
OPERA

Credit:
PR
Laufzeit: | 2022-01-01 bis 2024-12-31 |
Projektpartner: | |
Anwendungsfeld: | Industrielle Fertigung |
Förderung: | Bayerisches Staatsministerium für Wirtschaft, Landesentwicklung und Energie, Fördernummer DIK0374 |
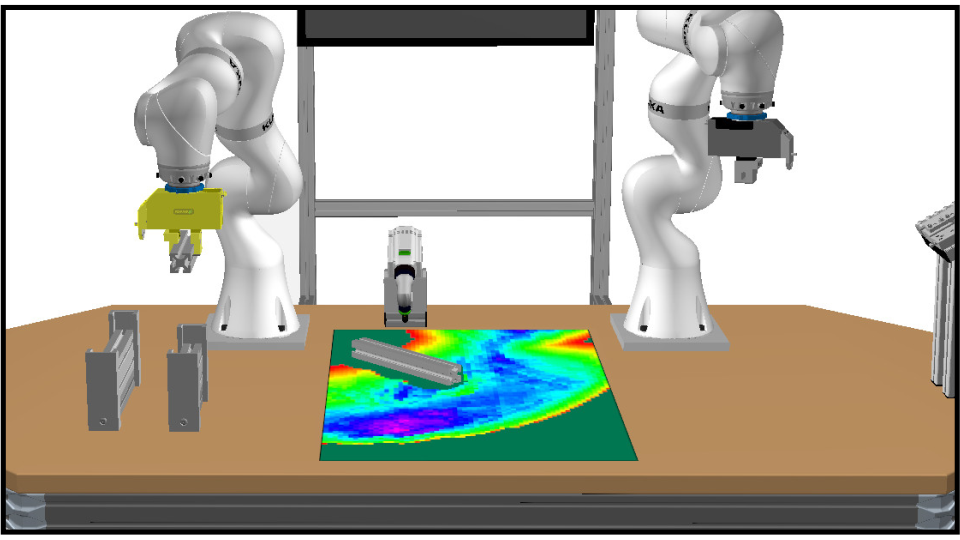
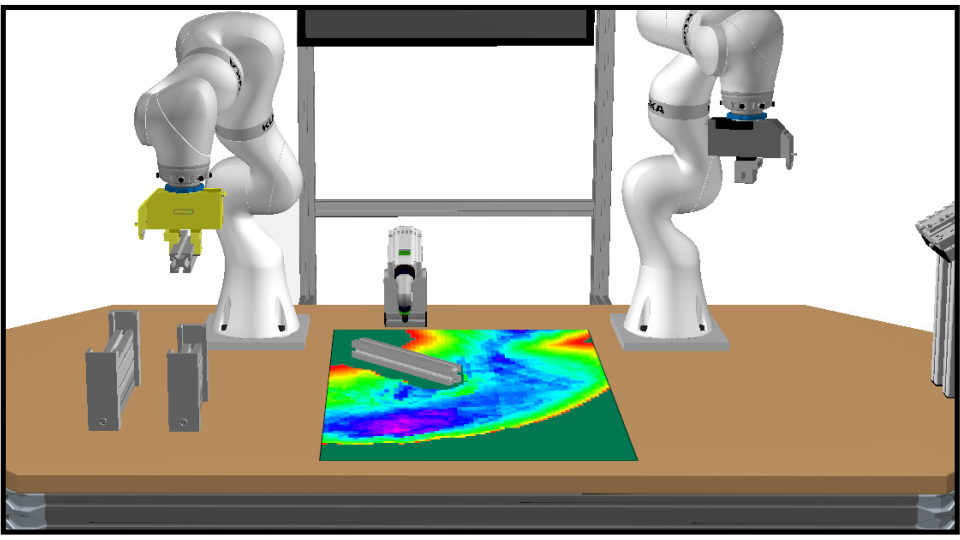
Projektion der Erreichbarkeit des Roboters auf den Tisch
Projection of the overlapping workspace for two KUKA iiwa LBRs
{kind=link}