Numerous boulders, many rocks, no dust: MASCOT's zigzag course across the asteroid Ryugu
October 12, 2018
Numerous boulders, many rocks, no dust: MASCOT's zigzag course across the asteroid Ryugu
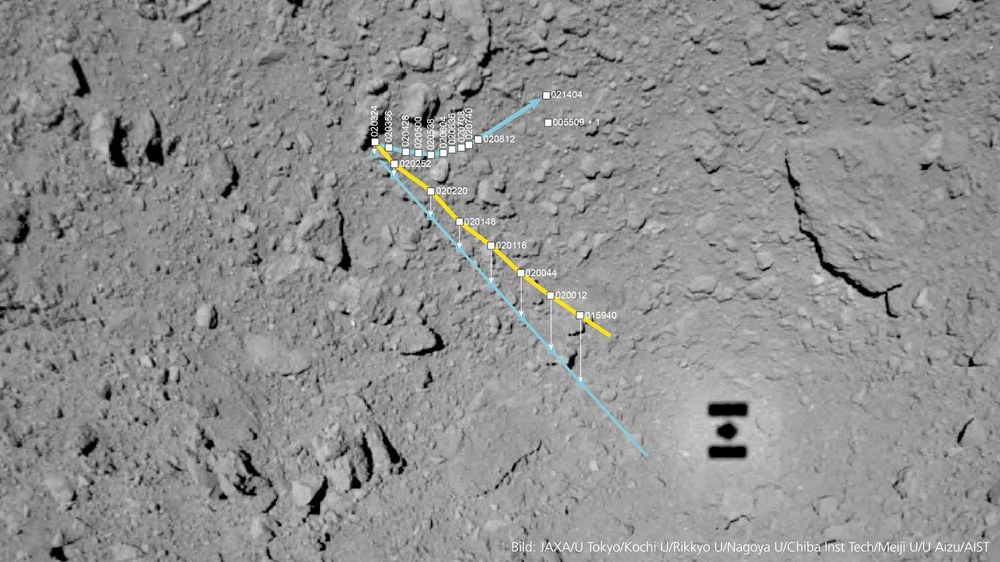
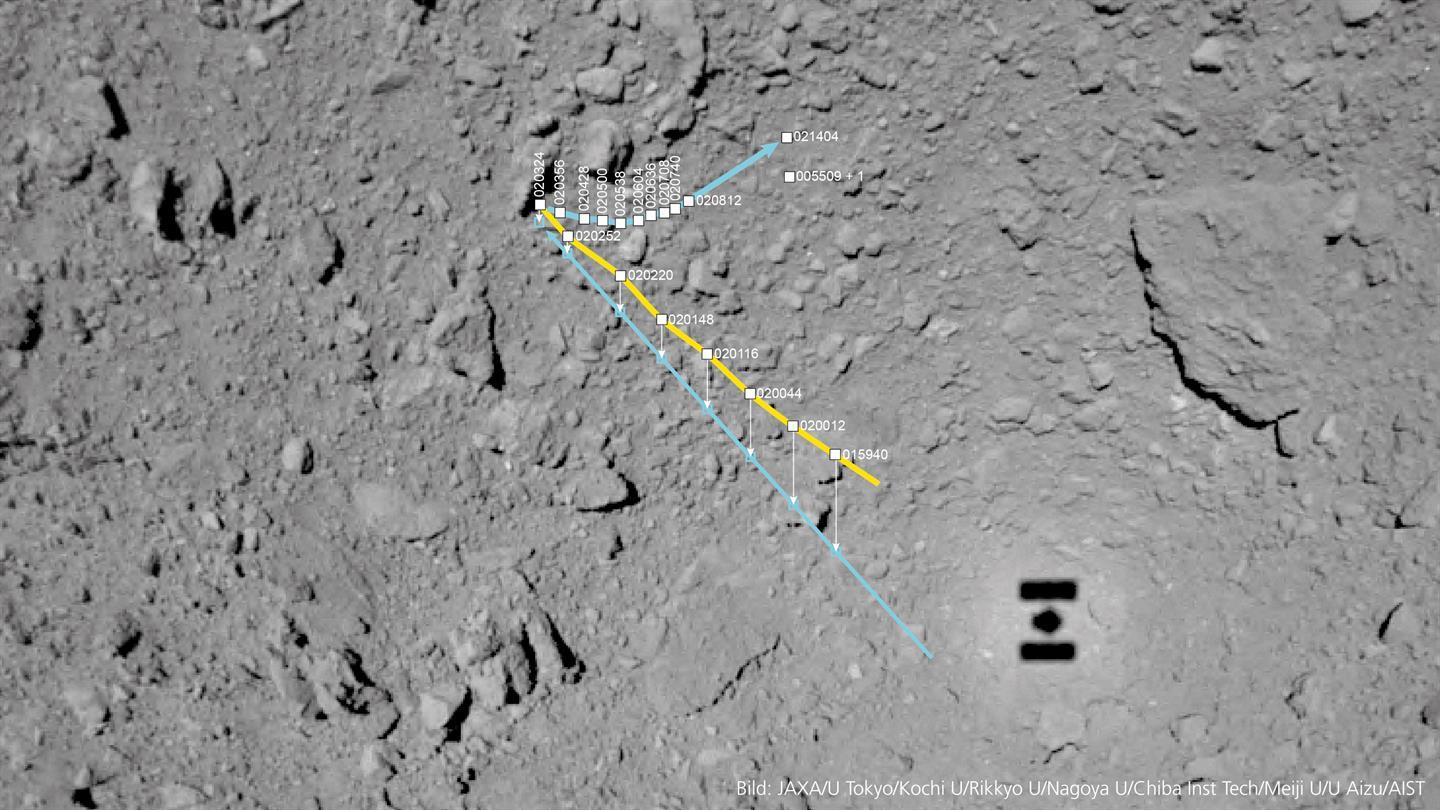
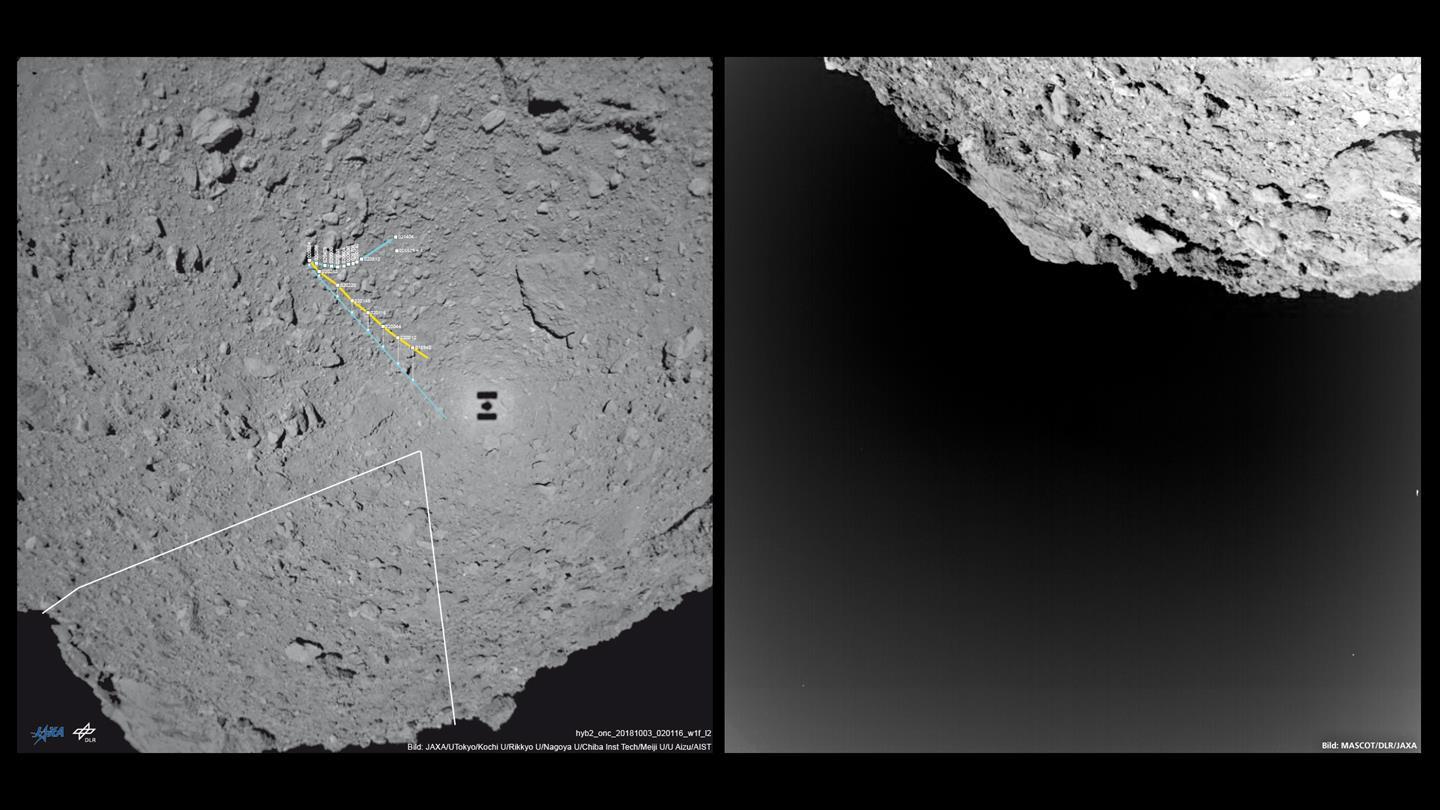
MASCOT's approach to Ryugu and its path across the surface
After MASCOT had separated from its mothercraft, Hayabusa2's ONC (Optical Navigation Camera) recording system, with its three cameras, began following MASCOT’s descent to the asteroid Ryugu from a height of 51 metres. The image section is oriented to the north, and the area shown is located at approximately 300 degrees east and 30 degrees south. Hayabusa2’s shadow can be seen on the lower right. At the time of the separation, it was about noon on Ryugu and the Sun was behind Hayabusa2 – the shadow is about six by 4.5 metres. The points indicate the times at which