
Außeninstallation von ROKVISS an Internationaler Raumstation
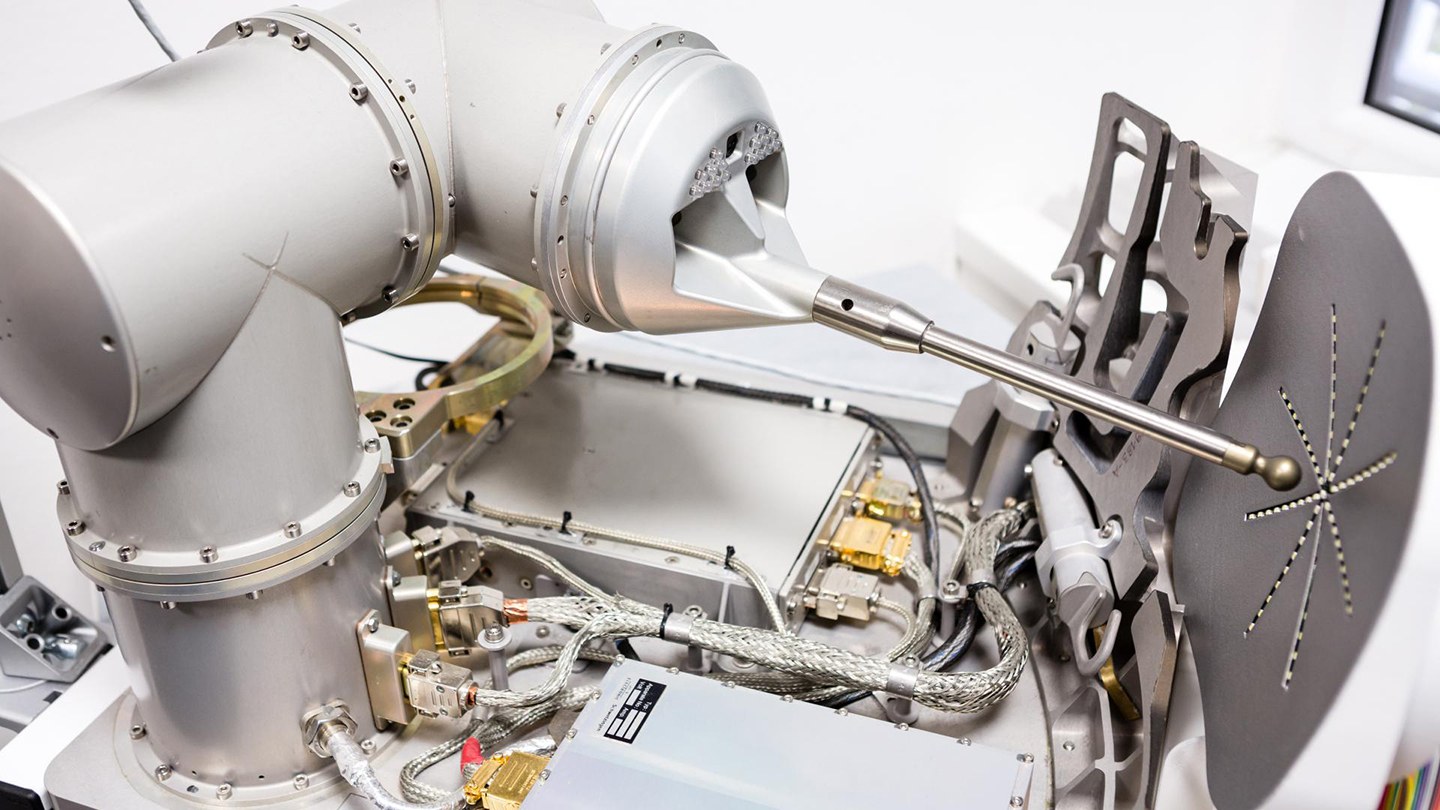

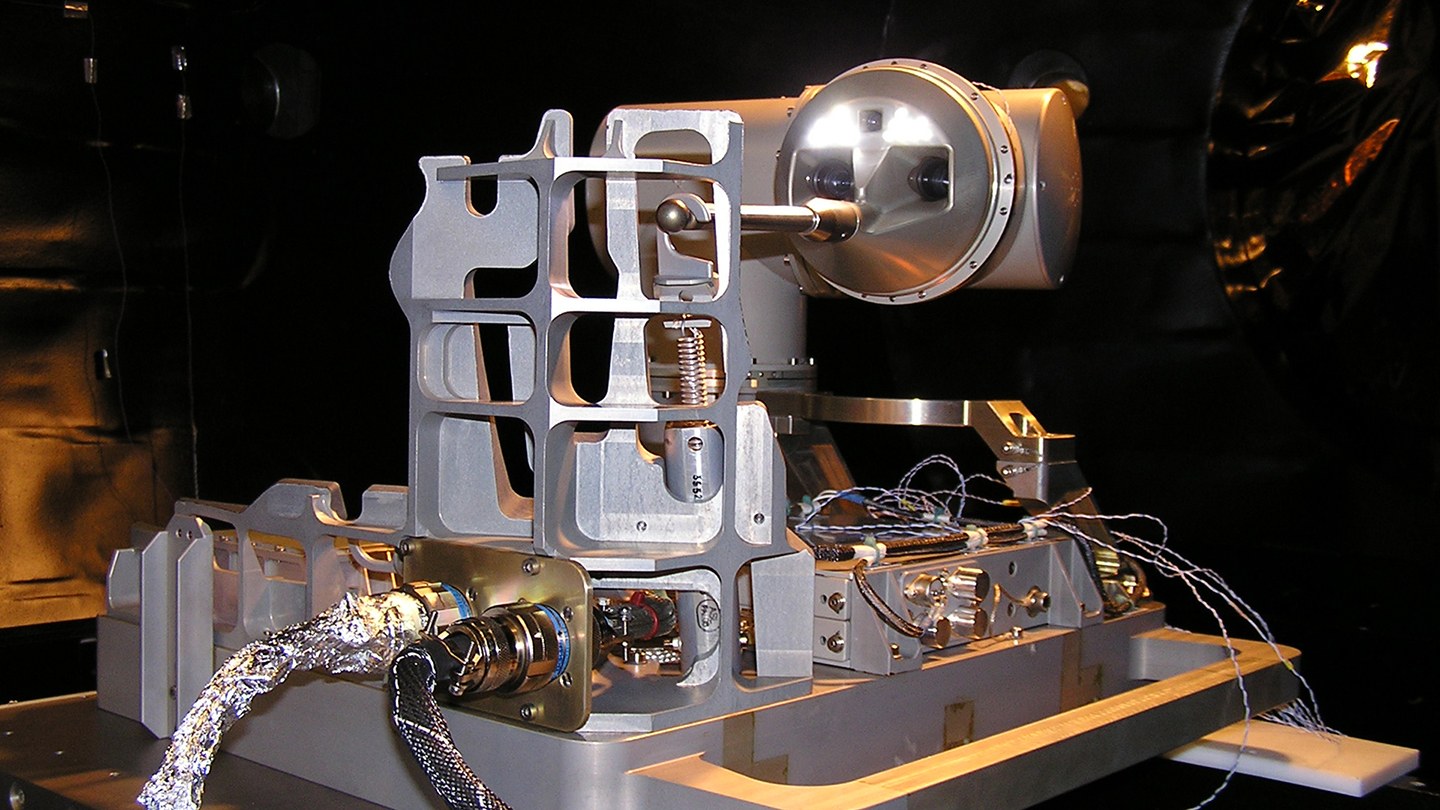
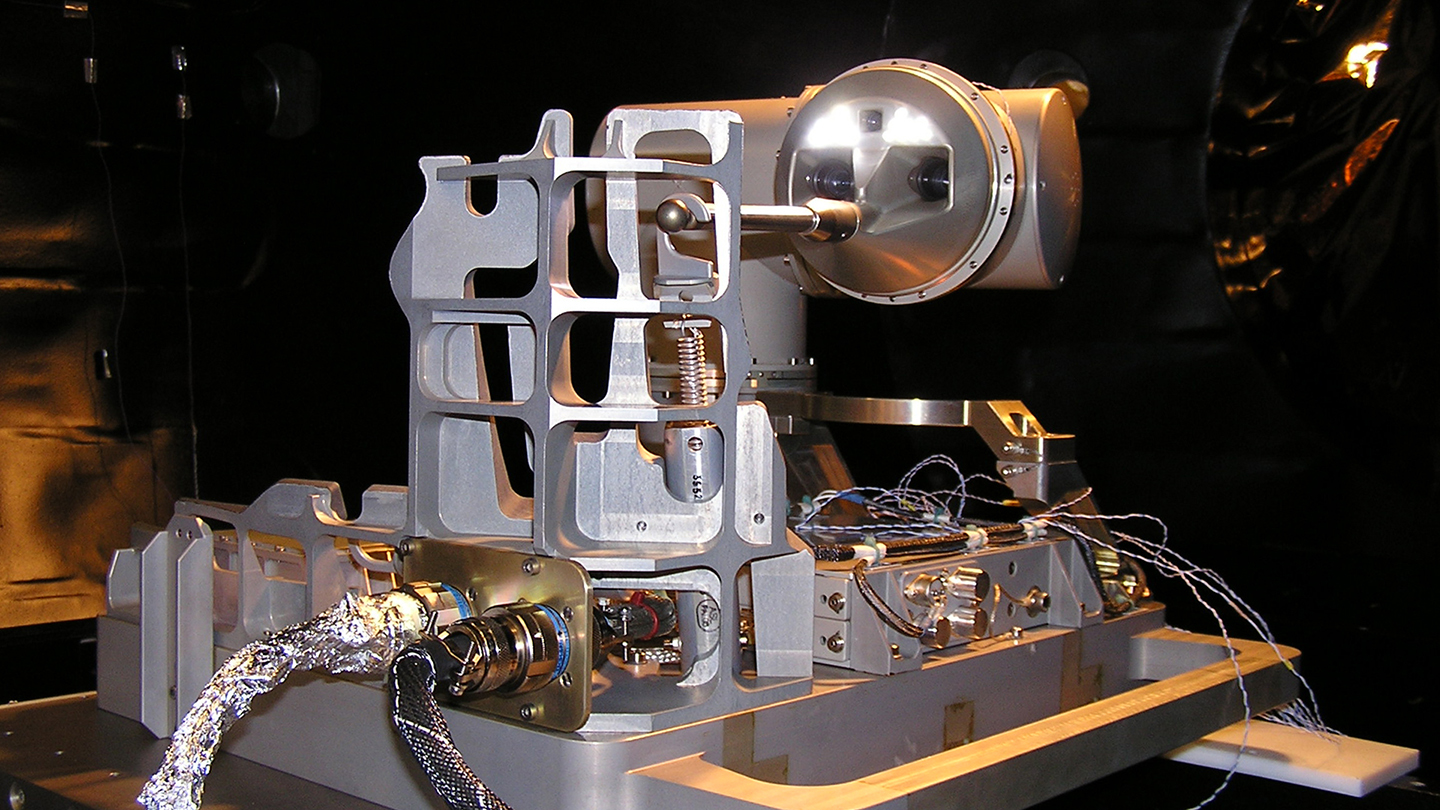
Bonn - Das am Deutschen Zentrum für Luft- und Raumfahrt (DLR) entwickelte Technologieexperiment ROKVISS (Robotik-Komponenten-Verifikation auf der ISS) wird am 26. Januar 2005 von den Astronauten der Internationalen Raumstation ISS an der Außenplattform der Station montiert. Am 24. Dezember 2004 war die deutsche Robotertechnologie vom Weltraumbahnhof Baikonur zusammen mit Lebensmitteln für die Besatzung zur ISS gestartet. Nach Tests im Februar wird der rund 50 Zentimeter große Roboterarm mit zwei Gelenken, einem Metallfinger und zwei integrierten Kameras ab März in Betrieb genommen.
Am 26. Januar 2005 um 8.26 Uhr MEZ werden der US-Astronaut Leroy Chiao und sein russischer Kollege Salizhan Sharipov die Luftschleuse der ISS öffnen und während eines etwa sechsstündigen "Weltraumspaziergangs", einer Extra Vehicular Activity (EVA), die Außenmontage des ROKVISS-Roboters