
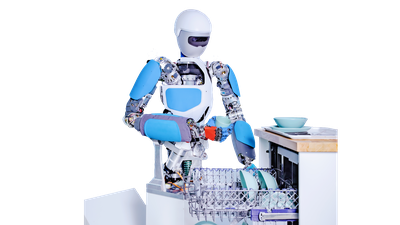
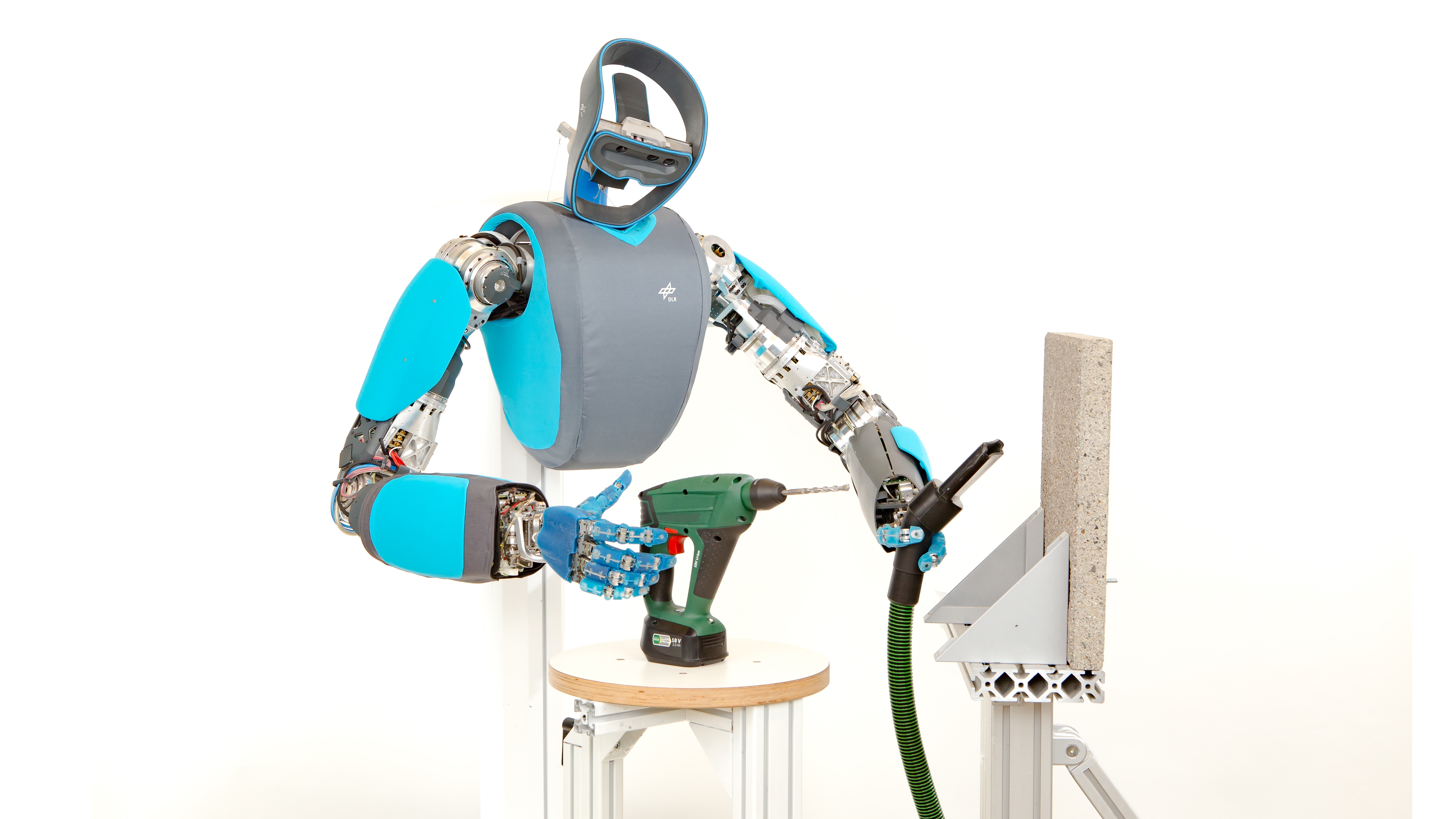
David
Größe: | erwachsener Mensch |
Gewicht: | ca. 55 kg |
Freiheitsgrade: | 44 |
Aktuierung: | 83 bürstenlose Gleichstrommotoren |
Sensorik: | 173 Positionssensoren |
Geschwindigkeit: | vergleichbar mit der des Menschen |
Arbeitsraum: | vergleichbar mit dem des Menschen |
Besonderheiten: |
|


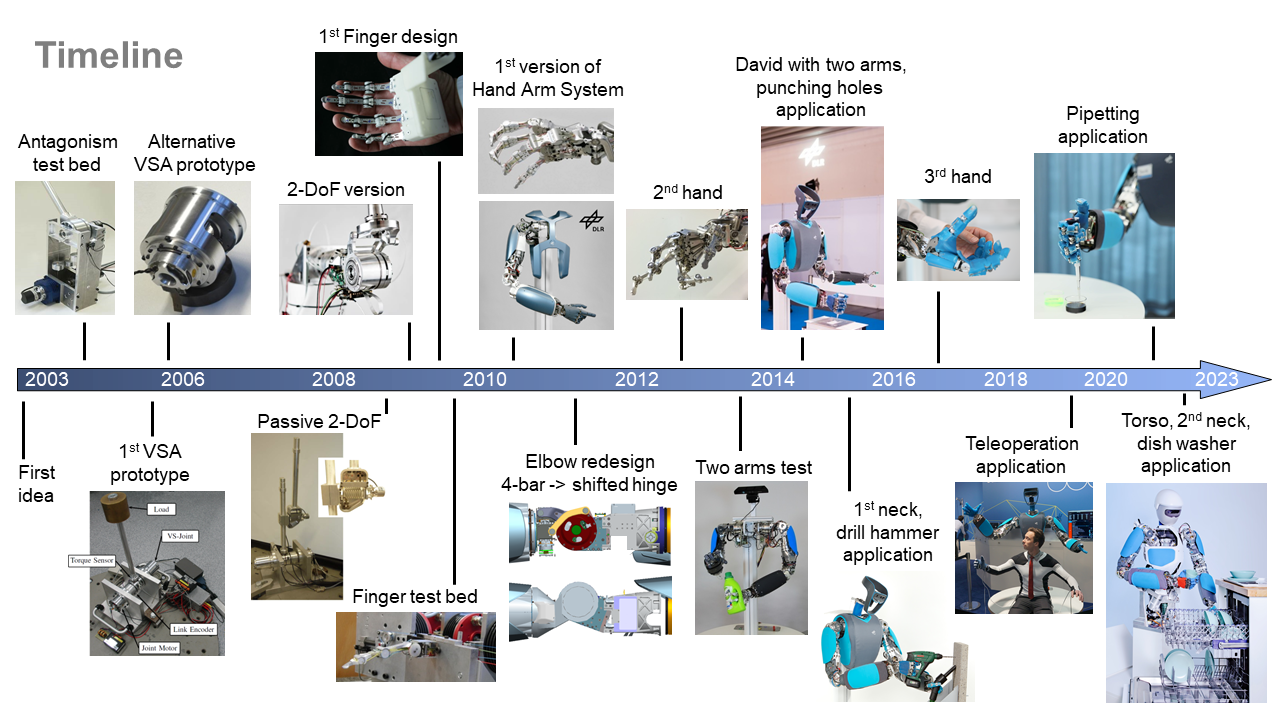

