Acht DLR-Institute arbeiten seit 01. Januar 2022 an einem Straßenverkehrssystem der Zukunft mit verteilter lernender Intelligenz zur Optimierung des Verkehrs.
Zentrale Ergebnisse sind unter anderem eine grundlegende Systemarchitektur für das vernetzte intelligente Verkehrssystem, Methoden und Technologien zur Mobilitätsdatenerhebung, Umfelderfassung und Ego-Lokalisierung von automatisierten und vernetzten Fahrzeugen.
Das DLR hat die Ergebnisse am Beispiel der Virtuellen Haltestelle, der Remote Operation und der fahrzeugexternen Lokalisierung von zu Fuß Gehenden und Radfahrenden praktisch erprobt.
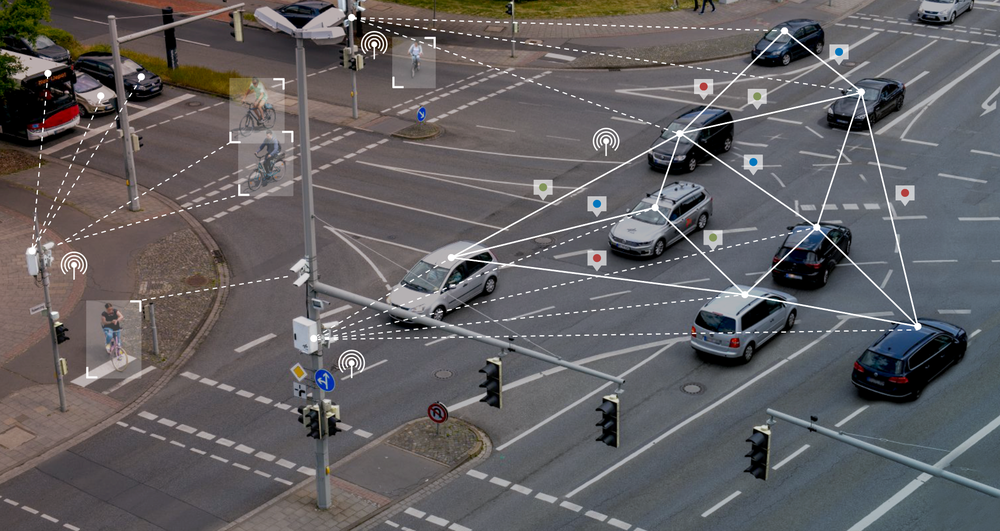
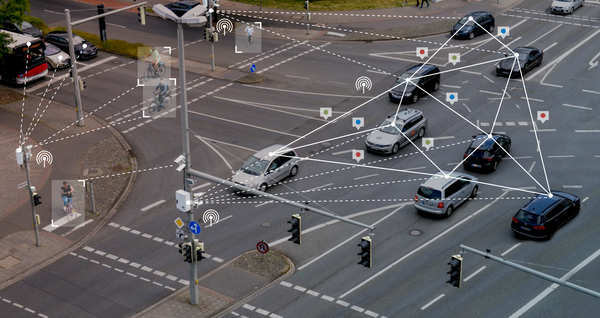
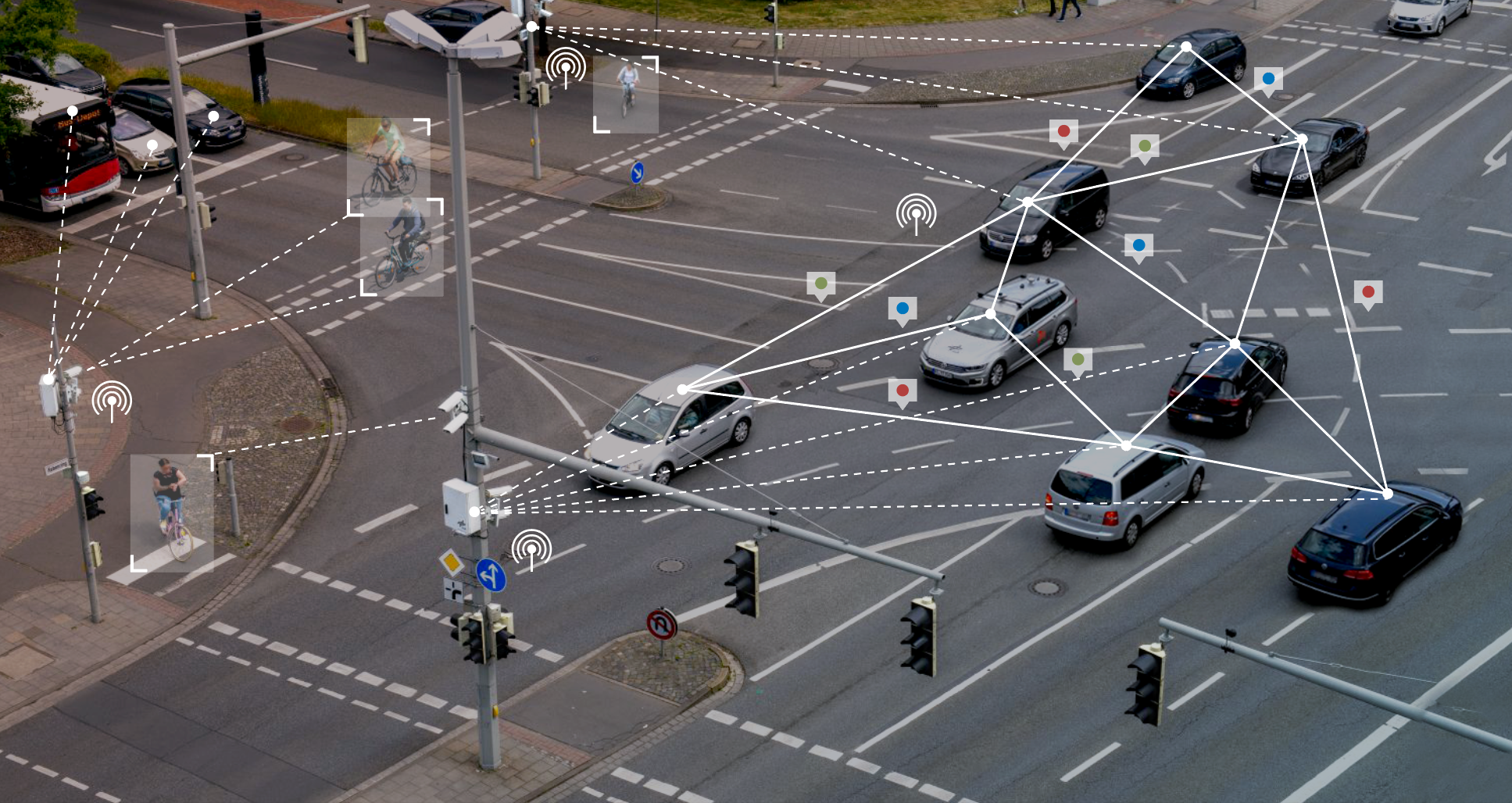
Automatisierte und vernetzte Fahrzeuge haben das Potential, einen leistungsfähigen, klimafreundlichen und bedarfsorientierten Personen- und Güterverkehr zu schaffen und die Mobilität nachhaltig zu verbessern. Sie stehen jedoch vor der Herausforderung, sich in komplexen Verkehrsszenarien mit zahlreichen anderen Fahrzeugen, zu Fuß Gehenden, Radfahrenden und sich dynamisch ändernden Verkehrsbedingungen zurechtzufinden. Die Unterstützung des automatisierten vernetzten Fahrzeugs von außen, zum Beispiel durch einen sogenannten Remote Operator oder durch zusätzliche Informationen aus der Infrastruktur, ist unerlässlich. Es kommt deshalb darauf an, ein funktionsfähiges Gesamtsystem aus zu Fuß Gehenden, Radfahrenden, Fahrzeugen, autonomen Shuttles und Infrastruktur zu gestalten. Dabei kann eine über das automatisierte und vernetzte Fahrzeug hinausgehende verteilte lernende Intelligenz zur Optimierung des Straßenverkehrssystems beitragen.
