MASCOTs Landung auf dem Asteroiden - Vorbereitungen, Risiken und letzte Entscheidungen


{kind=link}

{kind=link}
- Schwerpunkt(e): Raumfahrt, Exploration des Weltraums, Missionen
Fast vier Jahre mussten Wissenschaftler und Ingenieure warten, bis die japanische Hayabusa2-Sonde mit dem vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) entwickelten und gebauten Lander MASCOT (Mobile Asteroid Surface Scout) an Bord ihr Ziel erreichte: den Asteroiden Ryugu. Mit der Annäherung und der Ankunft am 27. Juni 2018 ist die Landung nun in greifbare Nähe gerückt. Voraussichtlich in der ersten Oktoberwoche 2018 - davon wird nach derzeitigen Planungen ausgegangen - wird mit MASCOT zum ersten Mal ein wissenschaftliches Labor mit Instrumenten gezielt auf einem Asteroiden landen. Zurzeit führt die japanische Raumfahrtagentur JAXA mit der Raumsonde Hayabusa2 Messungen durch, die die Schwerkraft des Asteroiden präziser bestimmen sollen. Diese Angabe ist auch für die Landung von MASCOT eine wichtige Größe. Auf der Asteroidenoberfläche wird MASCOT an mehr als einem Ort Messungen durchführen. Dabei wird er autonom "entscheiden" und die Instrumente betreiben. Projektleiterin Dr. Tra-Mi Ho vom DLR-Institut für Raumfahrtsysteme erläutert im Interview, wie das Team den Lander MASCOT auf seine Mission vorbereitet, wie seine Arbeit auf dem Himmelskörper ablaufen wird - und welche Risiken auf ihn warten.
Als MASCOT am 3. Dezember 2014 startete, war der Asteroid Ryugu noch eher unbekanntes Gebiet. Jetzt hat die Kamera von Hayabusa2 zumindest aus sechs Kilometern Entfernung auf den Asteroiden geblickt. Inwiefern helfen diese Informationen dem Team, sich und den Lander auf die Landung vorzubereiten?
Wir bekommen mehr und mehr ein Gefühl dafür. Viele dieser Informationen sind aber auch noch in der Auswertung - damit diskutieren wir dann in zwei Schritten am 14. sowie am 17. August 2018, welcher Landeplatz der Richtige ist. Wir wissen: Wir können MASCOT nicht in den höheren Breitengeraden - also den Polen des Asteroiden - landen lassen. Und da die Hayabusa2-Sonde sich zur Entnahme von Asteroidenmaterial auf Ryugu absenken wird, gibt es dadurch für MASCOT natürlich auch Einschränkungen, da MASCOT der Probenentnahme "nicht im Wege" stehen darf. Jedoch gibt es nach der ersten Bewertung der Daten noch genügend interessante Regionen in den mittleren Breitengraden.
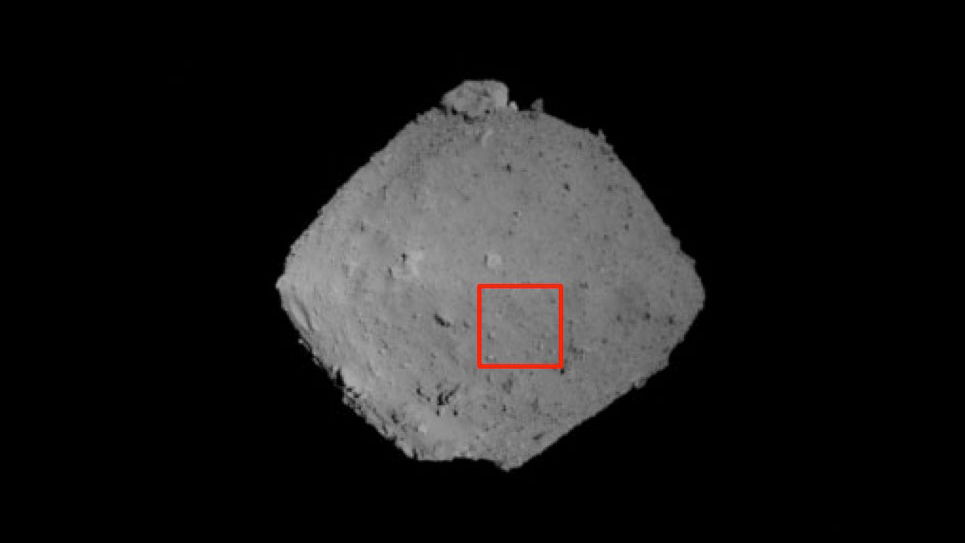
Auf den aktuellen Aufnahmen erkennt man gut, dass der Asteroid von großen Brocken übersät ist und auch große Krater auf seiner Oberfläche hat. Wird dies auf die Landung Auswirkungen haben?
