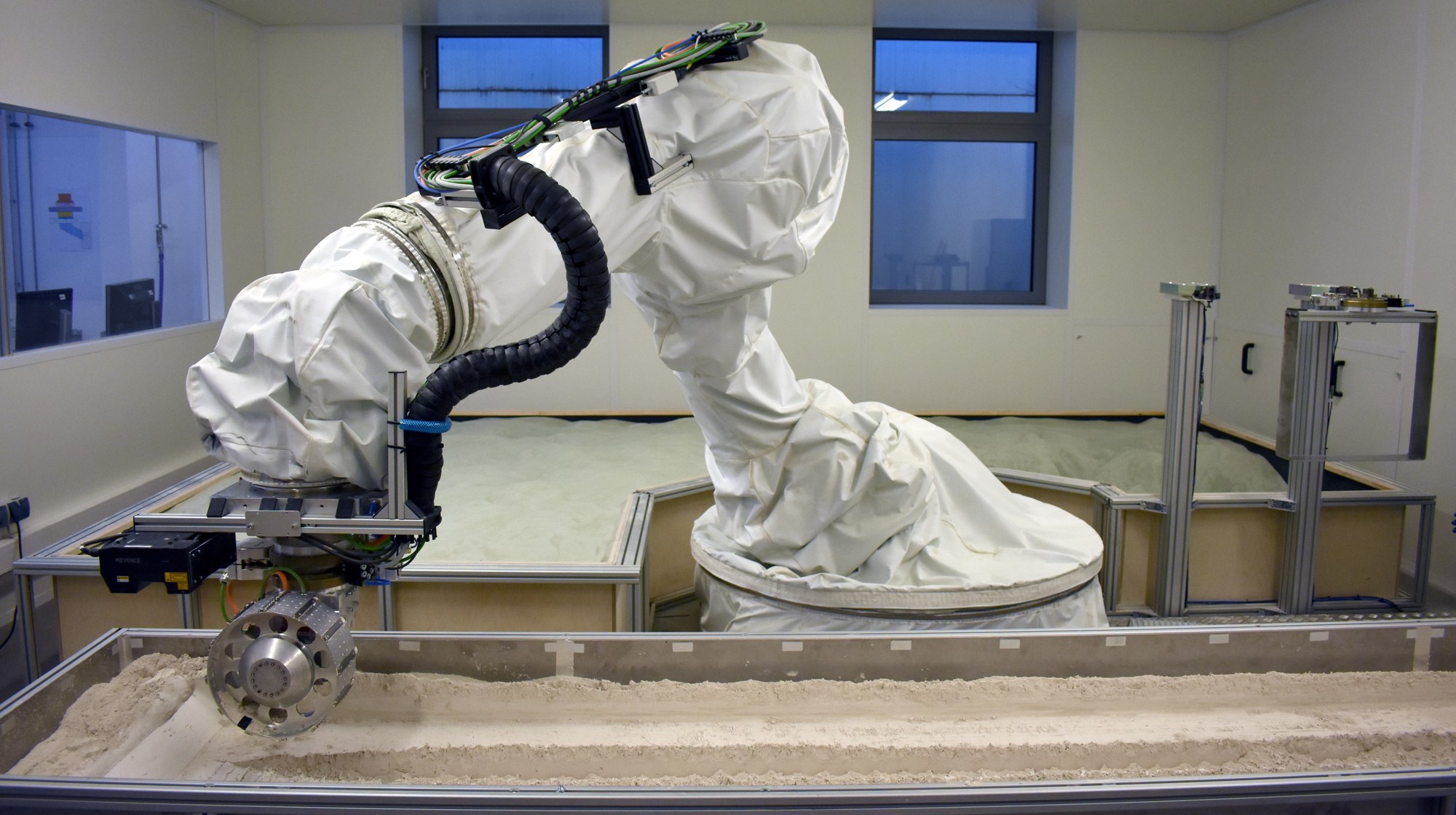
The Terramechanics Robotics Locomotion Lab (TROLL) is a test rig for the automated analysis of ground interactions. Unique is a flexible, fully automated test process consisting of soil preparation and the experiment itself. The force-controlled industrial robot used enables tests ranging from conventional single wheel tests with fixed slip to variants of this test with different tilt or slip angles and more complex experiments. In all applications, automated tillage is the basis for repeatable and reliable experiments.
Two test containers, one interchangeable and one fixed, provide a flexible test area. A soil fluidisation system can be used to quickly loosen the soil and complements the mechanical tillage tools. The tool change system allows automatic tool change between preparation and test tools, enabling a fully automated test sequence.
The single wheel tests can be carried out up to a length of 3 metres with a load of up to 1 kN and a maximum horizontal speed of more than 1 m/s. A flexible control interface allows easy switching between position and force control for each of the Cartesian axes, thus maximising flexibility.
The test stand's sensor system consists of a 6D force sensor and the position information provided by the robot. Each mould trajectory can thus be adjusted and compared with the resulting ground reaction forces. This data set is supplemented by a surface scan of the initial and final floor geometry.
Literature
F. Buse, T. Bellmann and R. Lichtenheldt: The Terramechanics Robotics Locomotion Lab in Proceedings of the 14th International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS), 2018.



{kind=link}
