Successful interaction between rover, lander and sensor units
July 4, 2017 | ROBEX mission in the simulated Moon environment of Mount Etna comes to an end
Successful interaction between rover, lander and sensor units
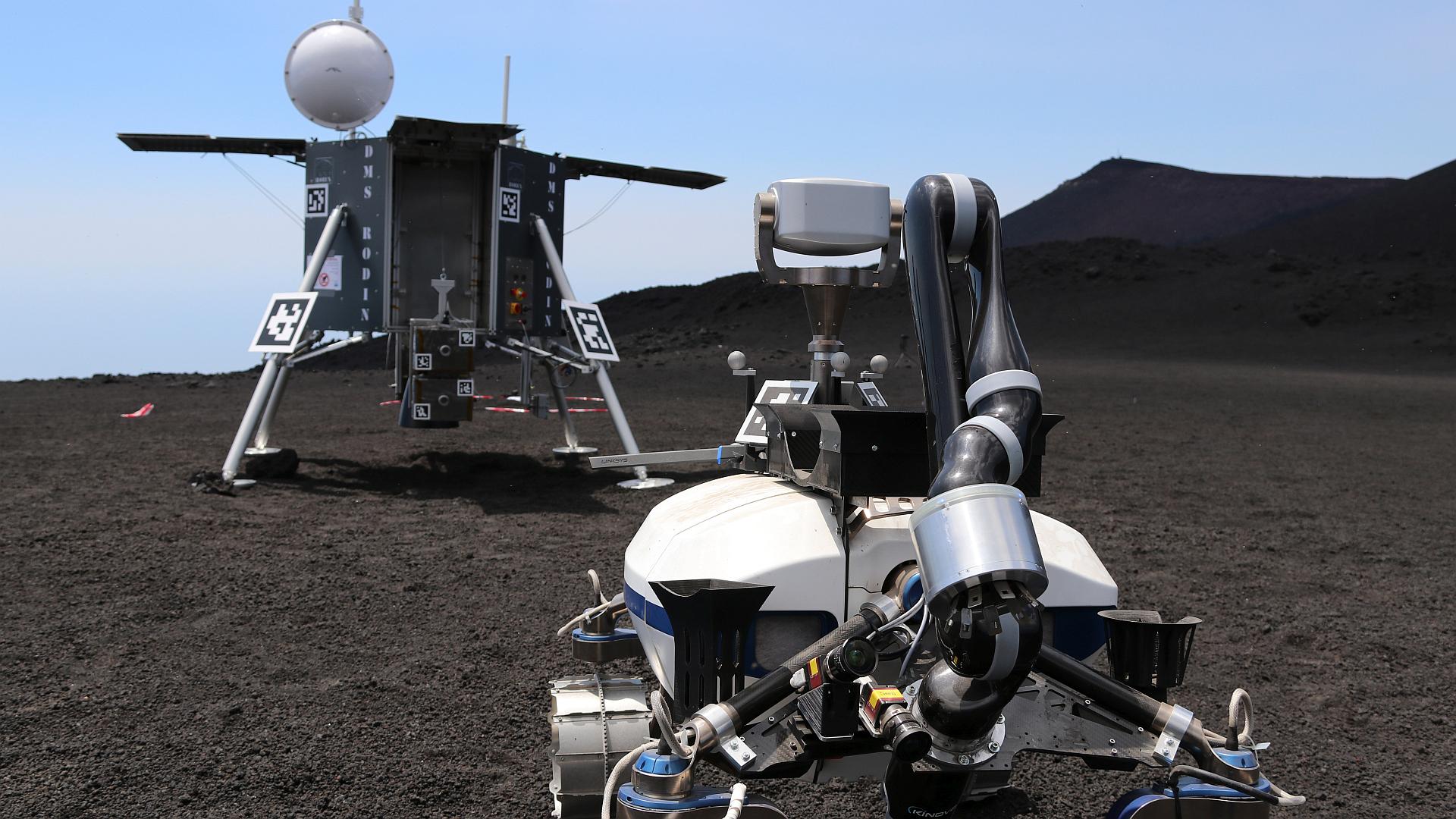
Lander in view
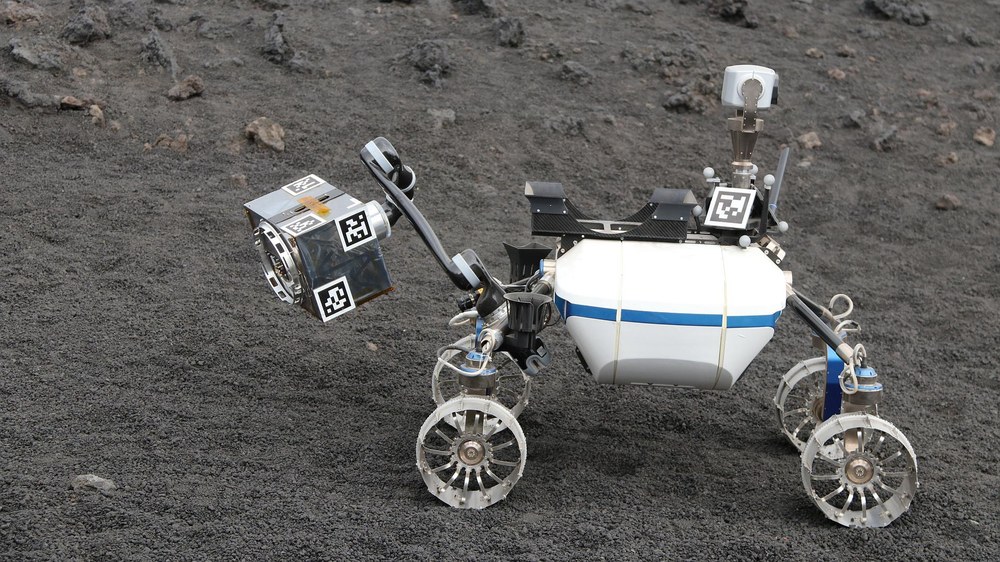
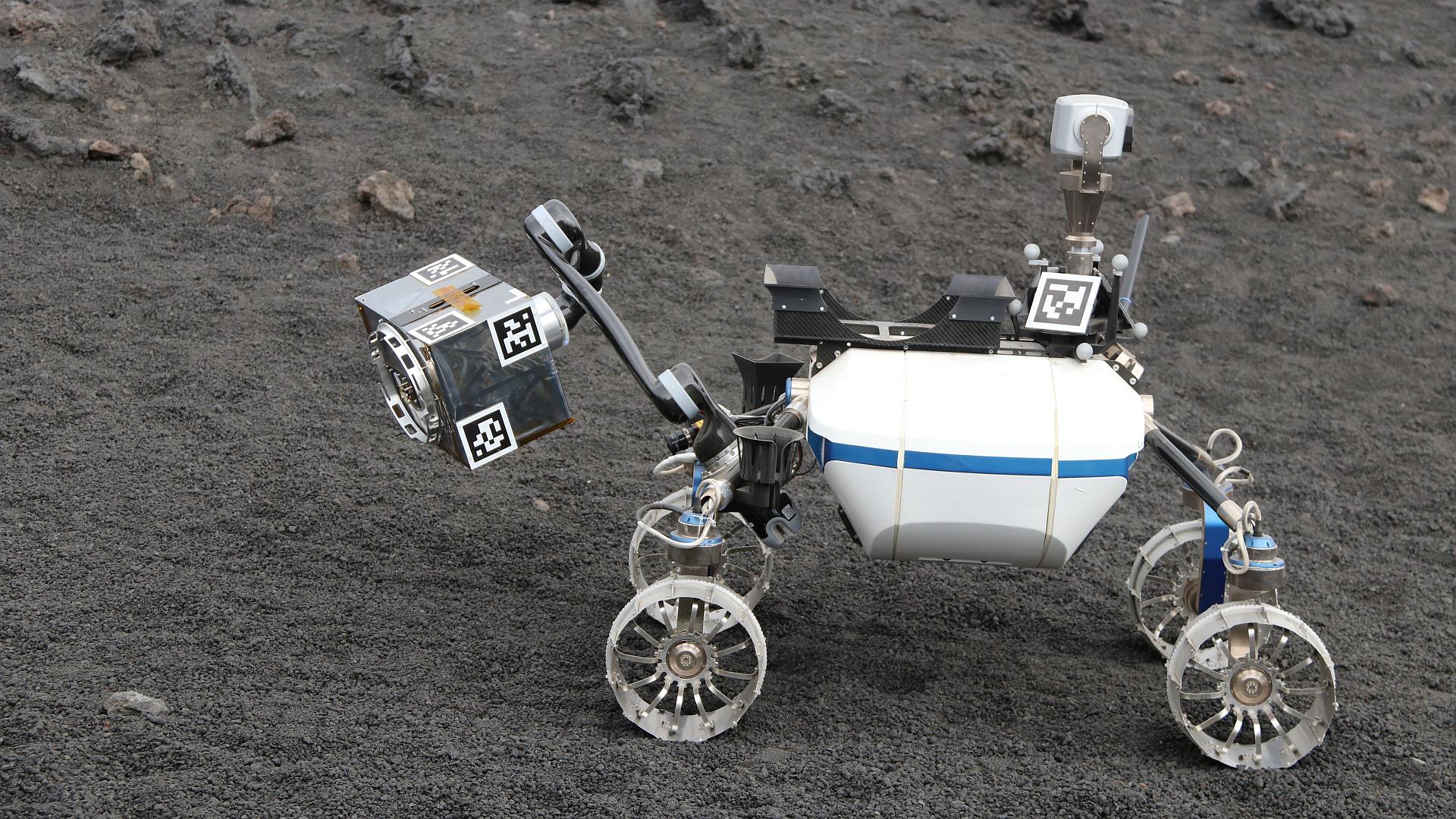
To find its way to the lander, Rover LRU-2 (Lightweight Rover Unit) created