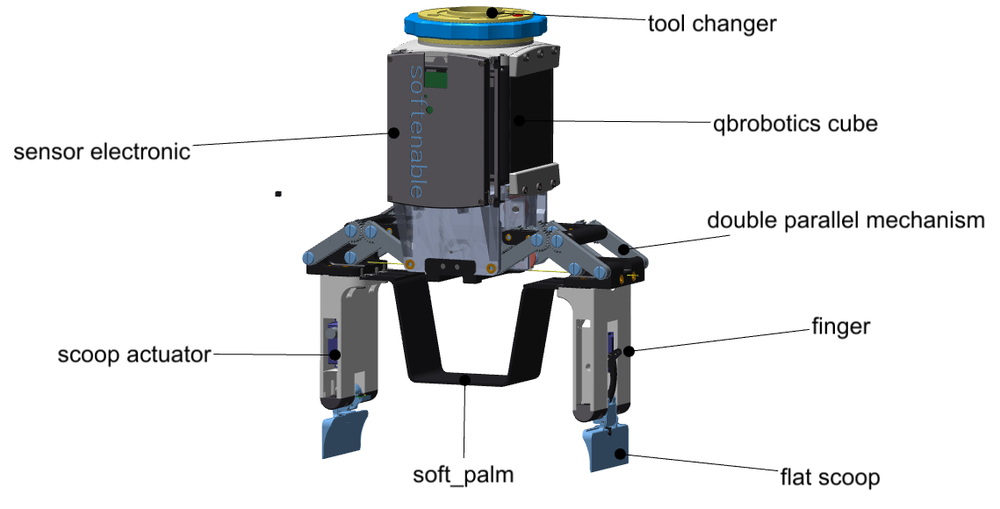
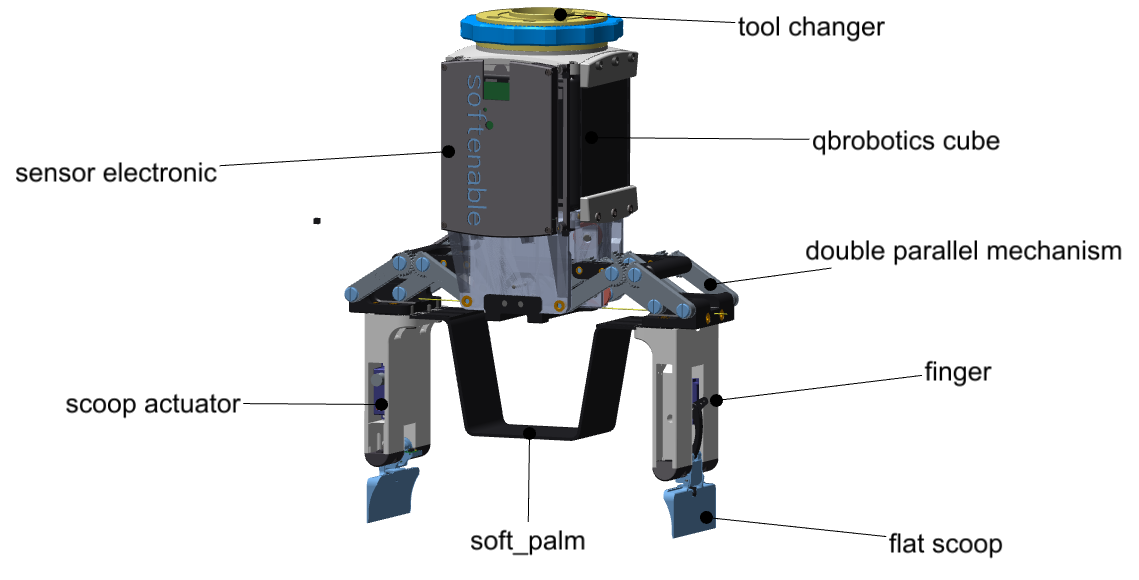
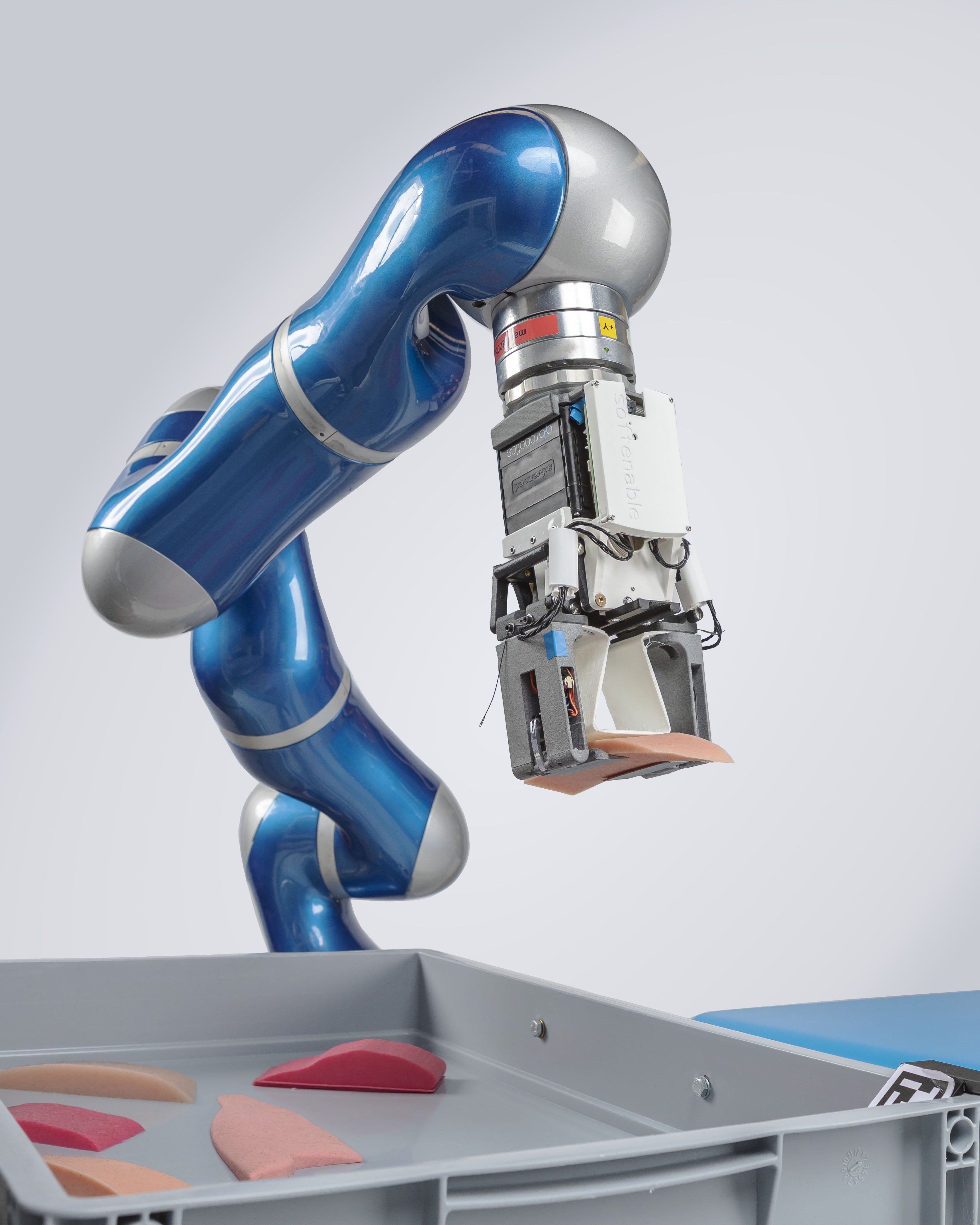
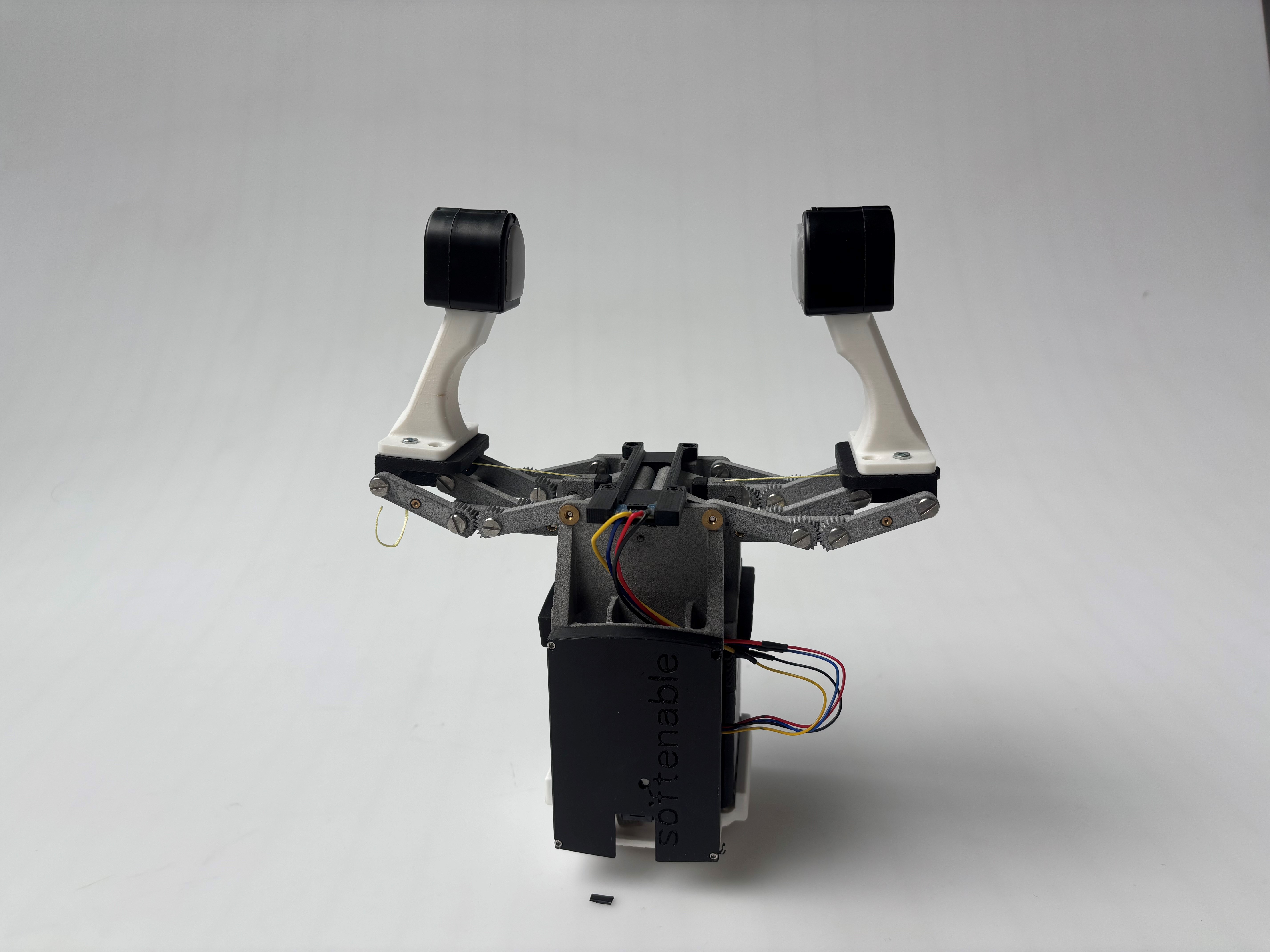
The Linear Scoop Gripper was developed as part of the Softenable EU project and is designed to grasp flexible objects such as fish or meat. Its special kinematics allow it to pick up flat objects from a table without the robot having to make a compensatory movement. This enables the two small scoops to slide underneath the object to be grasped. The scoops have two additional actuators that can be controlled via a sensor board. A flexible palm secures the object during transport. This version of the gripper was unveiled to the public at Automatica 2025.
Gripping soft, flat objects with simple two-jaw grippers is not possible without damaging them. The Linear Scoop Gripper has two capabilities that allow it, for example, to grip a fish fillet from below. The first capability is the ability to close the fingers without the robot having to make a compensatory movement to maintain contact with the surface. The second capability is the adjustable scoops. These allow even complex strategies to be executed. This is particularly necessary in heavily packed boxes. The strategy was developed based on examples of how humans grip fish fillets.
