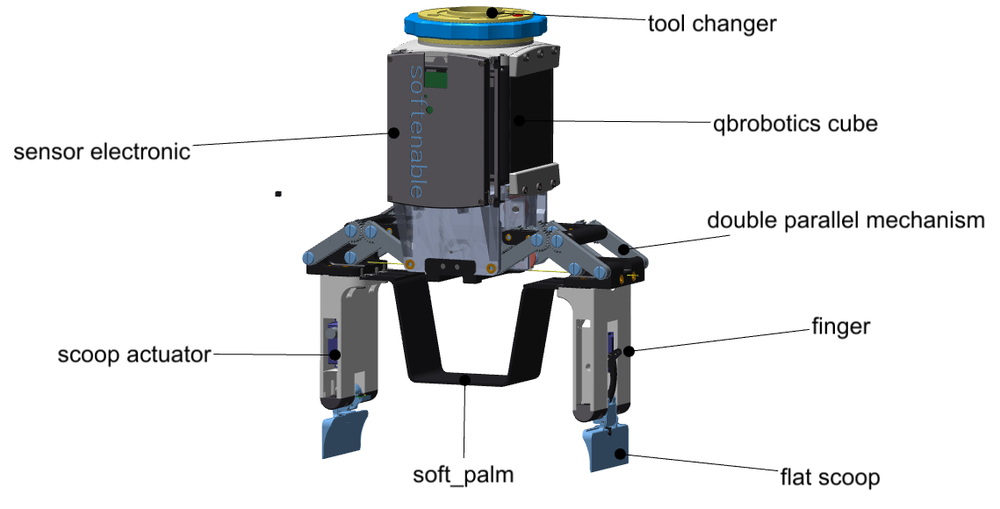
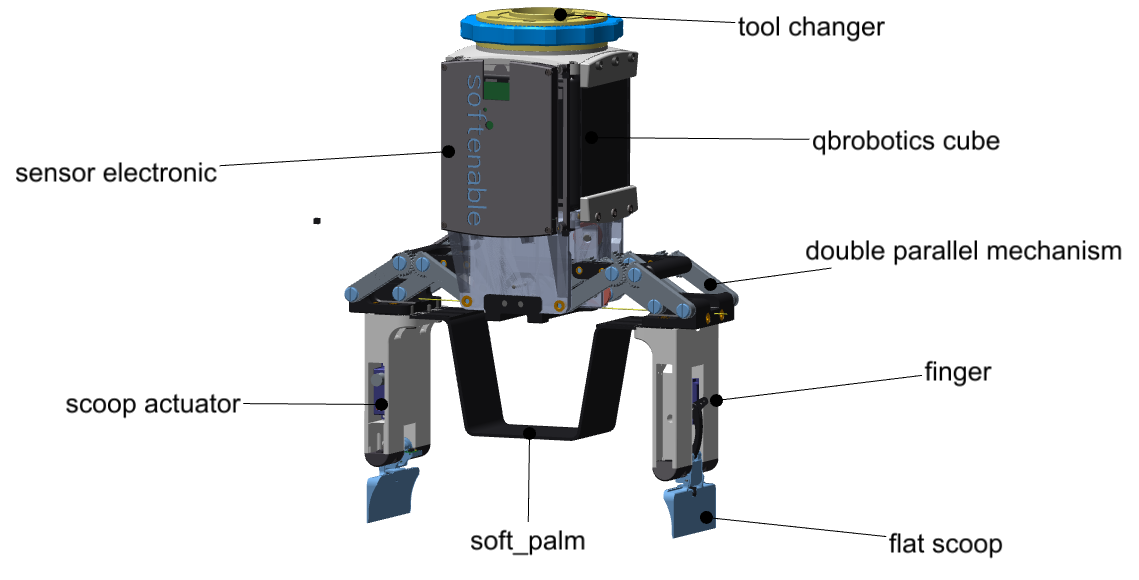
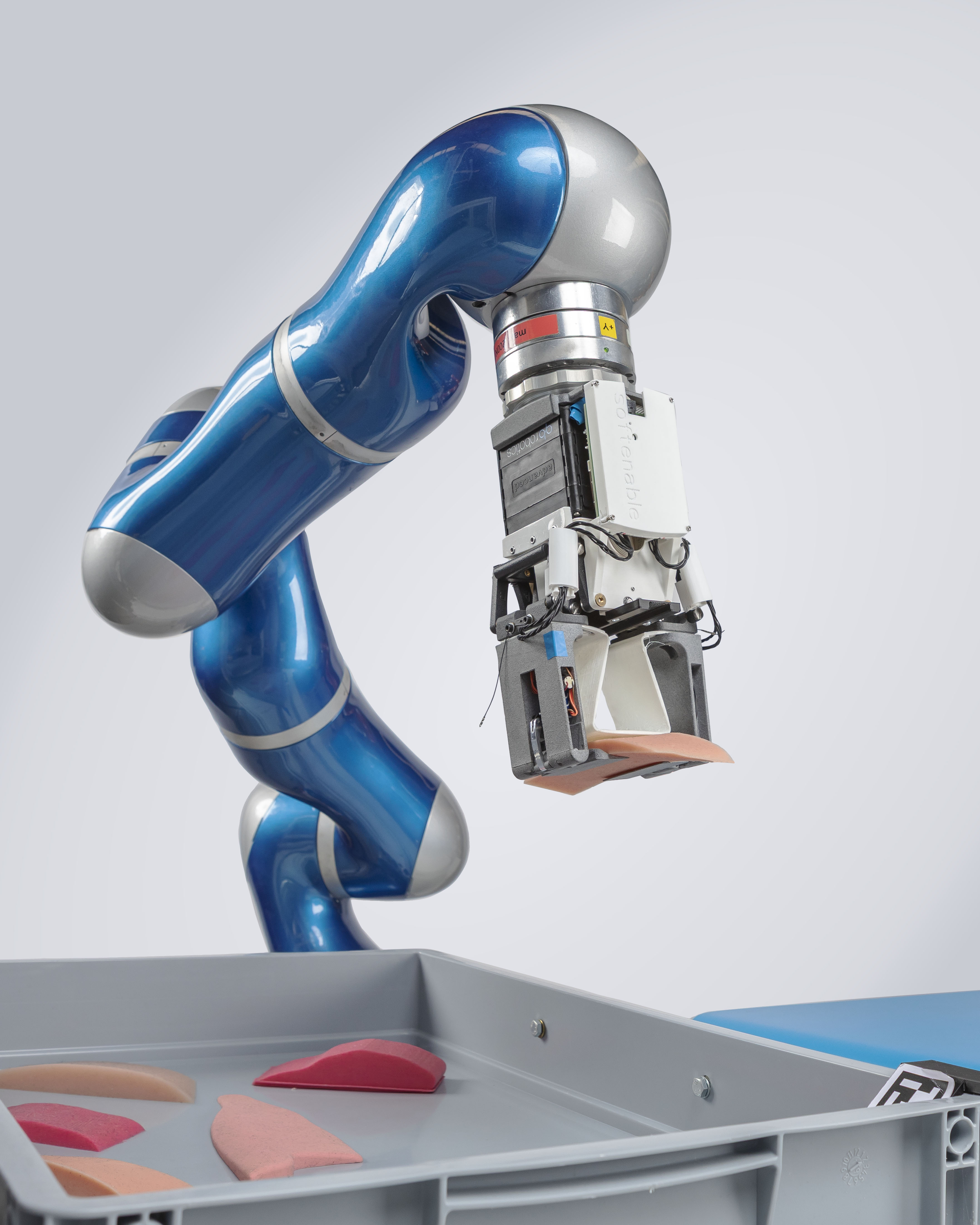
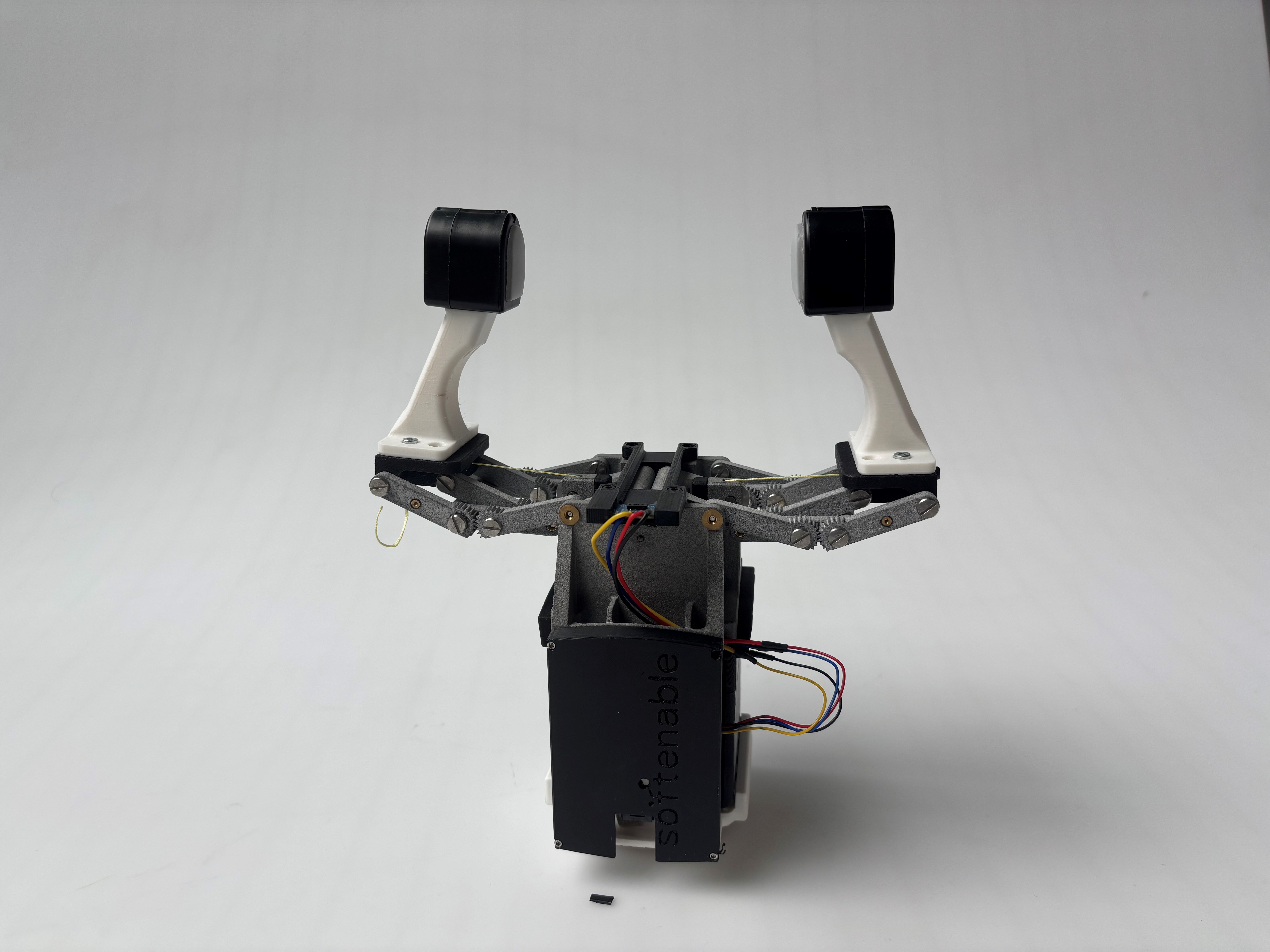
Der Linear Scoop Gripper wurde im Rahmen des EU-Projekt Softenable entwickelt und dient dazu, nachgiebige Objekte wie Fisch oder Fleisch zu greifen. Seine spezielle Kinematik erlaubt es, flache Objekte vom Tisch zugreifen, ohne dass der Roboter eine Ausgleichsbewegung machen muss. Dies ermöglicht es, dass die zwei kleinen Scoops unter das zu greifende Objekt rutschen können. Die Scoops besitzen zwei zusätzliche Aktuatoren, die