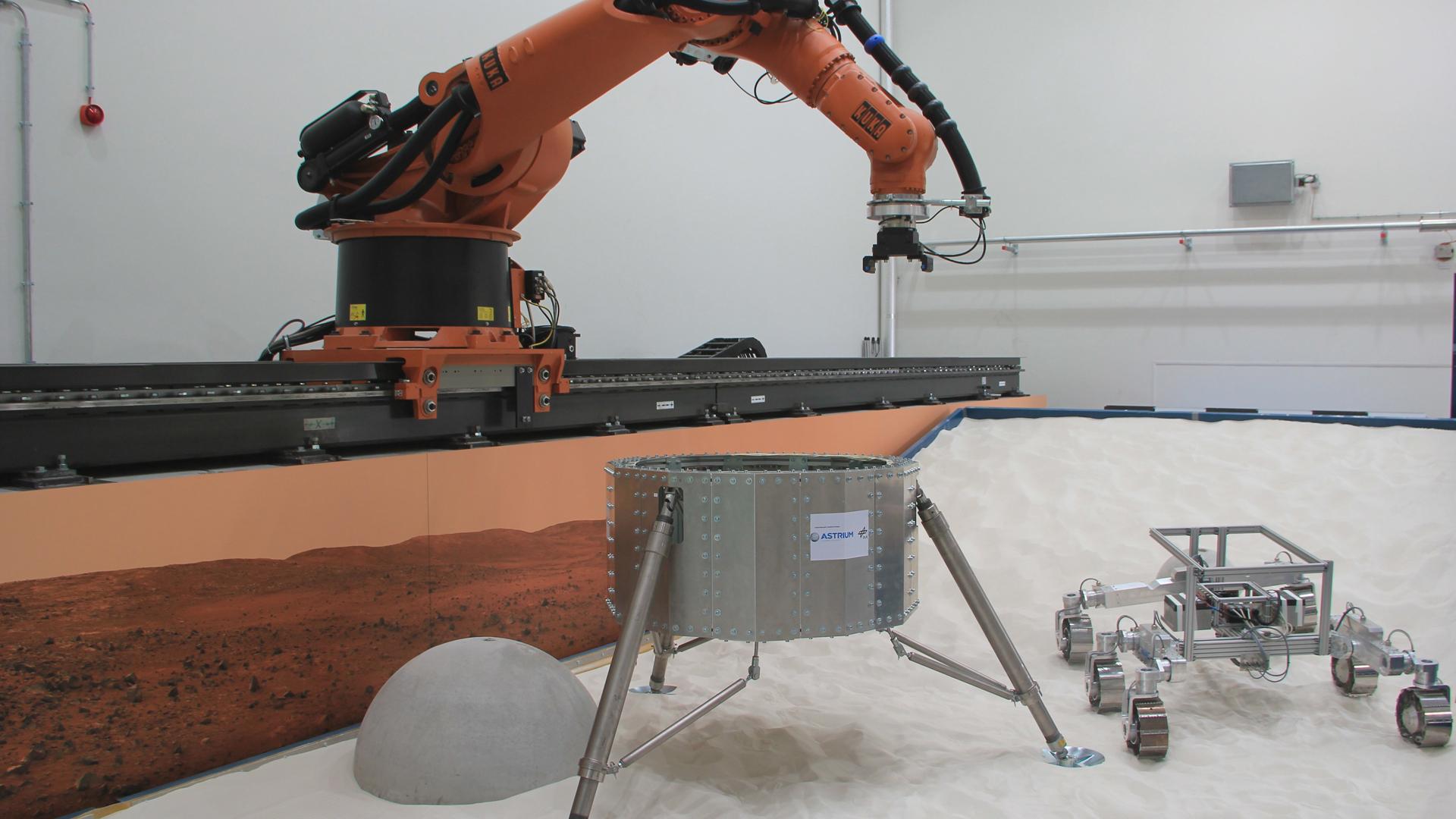
Lander Engineering Model (LEM) am Roboter (KR500) bereit für einen Abwurf Test
Zur Unterstützung von Entwicklungsaktivitäten zu Landesystemen ist beim DLR-Institut für Raumfahrtsysteme in Bremen ein modulares Testbett aufgebaut. Ziel ist die Untersuchung des Aufsetzverhaltens von Landesystemen bei realistischer Simulation von Gewicht, Dynamik und planetarer Oberfläche, um daraus Erkenntnisse ableiten zu können, die beispielsweise bei der Landung auf einen Planeten relevant sind.
Zur Unterstützung von Entwicklungsaktivitäten zu Landesystemen ist beim DLR-Institut für Raumfahrtsysteme in Bremen ein modulares Testbett aufgebaut. Ziel ist die Untersuchung des Aufsetzverhaltens von Landesystemen bei realistischer Simulation von Gewicht, Dynamik und planetarer Oberfläche, um daraus Erkenntnisse ableiten zu können, die beispielsweise bei der Landung auf einen Planeten relevant sind.
Zur Unterstützung von Entwicklungsaktivitäten zu Landesystemen ist beim DLR-Institut für Raumfahrtsysteme in Bremen ein modulares Testbett aufgebaut. Ziel ist die Untersuchung des Aufsetzverhaltens von Landesystemen bei realistischer Simulation von Gewicht, Dynamik und planetarer Oberfläche, um daraus Erkenntnisse ableiten zu können, die beispielsweise bei der Landung auf einen Planeten relevant sind.
Landeverhalten auf Planeten im Labor testen
Die Großforschungsanlage des Deutschen Zentrums- für Luft- und Raumfahrt (DLR) bildet ein modulares Testbett von einer Größe von 10 x 4 Metern. Die Anlage bietet eine nachgebildete Planetenoberfläche, die mit granularem Bodenmaterial und wählbaren Steinverteilungen gestaltet ist. Ferner ist das Gelände beziehungsweise die Anlage in Teilen neigbar (bis 30 Grad), um Landungen am Hang beziehungsweise Roverfahrten an Steigungen und Gefällen simulieren zu können. Weiteres Kernelement der Anlage ist ein fahrbares Industrierobotersystem mit einer Traglast von 500 Kilogramm, welches zur präzisen Führung der Testobjekte dient.
Landetestobjekte können mit vordefinierten Geschwindigkeiten und Lagewinkeln als „Droptest“ abgeworfen werden. Alternativ können sie zudem durch eine permanente Kopplung zum Robotersystem auch gewichtsentlastet bewegt werden, um die geringere Anziehungskraft fremder Himmelskörper zu simulieren. Ergänzend zu diesen Testmodi auf Systemebene können auch Komponententests mit einzelnen Landebeinen durchgeführt werden.
Wichtige Fragen betreffen die Umkippstabilität bei Landungen am Hang beziehungsweise bei seitlicher Geschwindigkeitskomponente als auch die Landesicherheit in rauem Gelände. Diese Fragen entziehen sich teilweise einer zuverlässigen numerischen Simulation auf Grund der schlechten Beschreibbarkeit des Verhaltens des granularen Oberflächenmaterials während der dynamischen Bewegungsphasen.
Kontakt
Volker Speelmann
Leitung Forschungsinfrastrukturen
Deutsches Zentrum für Luft- und Raumfahrt (DLR)
Vorstandsbereich Innovation, Transfer und wissenschaftliche Infrastrukturen



{kind=link}
{kind=link}