



{kind=link}
{kind=link}
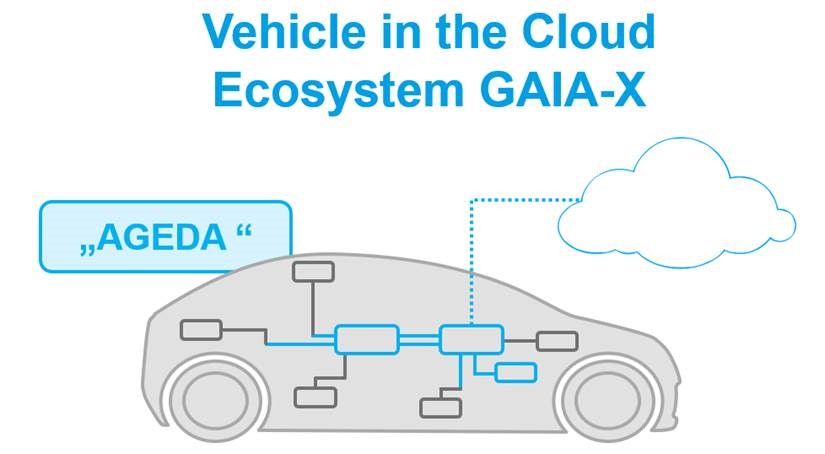
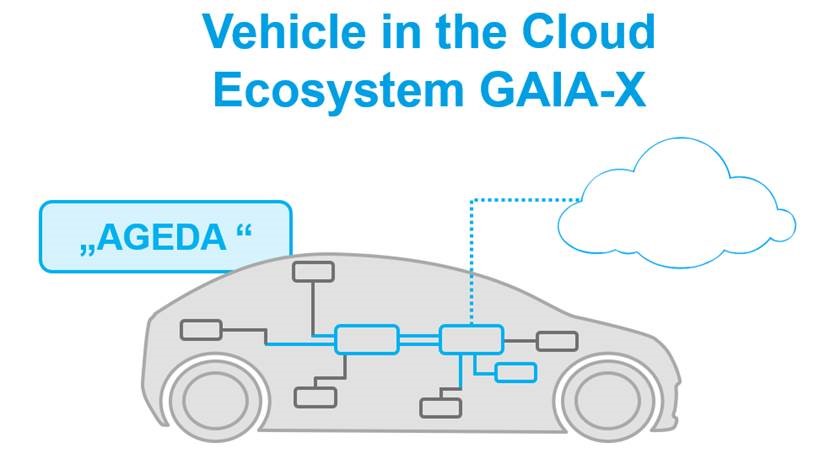
Digitalisierter Straßenverkehr
Unsere Abteilung Digitalisierter Straßenverkehr gestaltet aktiv den digitalen Zwilling des Verkehrssystems – mit besonderem Fokus auf den Straßenverkehr. Ziel ist es, einen offenen und barrierefreien Zugang zu allen relevanten Daten und Technologien zu ermöglichen – diskriminierungsfrei, föderiert und vernetzt. Auf dieser technologischen Grundlage entwickeln wir intelligente digitale Dienste, die über alle Ebenen des [...]