über eine Sensorboard angesteuert werden können. Eine nachgebiege Handfläche sichert das Objekt während des Transports. Der Greifer wurde in dieser Version 2025 auf der Automatica der Öffentlichkeit präsentiert.
Technische Daten
Abmessungen
150 mm x 75 mm x 200 mm
Gewicht
1100 g
Freiheitsgrade
3
Nominale Nutzlast
150 N
Energieversorgung
24 V
Geschwindigkeit
50 mm/s
Benutzerschnittstellen
RS485
Besonderheiten
nachgebiege Handfläche
tauschbare Finger
taktile Sensor können direkt angeschölossen werden
Das Greifen von nachgiebigen flachen Objekten funktioniert mit einfachen zwei Backengreifern nicht, ohne diese zu beschädigen. Der Linear Scoop Gripper besitzt zwei Fähigkeiten, die es erlauben, z.B. ein Fischfilet von unten zu greifen. Die erste Fähigkeit ist das Schließen des Fingers, ohne dass der Roboter eine Ausgleichsbewegung machen muss, um den Kontakt mit der Oberfläche zu halten. Die zweite Fähigkeit ergibt sich aus verstellbaren Schaufeln. Diese erlauben es, auch komplizierte Bewegungsstrategien umzusetzen. Dies ist besonders in stark gefüllten Boxen notwendig. Die Strategie wurde anhand anhand von Beispielgriffen, wie Menschen Fischfilets greifen, entwickelt.