Hayabusa2 acquired images of MASCOT. The times are in UTC (Coordinated Universal Time, CEST minus two hours), the first image was acquired at 01:59 and 40 seconds UTC (03:59:40 CEST). The yellow line indicates the locations at which MASCOT was still descending towards Ryugu and where it could be identified in the ONC photos. The blue line below the yellow line is the projection of these positions onto the asteroid surface – so this shows MASCOT's flight route was rather straight, and the lander touched down on a large edgy block at around 02:23 and 24 seconds UTC. From there, the asteroid lander hopped along the curved horizontal line towards the east-northeast and was then repeatedly imaged by the ONC. At around 02:14 and 04 minutes UTC MASCOT came to rest at its first location on the asteroid. Meanwhile, Hayabusa2 ascended to a higher observation position over Ryugu, making it more difficult to identify MASCOT in the images due to the lower image resolution. On the second asteroid day, MASCOT's mobility mechanism was activated. Another image will show the lander on 4 October at 00:55 and nine seconds UTC.
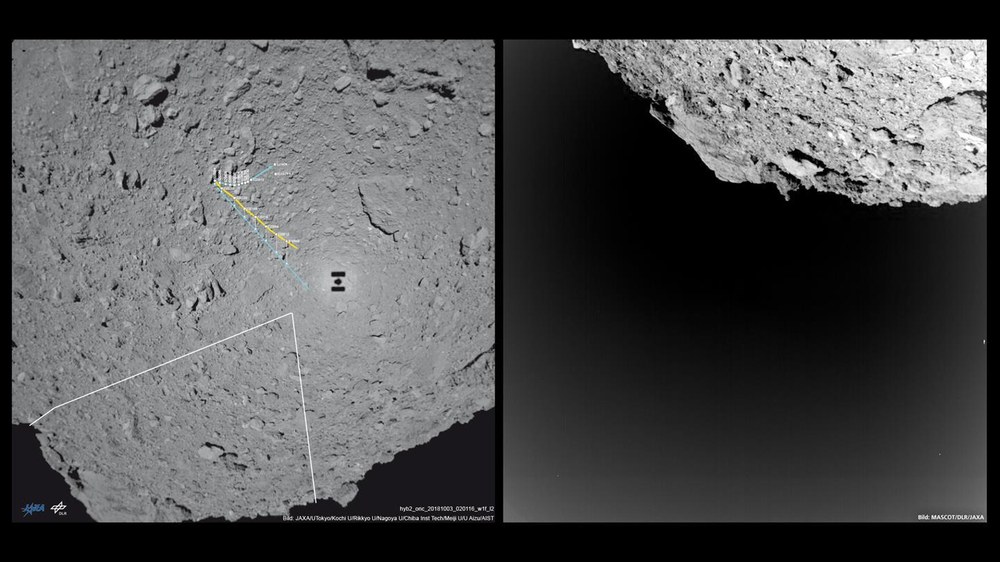
MASCOT image of Ryugu's south polar region shortly after separation
The image on the right shows the first image acquired by the DLR-developed MASCAM camera system during Hayabusa2's descent, shortly after separation from the landing module at a height of 51 metres with a viewing direction towards the south pole. The area captured by MASCAM is marked as an open triangle in the overview image on the left, which was taken with the wide-angle camera of the ONC (Optical Navigation Camera) system of the Hayabusa2 spacecraft. Particularly striking is a huge block near the South Pole, which stands out clearly above the horizon line and which the scientists named 'South Polar Rock'. It may be several dozen, and even up to 100 metres tall.