a map of the environment during the ROBEX project with the help of its camera eyes.
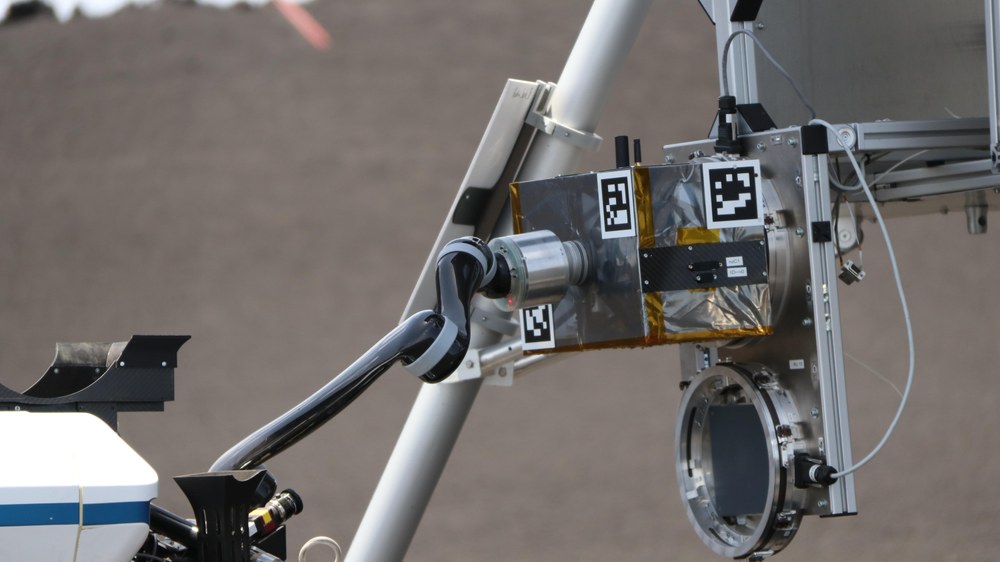
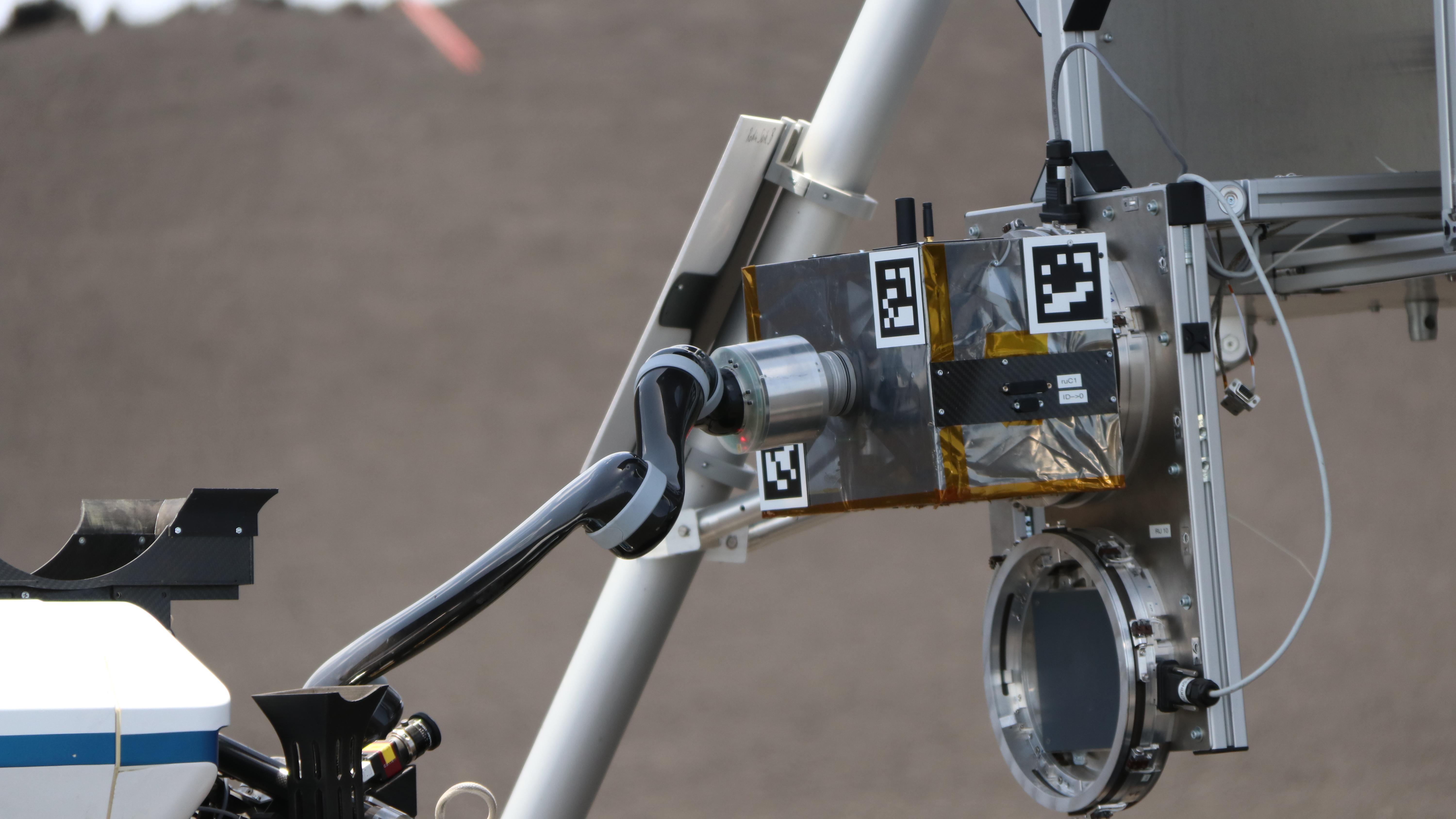
Working autonomously: Rover LRU-2 using the sensor unit