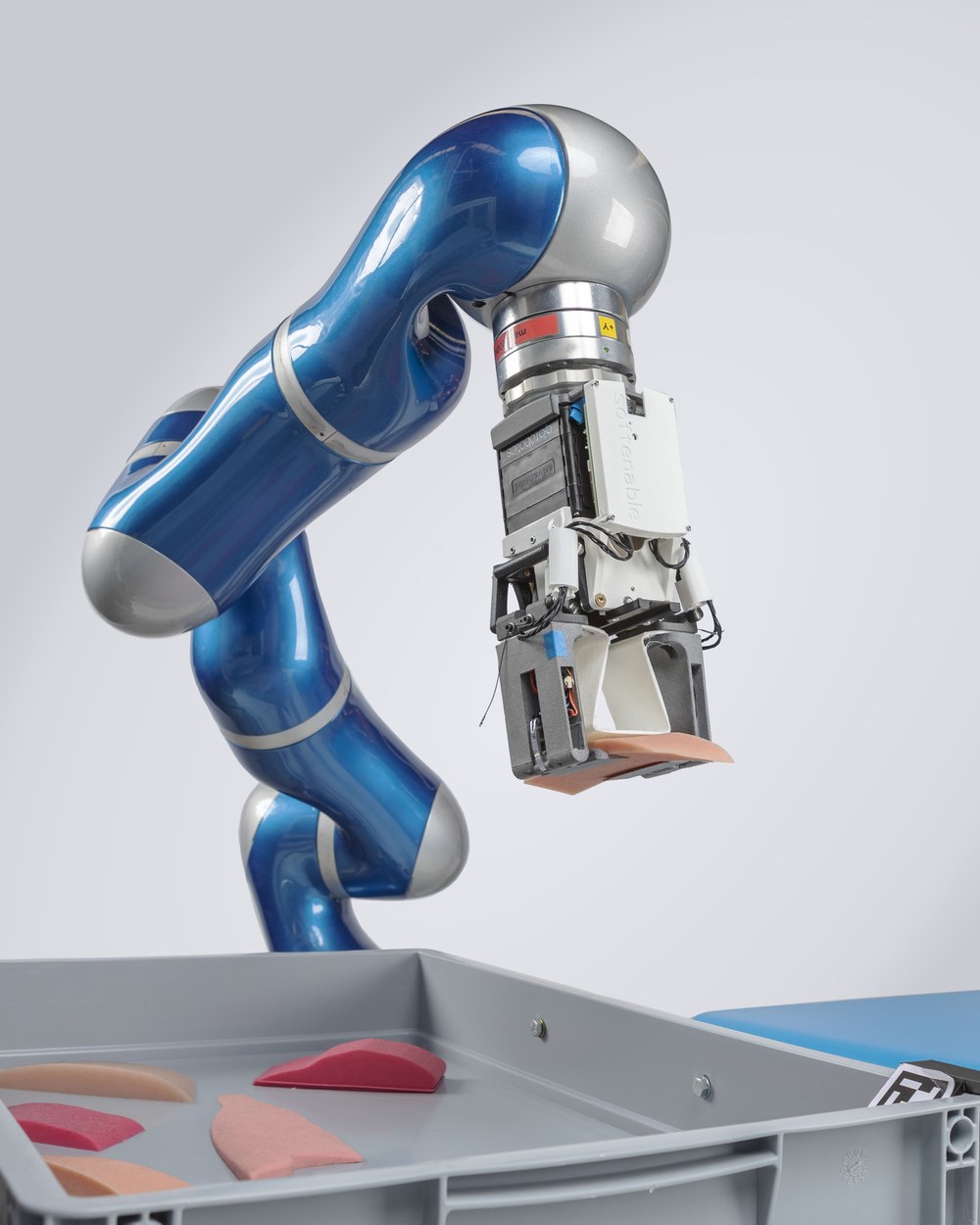
LSG holding a silicone salmon (2026)
The LSG was designed to grasp fish from below and secure the fish during transport using the curved palm.
The Linear Scoop Gripper places a silicone salmon on a conveyor belt. Precise placement is a challenging task when dealing with flexible objects. (2026)



{kind=link}
{kind=link}
{kind=link}
{kind=link}