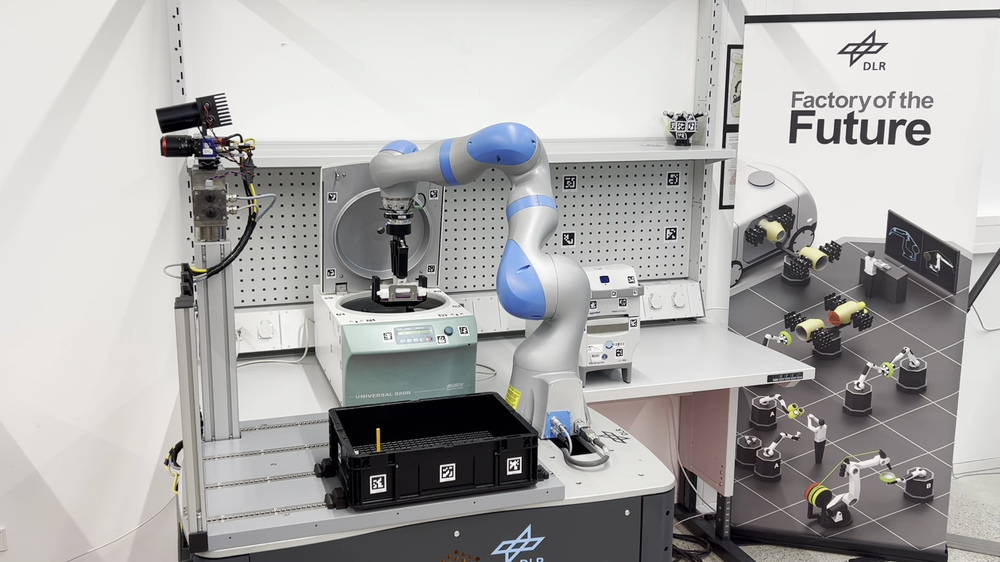
Der Mobile Manipulator AIMM fügt eine Probe in ein Laborgerät für PCR tests ein.



{kind=link}
{kind=link}
{kind=link}