durchführen. Dazu befestigen die beiden Astronauten eine so genannte Universalplattform an der Außenwand des russischen Servicemoduls Zvezda. Anschließend wird ROKVISS auf dieser Plattform montiert.
ROKVISS besitzt eine eigene Kommunikationseinheit über die während direkter Überflüge der ISS über Deutschland der Kontakt zur DLR-Bodenstation in Weilheim hergestellt wird. Diese Kommunikationseinheit (Sender, Empfänger und Antenne) wird an einem separaten Mast ebenfalls am russischen Sevicemodul befestigt. Kommunikationseinheit und Roboter müssen dann durch mehrere Kabel, welche die Astronauten ebenfalls verlegen, mit dem ROKVISS-Bordrechner im Inneren des russischen Servicemoduls verbunden werden.
{kind=link}
{kind=link}
Finanziert wird das Projekt vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) mit Mitteln des Bundesministeriums für Bildung und Forschung (BMBF). Die Hard- und Software wurde entwickelt und gebaut von EADS Space Transportation in Bremen als Hauptauftragnehmer und dem DLR-Institut für Robotik und Mechatronik in Oberpfaffenhofen, das für die Robotik-Komponenten und die Experimentdurchführung sowie die wissenschaftliche Auswertung der Ergebnisse verantwortlich zeichnet. Die Firma Kayser-Threde aus München war für Entwicklung und Bau des Experimentcomputers, die Stromversorgung und technische Unterstützung des DLR-Instituts zuständig. Das Unternehmen Hoerner & Sulger lieferte die Kameraausrüstung mit Elektronikzubehör. Das Management des Projekts erfolgt durch die Raumfahrt-Agentur des DLR. Die Durchführung der Mission basiert auf einer Vereinbarung zwischen der Raumfahrt-Agentur des DLR, den russischen Partnern, der Roscosmos und RKK Energija sowie dem Münchner Unternehmen Kayser-Threde als Hauptauftragnehmer für die S-Band-Kommunikationsinfrastruktur.
Die Kosten für das Experiment ROKVISS belaufen sich auf 11,5 Millionen Euro einschließlich 3,5 Millionen Euro für Start, Montage und Betrieb auf der ISS, die Deutschland an die russischen Vertragspartner zahlt.
Die Extra Vehicular Activity (EVA) wird im Internet auf NASA-TV am 26. Januar 2005 live übertragen.