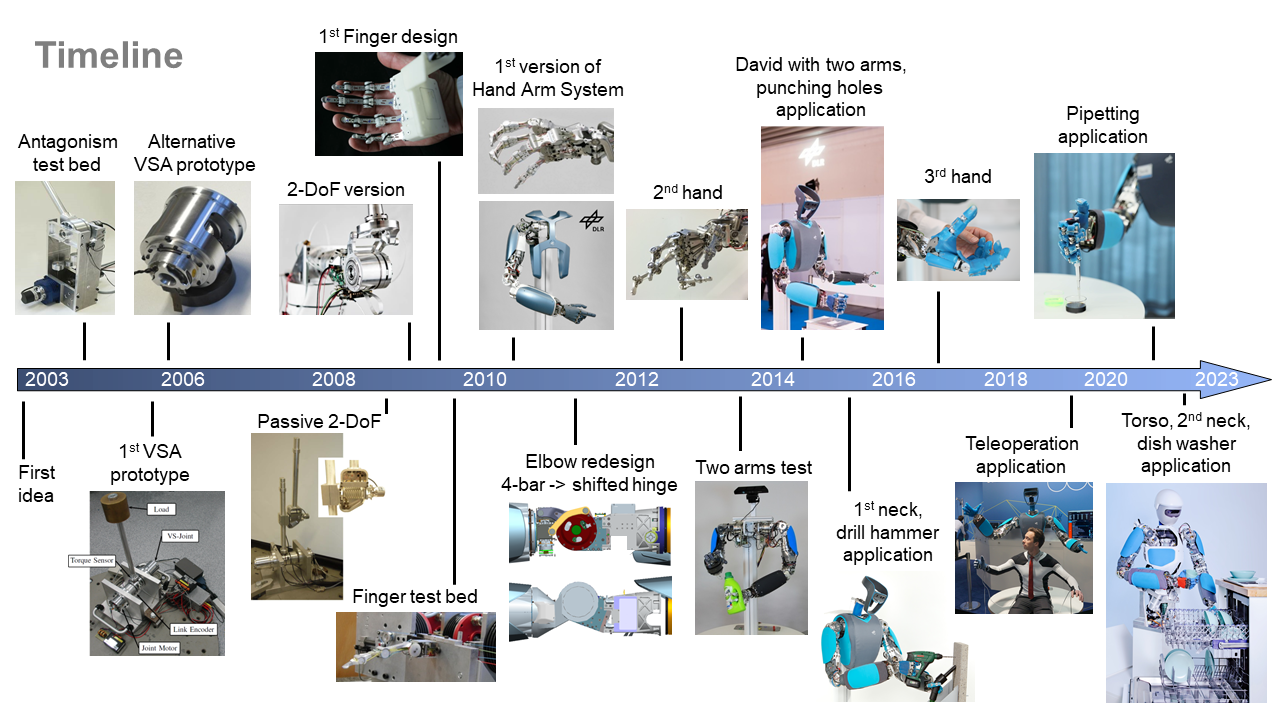
Die Entwicklung von David
David in Form eines vollständigen humanoiden Oberkörpers ist das Ergebnis konsequenter Forschung und Entwicklung. Ausgehend von den ersten Ideen für Aktoren mit variabler Steifigkeit wurden Prototypen, mehrere Generationen von Händen und Körperkomponenten entwickelt. Vor dem Hintergrund der langfristigen Vision eines geschickten