Wie muss ein solches System strukturiert sein? Wann sollte ein Remote Operator eingreifen? Wie kann der Wechsel von Verantwortlichkeiten zwischen dem automatisierten vernetzten Fahrzeug und einer Instanz außerhalb des Fahrzeugs sicher gestaltet werden? Für diese und weitere Fragen hat das Deutsche Zentrum für Luft- und Raumfahrt (DLR) im Projekt KoKoVI Antworten entwickelt.
Integration automatisierter Fahrzeuge in das gesamte Verkehrssystem
Die Forschenden haben im Projekt KoKoVI eine grundlegende Systemarchitektur für das vernetzte intelligente Verkehrssystem mit allen erforderlichen Komponenten und ihres Zusammenwirkens entwickelt. Mithilfe dieser Informationen können zukünftig Städte und Kommunen ihre Verkehrssysteme erweitern und fit für die Integration automatisierter Fahrzeuge machen.
Zudem hat das Projekt zahlreiche Methoden und Technologien aus den Bereichen Mobilitätsdatenerhebung, Umfelderfassung und Ego-Lokalisierung von automatisierten und vernetzten Fahrzeugen sowie der fahrzeugexternen Lokalisierung von zu Fuß Gehenden und Radfahrenden weiterentwickelt.
So ist beispielsweise ein umfangreicher Datensatz aus einer Messkampagne zusammen mit Fahrzeugen, Hubschraubern, Radfahrenden und Infrastruktur entstanden, der sehr viele reale Verkehrssituationen abdeckt. Dieser kann zukünftig zum Trainieren von Algorithmen in der Objekterkennung genutzt werden. Zusätzlich hat das DLR auch ein Verfahren entwickelt, wie die fahrzeugeigene Umfelderfassung Informationen von außen, zum Beispiel von einer Drohne, verarbeiten kann. Nicht zuletzt haben die Wissenschaftlerinnen und Wissenschaftler im Bereich der Ego-Lokalisierung Technologien weiterentwickelt, die die bisherige Lokalisierung basierend auf GNSS mit LiDAR-Informationen präzisiert oder sogar bei einem Ausfall von GNSS zuverlässige Informationen bereitstellt. Beides hat das Projekt in Echtzeitanwendungen in einem Forschungsfahrzeug integriert und umfangreich erprobt.
Neben der Weiterentwicklung von Methoden und Technologien ist dem DLR-Team die Erprobung im Rahmen eines intelligenten Gesamtsystems und der daraus entstehende zusätzliche Erkenntnisgewinn sehr wichtig. Deshalb hat es die Technologien am Beispiel der Virtuellen Haltestelle, der Remote Operation und der fahrzeugexternen Lokalisierung von zu Fuß Gehenden und Radfahrenden zu einem funktionierendem System zusammengeführt und auf dem Abschlussevent am 23. Oktober in Braunschweig gezeigt.
Zusammenspiel aus Fahrzeugen, Infrastruktur, zu Fuß Gehenden und Remote Operation erprobt
Bedarfsgerechte Mobilitätsangebote mit virtuellen Haltestellen und automatisierten Fahrzeugen spielen eine wichtige Rolle in der zukünftigen Mobilität. Dabei ist neben der Buchungsmöglichkeit für eine Fahrt mit einem On-Demand Shuttle auch die Nutzerführung hin zur virtuellen Haltestelle erfolgsentscheidend. Das Institut für Verkehrssystemtechnik hat hierzu eine Nutzerführung entwickelt, die den Weg zur virtuellen Haltestelle mithilfe von Augmented Reality-Anzeigen auf dem eigenen Smartphone erleichtert. Gleichzeitig werden die Routeninformationen auch mit einer Ampel koordiniert. Dadurch ist es möglich für den Nutzenden bedarfsgerecht die Ampel zu schalten und ein zügiges Erreichen der virtuellen Haltestelle zu ermöglichen.
Nutzende werden per App zur Digitalen Haltestelle hingeführt.
Darüber hinaus haben die Forschenden das Zusammenwirken eines automatisierten Fahrzeugs mit dem Leitstand eines Remote Operators gezeigt. Bei der Demonstration auf dem Abschlussevent benötigte ein Versuchsfahrzeug Unterstützung durch den Remote Operator bei der Umfahrung eines Hindernisses auf der Straße. Der Remote Operator hat zur Unterstützung Wegepunkte auf seinem Display gesetzt und zur Prüfung an die Fahrzeugautomation gesendet. Diese hat daraus einen entsprechenden Fahrweg berechnet und zur Freigabe zurück an den Remote Operator gesendet. Dieser hat den Fahrweg noch einmal überprüft und ihn freigegeben. So konnte das Versuchsfahrzeug das Hindernis erfolgreich umfahren.