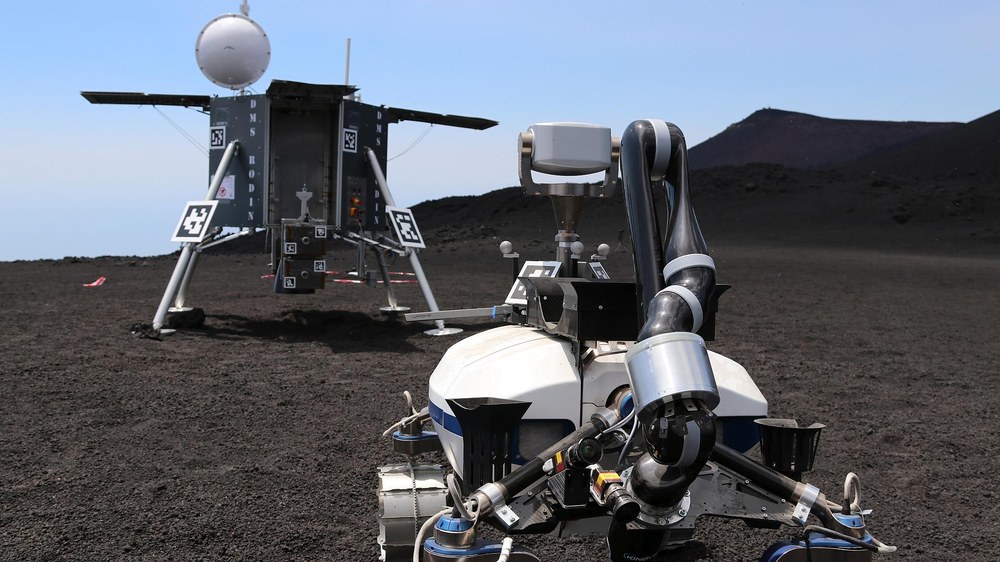
One of the objectives of DLR's demonstration mission on Mount Etna is that Rover LRU-2 autonomously takes the sensor unit, that is attached to the RODIN lander.