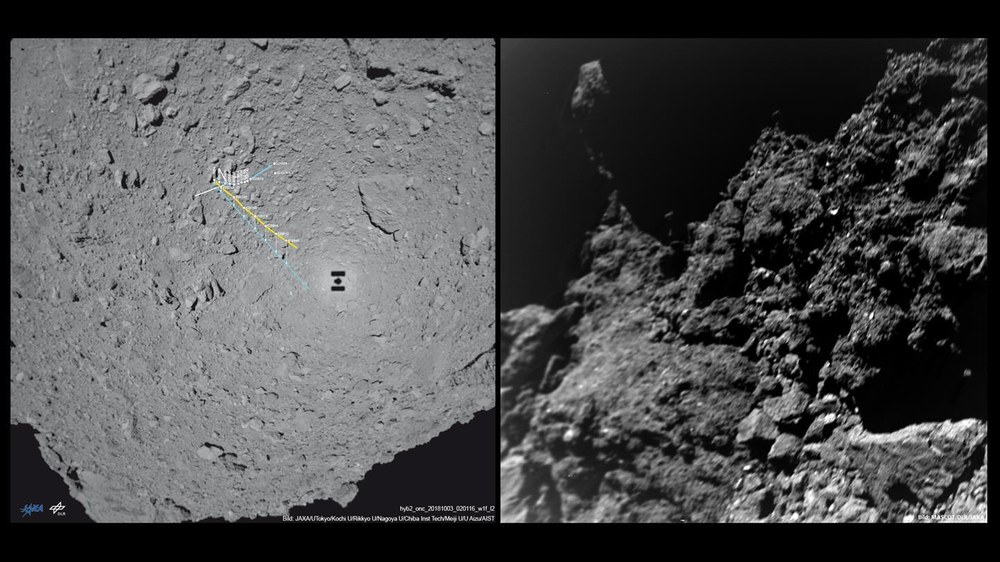
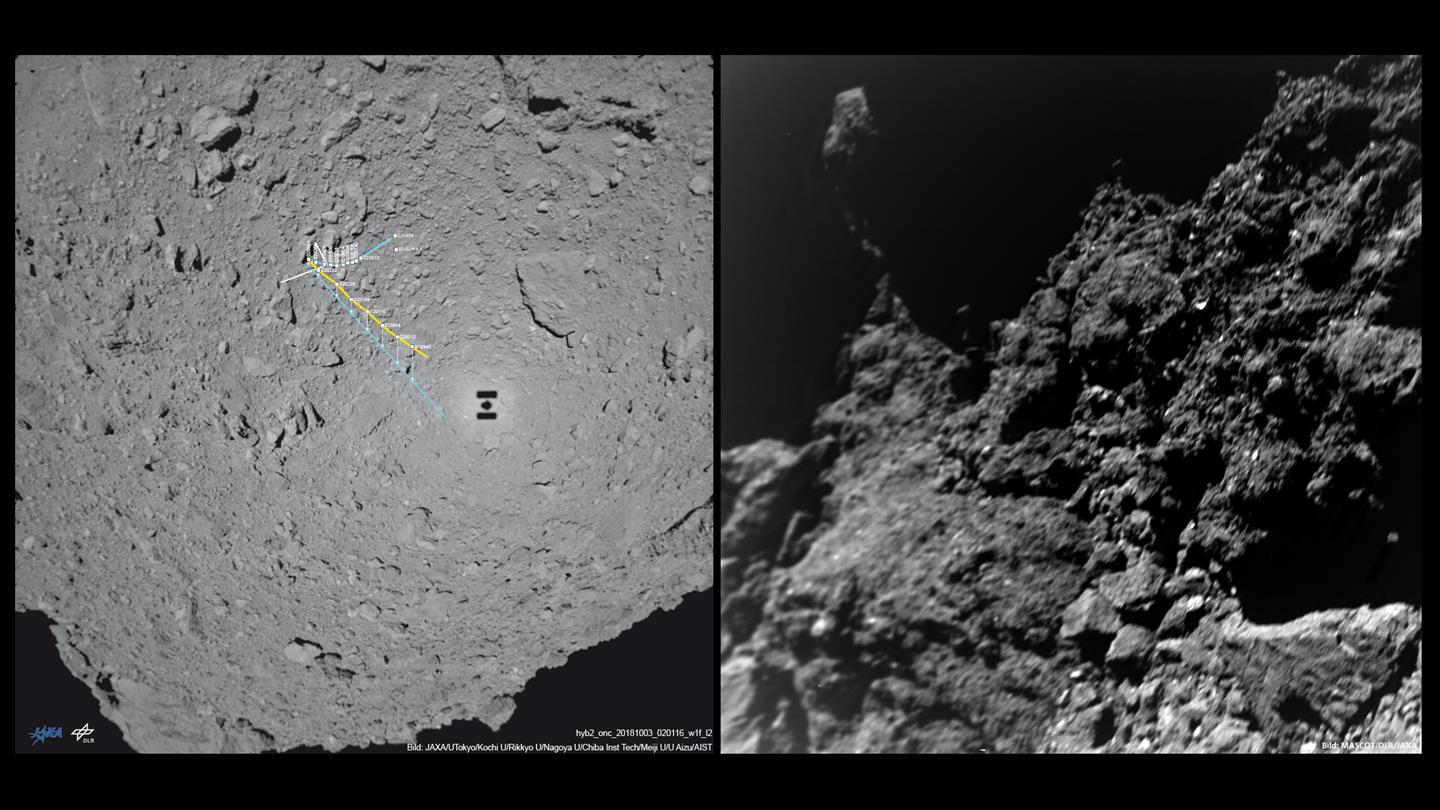
After first contact with the surface: the landing site environment
The fifth image acquired by the DLR-developed MASCAM camera system (right) was taken shortly after the first contact with the ground, just a few metres above the surface of Ryugu. The line of sight is directed to the northwest and is located between the two white boundary lines in the overview image (left) acquired by the wide-angle camera of the ONC (Optical Navigation Camera) system on board Hayabusa2. Just as in the images from higher altitudes, no fine material, known as regolith, can be seen, even in the immediate vicinity of the surface. Regolith is formed on atmosphere-less bodies due to their permanent exposure to high-energy particles from space or micrometeorites due to the weathering of coarser material into dust. Instead, the area is extremely rugged and full of sharp blocks. The landing site environment is reminiscent of the Abydos landing site of the Philae lander, which was released on Comet 67P / Churyumov-Gerasimenko by the Rosetta spacecraft on 12 November 2014.
The scientists were able to follow the path that MASCOT travelled on the surface of Ryugu on the basis of images and data from the mother probe Hayabusa2 and the lander.
Never before in the history of space has a body of the Solar System been explored in this way.
Focus: Space, exploration
Six minutes of free fall, a gentle impact on the asteroid and then 11 minutes of rebounding until coming to rest. That is how, in the early hours of 3 October 2018, the journey of the MASCOT asteroid lander began on Asteroid Ryugu – a land full of wonder, mystery and challenges. Some 17 hours of scientific exploration followed this first 'stroll' on the almost 900-metre diameter asteroid. The lander was commanded and controlled from the MASCOT Control Centre at the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) site in Cologne in the presence of scientific teams from Germany, France and Japan. MASCOT surpassed all expectations and performed its four experiments at several locations on the asteroid. Never before in the history of spaceflight has a Solar System body been explored in this way. It has now been possible to precisely trace MASCOT’s path on Ryugu’s surface on the basis of image data from the Japanese Hayabusa2 space probe and the lander’s images and data.
"This success was possible thanks to state-of-the-art robotic technology, long-term planning and intensive international cooperation between the scientists and engineers of the three space nations Japan, France and Germany," says Hansjörg Dittus, DLR Executive Board Member for Space Research and Technology about this milestone in Solar System exploration. "We are proud of how MASCOT was able to master its way across the asteroid Ryugu over boulders and rocks and send so much data about its composition back to Earth," says DLR Chair Pascale Ehrenfreund.
