dSpace-Force-Feedback-Joystick
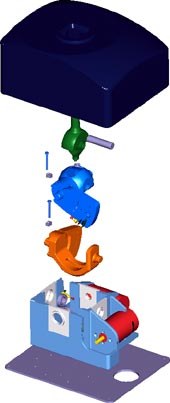
Das Design ermöglicht den Aufbau der Joystick-Mechanik auf sehr kompaktem Raum mit einer geringen Anzahl von Teilen (die meisten davon im Rapid-Prototyping-Verfahren hergestellt), sodass das System auf einem Schreibtisch verwendet oder leicht in andere Arbeitsumgebungen (Sitze, Steuerpulte) integriert werden kann.
Die Mechanik des Force-Feedback-Joysticks besteht aus einer kardanischen Gelenklösung, die von zwei bürstenbehafteten Gleichstrommotoren über Seilzüge angetrieben wird. Die Lösung ermöglicht einen Arbeitsbereich auf beiden Achsen von ± 20° und Kräfte auf den Griff bis zu 10N.
Die Qualität der verwendeten Aktuatoren, die hohe Auflösung des Positionsmesssystems (an die Motorwelle gekoppelte optische Encoder) und die Schnittstelle zur Steuerplatine ermöglichen eine hohe Bandbreite (bis zu 5 kHz) der Kraftrückmeldung.
Die Regelungsalgorithmen sind auf einer PC-basierten DSP-Karte DS1102 von dSpace unter Verwendung des Signalprozessors Texas Instruments TMS 320C31 implementiert. In dieser Version erfolgt die Kommunikation zwischen dem Host-PC und dem DSP-Board über ein Dual-Port-Memory. Für die Entwicklung der Steuerungssoftware können alle dSpace-Software-Prototyping-Tools verwendet werden.
Da die verwendeten Zahnräder kein Spiel und nur eine sehr geringe Reibung aufweisen, ist die ausgeübte Kraft proportional zum aktuellen Befehl. Um dies zu überprüfen, wird für jede Joystick-Hardware eine präzise Kraftkalibrierung durchgeführt.
Technische Daten
| | |
|---|
Maximale Kraft | 10 N |
Maximales Drehmoment | 1,2 Nm |
Getriebeübersetzung | 20:1 |
Positionsauflösung | 0.017 ° |
Material | PU |
Abmessungen | 185 x 153 x 250 mm |
Versorgungsspannung | 24 V DC |
Maximale Leistung | 2 x 30 W |
System-Bandbreite | 10 Hz |
Frequenz der DSP-Regelschleife | 5 kHz |
Regelkreisfrequenz | 40 kHz |
Anwendungen
- Mensch-Maschine-Schnittstelle für eine Teleroboter-Anwendung unter Verwendung eines KUKA-Roboters vom Typ KR6 zur Konturverfolgung mit Force-Feedback-Unterstützung. Die Kräfte auf den Werkzeugmittelpunkt des Roboters werden mit dem nachgiebigen 6-DoF-Kraft-Momenten-Sensor des DLR gemessen.
- Mensch-Maschine-Schnittstelle für die Steuerung medizinischer Simulationsmodelle eines abdominalen Bereichs mit elastischen Strukturen.
- Steer-By-Wire: Mensch-Maschine-Schnittstelle für Fahrzeuglenkung mit Kraftrückkopplung in einem Hardware-in-the-Loop-Simulator für Steer-by-Wire-Subsysteme und Regelungsalgorithmen