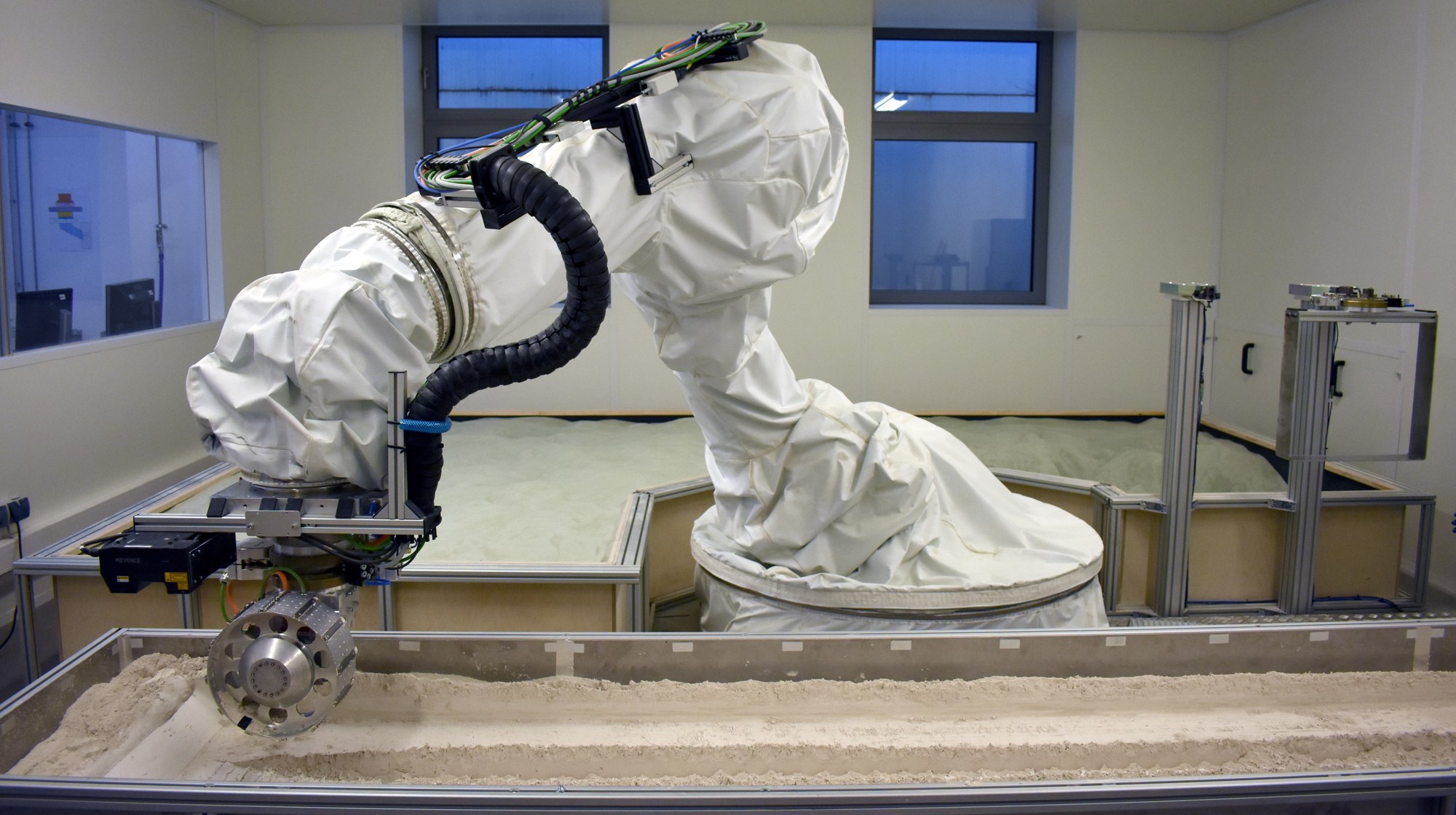
Das Terramechanics Robotics Locomotion Lab (TROLL) ist ein Prüfstand zur die automatisierten Analyse von Boden-Interaktionen. Einzigartig ist ein flexibler, vollautomatischer Testprozess, der aus Bodenaufbereitung sowie dem Experiment selbst besteht. Der eingesetzte kraftgesteuerte Industrieroboter ermöglicht konventionelle Einzelradversuche mit unterschiedlichen Neigungs- oder Schlupfwinkeln sowie komplexere Experimente. In allen Anwendungen ist die automatisierte Bodenbearbeitung die Grundlage für wiederholbare und zuverlässige Experimente.
Zwei Testbehälter, ein austauschbarer und ein fester, bieten einen flexiblen Testbereich. Ein Bodenfluidisierungssystem kann verwendet werden, um den Boden schnell zu lockern. Dieser ergänzt die mechanischen Bodenbearbeitungswerkzeuge. Das Werkzeugwechselsystem ermöglicht den automatischen Werkzeugwechsel zwischen Vorbereitungs- und Prüfwerkzeugen und gewährleistet einen vollautomatischen Prüfablauf.
Die Einzelradversuche können bis zu einer Länge von 3m bei einer Belastung von bis zu 1kN und einer maximalen horizontalen Geschwindigkeit von über 1m/s durchgeführt werden. Eine flexible Steuerungsschnittstelle ermöglicht einfaches Umschalten zwischen Positions- und Kraftregelung für jede der kartesischen Achsen und ermöglicht somit maximale Flexibilität.
Die Sensorik des Prüfstandes besteht aus einem 6D-Kraftsensor und den vom Roboter bereitgestellten Positionsinformationen. Jede Werkzeugtrajektorie kann so angepasst und mit den resultierenden Bodenreaktionskräften verglichen werden. Dieser Datensatz wird durch einen Oberflächenscan der Anfangs- und Endbodengeometrie ergänzt.
Literatur
F. Buse, T. Bellmann and R. Lichtenheldt: The Terramechanics Robotics Locomotion Lab in Proceedings of the 14th International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS), 2018.



{kind=link}