Rover LRU-2 navigates autonomously to the specified location where the sensor units for seismic measurements are to be stored. During project ROBEX, lander, rover and sensor units communicate with each other and carry out the exploration of unfamiliar celestial bodies autonomous.
Demonstration mission on Mount Etna: the volcano becomes a lunar landscape for the Helmholtz Alliance ROBEX (Robotic Exploration under Extreme Conditions).
Five DLR institutes develop and test technologies for autonomous exploration of inaccessible regions.
Focus: aerospace; robotics; planetary research
It looks simple: the rover heads straight for the landing craft, uses a gripper arm to remove a sensor unit from the loading bay and takes it quickly to the determined deposit location, where seismic measurements are then carried out. Everything takes place without human intervention, as the rover, lander and sensor unit complete their job autonomously and effectively. But behind this apparent ease are five years of hard work, during which the team from the Helmholtz Alliance ROBEX (Robotic Exploration under Extreme Conditions) laboured assiduously to make the vision of autonomous planetary exploration come true. And they succeeded on the Sicilian volcano of Mount Etna and its Moon-like lava landscape: "We managed to prove that this technology can also be used on future exploratory missions," says deputy spokesperson of the ROBEX Alliance, Armin Wedler, from the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR).
In this case, the engineers and scientists used Mount Etna a Moon analogue: with its granular, crumbly surface, regular tremors at a depth of up to 600 kilometres and lava layers of varying thickness, the volcanic landscape is quite similar to that of Earth's lunar companion. The team from five DLR institutes spent four weeks in total on Mount Etna, transporting their experiments from the laboratory to the sometimes inordinately harsh reality with its gusty winds, rock falls and precipitous switches between Sun and fog. "We worked every day toward completing the full demonstration," says ROBEX scientific coordinator Martina Wilde from the Alfred Wegener Institute (AWI) describing the test campaign.
Creating autonomy on unfamiliar celestial bodies
The autonomous functions of the rover, lander and sensor units were key to the success of the mission. "If we want to conduct research at inaccessible locations with extreme environmental conditions, for instance on the Moon, it will not be possible to intervene in real time – be it in the control room or on site," explains Wedler from the DLR Robotics and Mechatronics Center. "So our goal was for the rover to use its camera eyes to scan the environment and to plan its route autonomously." In this scenario, the RODIN lander assumes the role of the stationary unit, responsible for power supply and data connectivity between the control room, the rover and the sensor units. The positioning of four sensor units equipped with internal seismometers on the Moon might in future enable the first identification of the satellite's interior structure and the composition of the upper regolith layers.
Several DLR institutes collaborated and contributed their expertise to the implementation of this ambitious mission: the DLR Robotics and Mechatronics Center was in charge of the rover, while the DLR Institute of Space Systems provided the lander and the sensor units, and the DLR Institute of Composite Structures and Adaptive Systems developed the structure of the sensor units. In addition, DLR Space Operations and Astronaut Training enabled the communication infrastructure on the ground, and the DLR Institute of Planetary Research conducted the seismic measurements.
Collaboration between deep sea and space research
ROBEX also entailed the first cooperation between scientists and engineers from deep sea and space disciplines. "Both groups encounter inaccessible regions subjected to extreme conditions in the course of their research," says Wilde. "In deep-sea environments, for instance, the aggravating factors are the darkness and the water itself, while space research faces microgravity and radiation." But a common feature of both regions is that navigation, power supply and data communication present major challenges. This is why the research included 16 institutions, and involved setting up a joint demo mission that confirmed successful deployment of the newly developed technologies for both areas in the respective settings. So in addition to the Etna campaign for the space researchers, their deep-sea colleagues will also initiate a mission on 22 August 2017 to test several robotic systems off Svalbard in the Arctic region.

{kind=link}
{kind=link}
{kind=link}