Weiterentwicklung von Entwurfs- und Absicherungsmethoden für zukünftige Verkehrssysteme
Die Entwicklung und der Betrieb von Komponenten für vernetzte und intelligente Verkehrssysteme unterliegen strengen Qualitäts- und Sicherheitsanforderungen. Um ein sicheres und effizientes Zusammenwirken von automatisierten und vernetzten Systemen in zukünftigen Verkehrssystemen zu gewährleisten, hat das Institut für Systems Engineering für zukünftige Mobilität im Rahmen von KoKoVI bestehende Entwurfs- und Absicherungsmethoden weiterentwickelt. So erweiterten die Forschenden unter anderem eine Methode zur Bewertung von Mensch-Maschine-Schnittstellen um eine Möglichkeit zur Berücksichtigung von Unter- bzw. Überforderung und lieferten Feedback für die Optimierung des Remote Operation-Leitstands durch das Institut für Verkehrssystemtechnik. Gleichzeitig wendeten sie eine etablierte Methode zur Identifikation und Minimierung von Automationsrisiken (vgl. PEGASUS, SET Level, VVM) zur Absicherung von beispielhaften Perzeptionsketten an. Die von den beteiligten Wissenschaftlerinnen und Wissenschaftlern entwickelte und modellierte KoKoVI-Systemarchitektur dient als „Blaupause“ für den Entwurf zukünftiger Verkehrssysteme. Sie kann zukünftig als Grundlage für die Erstellung von Leitfäden für Städte und Kommunen verwendet werden, um diese bei der Einführung automatisierter Mobilitätsdienste zu unterstützen. Weitere Projektaktivitäten umfassten die Entwicklung und Evaluation von parametrisierbaren Fahrstilen zur Gewährleistung eines komfortablen Fahrverhaltens sowie die Entwicklung von Methoden für die Synthese von „Safe-by-Design“-Strategien für automatisierte Fahrzeuge.
Demonstration von Entwurfs- und Absicherungsmethoden
Im Zeitalter der selbstfahrenden Autos ist das Sammeln von Informationen über die Umgebung entscheidend für die Lokalisierung und das Situationsbewusstsein der autonomen Fahrzeuge. Moderne Autos sind oft bereits mit zahlreichen Sensoren ausgestattet, um diesen Bedarf zu decken. Dennoch sind ihre Fähigkeiten durch den eigenen Erfassungshorizont oft begrenzt. Durch die Vernetzung mit anderen intelligenten Fahrzeugen oder einer Infrastruktur können Fahrzeuge die Wahrnehmung der Umgebung wesentlich verbessern. Wenn diese Optionen nicht verfügbar sind, können mobile Road Side Units (RSUs), wie Drohnen mit Sensoren, eine Lösung für die gemeinsame Wahrnehmung bieten. Solche mobilen RSUs können autonome Fahrzeuge durch anspruchsvolle Situationen wie Baustellen führen oder in Unfall- oder Katastrophengebieten Unterstützung leisten.
In diesem Projekt hilft das Institut für Flugsystemtechnik autonomen Fahrzeugen, deren Umgebungswahrnehmung durch die Perspektive von oben zu erweitern. Ein UAS (Unmanned Aerial System), das mit Kamerasystemen ausgestattet ist, positioniert sich über einer Kreuzung mit einem Unfall, findet und klassifiziert die unten befindlichen Objekte und stellt diese Informationen für autonome Fahrzeuge zur Verfügung. Die Autos können die Hindernisse, die sonst für ihre Sensoren unsichtbar sind, durch Drohnendaten ergänzen und in ihre Planung einfließen lassen. Das sorgt für eine sichere und effiziente Durchquerung von Pannen- und Unfallstellen.
Ein Eindruck von Testversuchen: Weißer PKW - automatisierter, schwarzer PKW - statisches Fahrzeug.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}