und robusten Serviceroboters veränderte sich der Fokus von den technologischen Grundlagen zu den Fähigkeiten und schließlich zu den Anwendungen.
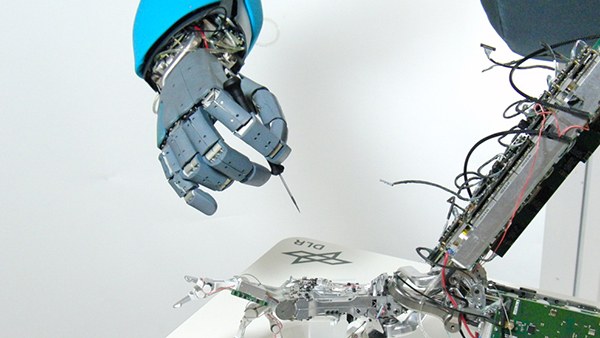
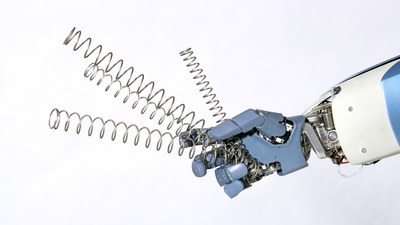
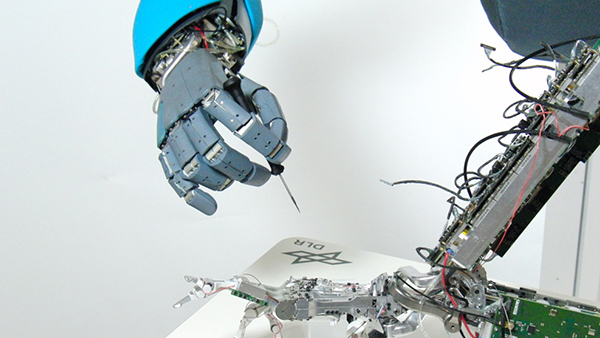
David AWIWI Hand
Fünf-Finger-Hand mit hoher Geschicklichkeit und Feinmotorik.

{kind=link}
{kind=link}
{kind=link}
David
Test
{kind=link}