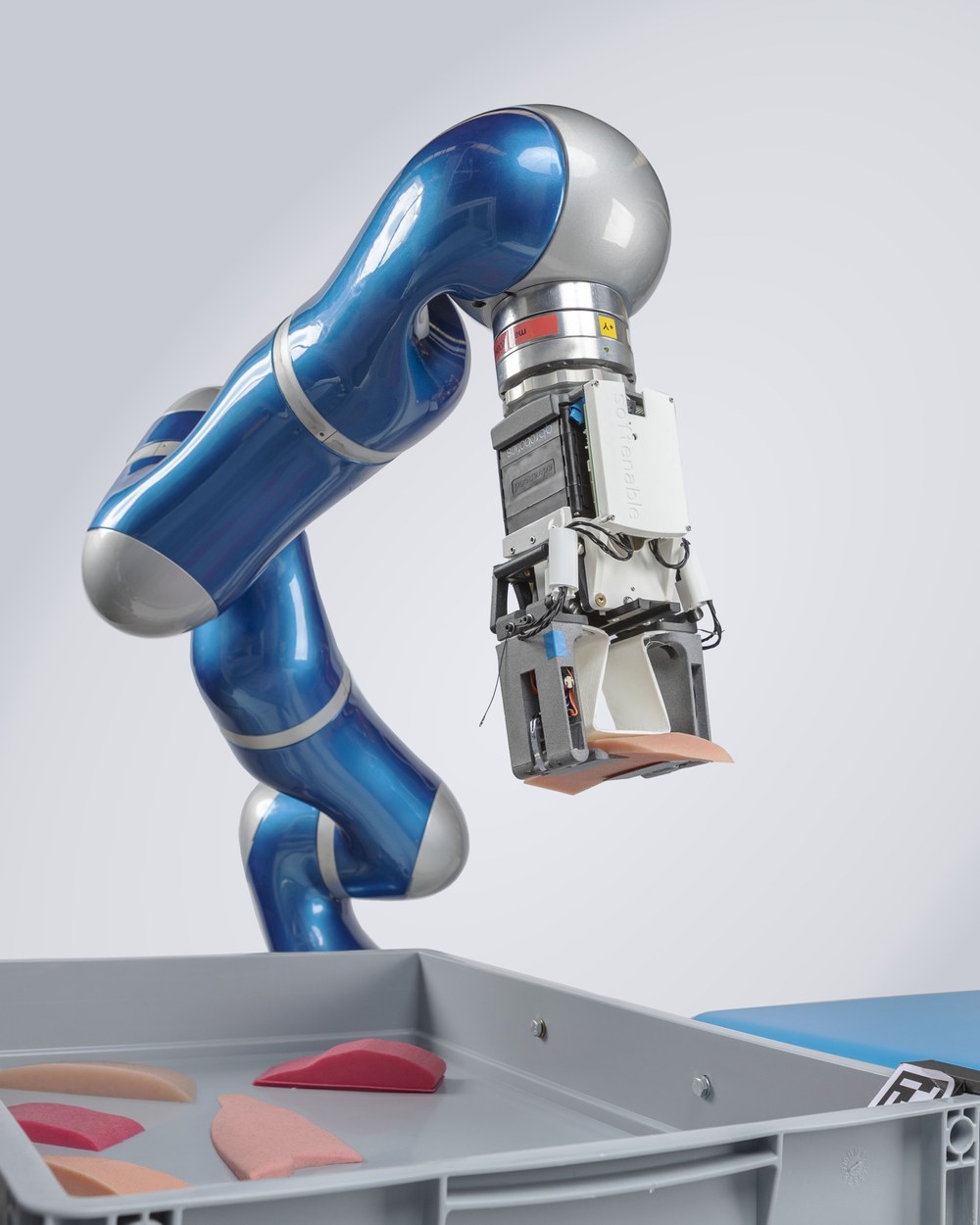
LSG greift einen Silikonlachs (2026)
Die LSG wurde entwickelt, um den Fisch von unten zu greifen und ihn während des Transports mit der nachgebiegen Handfläche zu sichern.
Der Linear Scoop Gripper legt einen Silikon-Lachs auf ein Förderband. Das genaue Ablegen ist für nachgiebige Objekte eine anspruchsvolle Aufgabe. (2026)



{kind=link}
{kind=link}
{kind=link}
{kind=link}