Der Krater beunruhigt uns nicht - wir könnten dort auch landen. Von der Topographie her ist derzeit nichts ausgeschlossen. Es gibt aber andere Kriterien wie die physikalischen Eigenschaften von Ryugu, die wir berücksichtigen müssen - zum Beispiel die thermischen Bedingungen auf dem Asteroiden. Wenn es für MASCOT zu heiß wird, ist es ungünstig: Die Instrumente können nur in ihren vorgesehenen Betriebstemperaturen optimal arbeiten, sonst erhält man zu viel Rauschen in den erfassten Daten. Und zu hohe oder zu niedrige Temperaturen sind auch nicht gut für die Batterie, weil sie sich sonst gefährlich aufheizen oder nutzbare Kapazität verlieren würde.
Die Landung von MASCOT und sein Betrieb auf dem Asteroiden werden immer wieder über Simulationen getestet und optimiert. Was muss das MASCOT-Team über den Asteroiden Ryugu wissen, um den Lander bestmöglich auf seine Mission vorzubereiten?
Die japanische Raumfahrtagentur JAXA führt derzeit Gravitationsmessungen am Asteroiden durch - da warten wir auf die genauen Werte zur Schwerkraft von Ryugu. Diese wirkt sich auf das Bouncing-Verhalten, das Abprallen, von MASCOT aus und somit auch auf die finale Stelle, an der der Lander nach dem Abwurf dann zur Ruhe kommen wird. Entscheidend ist wie gesagt auch die Information über die thermischen Eigenschaften des Asteroiden. Das fehlt noch und wird gerade untersucht. Ein weiterer wichtiger Aspekt ist die Größe der Felsen auf Ryugu. MASCOT könnte ja steckenbleiben, wenn die Felsen eine gewisse Größe haben.
Mit jeder neuen Information über Ryugu wird also die Mission mit MASCOT konkreter und planbarer. Welche Anpassungen und Entscheidungen konnte das MASCOT-Team bereits treffen?
Bei unserer letzten Simulation haben wir beispielsweise festgestellt, dass bei weiten Hüpfsprüngen, das heißt, wenn wir mehr als zehn Meter hüpfen, sehr viel Zeit durch die Aufprallphase verloren gehen würde, bis MASCOT wieder zur Ruhe kommt. Diese Zeit ist aber wichtig, weil wir nur 16 Stunden Lebenszeit haben. Und wir müssen auch bedenken, dass MASCOT seine Daten auch noch zur Hayabusa2-Sonde hochladen muss. Von wissenschaftlicher Seite her sieht es zudem so aus, als wäre die Zusammensetzung von Ryugu über die Asteroidenoberfläche hinweg nicht so unterschiedlich. Wir benötigen gar nicht die großen Sprünge, um an einer weit entfernten Meßtelle etwas noch interessanteres zu finden - die Hüpfweite wird also einen bis mehrere Meter betragen.
Was wird denn derzeit hier am Boden in Laboren oder am Rechner gemacht, damit die Landung und die wissenschaftliche Arbeit vollautomatisch und reibungslos ablaufen können?
Einerseits ist es die Bestimmung des richtigen Landeplatzes. Für uns Ingenieure ist es wichtig, dass die thermalen Bedingungen stimmen, aber MASCOT muss auch an einer Stelle landen, bei der der Wechsel von Asteroidentag und Asteroidennacht gut ist. Nacht bedeutet: Wir haben keine Sicht auf Hayabusa2 und können auch keine Daten hochladen und auf der Sonde speichern.
Außerdem legen wir gerade die operationellen Sequenzen für MASCOT fest. Der Lander wird autonom auf dem Asteroiden betrieben und muss mit diesen Sequenzen robust funktionieren, damit die Wissenschaft durchgeführt werden kann. Während der Mission entscheidet MASCOT, wie und wann er diese Sequenzen startet. Ein eingebauter Autonomiemanager im Lander legt dann fest, wann MASCOT zur Ruhe gekommen ist und mit Messungen beginnen kann.
MASCOT muss also komplett selbstständig Entscheidungen treffen?
Genau, MASCOT entscheidet alleine. Allerdings haben wir ihm auch "Time outs" als Limits mitgegeben. Sollte MASCOT falsch entscheiden, weil für ihn zum Beispiel die Informationen von Sensoren nicht ideal sind, würde er nach einer vorgegebenen Zeitdifferenz dennoch mit den Messungen beginnen. Wir wollen ja nicht unnötig Zeit verlieren.
Die Landung ist für die erste Oktoberwoche 2018 geplant. Wovon hängt dies ab, und wie sicher ist dieser Zeitpunkt?
Der konkrete Termin hängt von verschiedenen Kriterien ab. Die Landung erfolgt in Koordination mit dem Betrieb der Hayabusa2-Raumsonde. Die Sonde muss für die Separation von MASCOT ja in Richtung Asteroidenoberfläche absteigen und den Lander zu einem bestimmten Zeitpunkt an einem bestimmten Ort ausstoßen. Auch der Landeplatz hat Auswirkungen auf die Zeitplanung. Und dann haben wir im Team natürlich eine Checkliste: Es gibt Fehlermeldungen, bei denen wir später landen müssen. Dies hängt aber davon ab, wie gravierend die Fehlermeldung ist und welche Maßnahmen noch möglich sind, den Fehler zu korrigieren. Allerdings gibt es auch einen "Point of no Return" - also einen Zeitpunkt, ab dem man die Landung nicht mehr abbrechen kann.
Am MASCOT-Kontrollzentrum im Nutzerzentrum für Weltraumexperimente (MUSC) des DLR befindet sich auch ein repräsentatives Modell von MASCOT, mit dem kontinuierlich Tests stattfinden. Bis zu welchem Zeitpunkt können Konfigurationsänderungen zu MASCOT ins All geschickt werden?
Die letzte Möglichkeit wird im Verlauf des Septembers bis relativ kurz vor der Landung sein. Wahrscheinlich etwa zwei Wochen, bevor MASCOT zur Landung ausgestoßen wird. Da werden wir noch Sequenzen hochladen. Die letzten Parameter können noch hochgeladen werden, bevor der eigentliche Landeprozess eingeleitet wird. Wir haben auch gerade einen Gesundheitscheck durchgeführt und Instrumente und Subsysteme eingeschaltet. Der Gesundheitszustand des Landers ist wie erwartet nominell. Bis zur Landung werden wir noch zwei Kontakte zu MASCOT haben. Diese planen wir spezifisch für die ausgewählte Landestelle.
Mit der Aufnahme von Ryugu aus nur sechs Kilometern Entfernung hat das Team erstmals aus der Nähe gesehen, wo MASCOT landen und arbeiten wird. Wie war die Reaktion darauf?
Ich war letztendlich erleichtert, dass es nicht ein Himmelskörper wie Churyumov-Gerasimenko ist, der Komet, auf dem der Lander Philae im November 2014 landete. Zumindest ist Ryugu gleichmäßiger als der Komet Churyumov-Gerasimenko. Man macht sich natürlich Gedanken, wenn man diese vielen Felsen sieht - und sorgt sich, ob es nicht doch sehr herausfordernd für MASCOT ist.
Was wäre denn das Schlimmste oder Gefährlichste, was MASCOT während der Mission passieren könnte?
Das Schlimmste, wenn MASCOT nicht separiert wird - wenn er einfach in der Hayabusa2-Sonde steckenbleibt. Oder wenn der Lander sich auf der Asteroidenoberfläche nicht aufrichten kann - entweder weil er zwischen Felsen steckt oder auf sehr weichem Untergrund gelandet ist. Das sind die beiden Szenarien, vor denen natürlich alle Angst haben. Aber wenn MASCOT zur Ruhe gekommen ist und wir die ersten Signale erhalten und wissen, dass er schon während des freien Falls Messungen durchgeführt hat - dann wird das eine große Erleichterung sein.
Über die Mission Hayabusa2 und MASCOT
Hayabusa2 ist eine Weltraummission der japanischen Raumfahrtagentur JAXA (Japan Aerospace Exploration Agency) zum erdnahen Asteroiden Ryugu. Der deutsch-französische Lander MASCOT an Bord von Hayabusa2 wurde vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) entwickelt und gebaut in enger Kooperation mit der französischen Raumfahrtagentur CNES (Centre National d'Études Spatiales). Die wissenschaftlichen Experimente an Bord von MASCOT sind Beiträge des DLR, des Institut d'Astrophysique Spatiale und der Technischen Universität Braunschweig. Betrieb und Steuerung des MASCOT-Landers und seiner Experimente erfolgen durch das DLR mit Unterstützung der CNES und in kontinuierlichem Austausch mit der JAXA.
Das DLR-Institut für Raumfahrtsysteme in Bremen entwickelte federführend zusammen mit CNES den Lander und testete ihn. Das DLR-Institut für Faserverbundleichtbau und Adaptronik in Braunschweig war für die stabile Struktur des Landers zuständig. Das DLR Robotik und Mechatronik Zentrum in Oberpfaffenhofen entwickelte den Schwungarm, der Mascot auf dem Asteroiden hüpfen lässt. Das DLR-Institut für Planetenforschung in Berlin steuerte die Kamera MASCAM und das Radiometer MARA bei. Überwacht und betrieben wird der Asteroidenlander aus dem MASCOT-Kontrollzentrum im Nutzerzentrum für Weltraumexperimente (MUSC) am DLR-Standort Köln.