MASCOT had no propulsion system and landed in free fall. Six minutes after separating from Hayabusa2, and following the end of a ballistic trajectory, the landing module made its first contact with asteroid Ryugu. On the surface, MASCOT moved through the activation of a tungsten swing arm accelerated and decelerated by a motor. This made it possible for MASCOT to be repositioned to the 'correct' side or even perform hops across the asteroid's surface. The gravitational attraction on Ryugu is just one 66,500th of the Earth's, so the little momentum provided was enough: a technological innovation for an unusual form of mobility on an asteroid surface used for the first time in the history of space travel as part of the Hayabusa2 mission.
Through a rock garden full of rough boulders and no flat surfaces
To reconstruct MASCOT's path across the surface of Ryugu, the cameras aboard the Hayabusa2 mother probe were aimed at the asteroid. The Optical Navigation Cameras (ONC) captured the lander's free fall in several images, detected its shadow on the ground during the flight phase, and finally identified MASCOT directly on the surface in several images. The pattern of the countless boulders distributed on the surface could also be seen in the direction of the respective horizon in oblique photographs of the lander's DLR MASCAM camera. The combination of this information unlocked the unique path traced by the lander.
After the first impact, MASCOT smoothly bounced off a large block, touched the ground about eight times, and then found itself in a resting position unfavourable for the measurements. After commanding and executing a specially prepared correction manoeuvre, MASCOT came to a second halt. The exact location of this second position is still being determined. There, the lander completed detailed measurements during one asteroid day and night. This was followed by a small ‘mini-move’ to provide the MicrOmega spectrometer with even better conditions for measuring the composition of the asteroid material.
Finally, MASCOT was set in motion one last time for a bigger jump. At the last location it carried out some more measurements before the third night on the asteroid began, and contact with Hayabusa2 was lost as the spaceship had moved out of line of sight. The last signal from MASCOT reached the mother probe at 21:04 CEST. The mission was over. "We were expecting less than 16 hours of battery life because of the cold night, says MASCOT project manager Tra-Mi Ho from the DLR Institute of Space Systems. "After all, we were able to operate MASCOT for more than one extra hour, even until the radio shadow began, which was a great success." During the mission, the team named MASCOT's landing site (MA-9) 'Alice's Wonderland', after the eponymous book by Lewis Carroll (1832-1898).
A true wonderland
Having reconstructed the events that took place on asteroid Ryugu, the scientists are now busy analysing the first results from the acquired data and images. "What we saw from a distance already gave us an idea of what it might look like on the surface," reports Ralf Jaumann from the DLR Institute of Planetary Research and scientific director of the MASCOT mission. "In fact, it is even crazier on the surface than expected. Everything is covered in rough blocks and strewn with boulders. How compact these blocks are and what they are composed of, we still do not know. But what was most surprising was that large accumulations of fine material are nowhere to be found – and we did not expect that. We have to investigate this in the next few weeks, because the cosmic weathering would actually have had to produce fine material," continues Jaumann.
"MASCOT has delivered exactly what we expected: an 'extension' of the space probe on the surface of Ryugu and direct measurements on site," says Tra-Mi Ho. Now there are measurements across the entire spectrum, from telescope light curves from Earth to remote sensing with Hayabusa2 through to the microscopic findings of MASCOT. "This will be of enormous importance for the characterisation of this class of asteroids," emphasises Jaumann.
Ryugu is a C-type asteroid – a carbon-rich representative of the oldest bodies of the four-and-a-half-billion year-old Solar System. It is a 'primordial' building block of planet formation, and one of 17,000 known Near-Earth asteroids.
On Earth, there are meteorites with a composition that could be similar to Ryugu's, which are found in the Murchison Range, Australia. However, Matthias Grott from the DLR Institute of Planetary Research and responsible for the radiometer experiment MARA is skeptical as to whether these meteorites are actually representative of Ryugu in terms of their physical properties: "Meteorites such as those found in Murchison are rather massive. However, our MARA data suggests the material on Ryugu is slightly more porous. The investigations are just beginning, but it is plausible to assume that small fragments of Ryugu would not survive the entry into the Earth's atmosphere intact."
About the Hayabusa2 mission and MASCOT
Hayabusa2 is a Japanese space agency (Japan Aerospace Exploration Agency; JAXA) mission to the near-Earth asteroid Ryugu. The German-French lander MASCOT on board Hayabusa2 was developed by the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) and built in close cooperation with the French space agency CNES (Centre National d'Etudes Spatiales). DLR, the Institut d'Astrophysique Spatiale and the Technical University of Braunschweig have contributed the scientific experiments on board MASCOT. The MASCOT lander and its experiments are operated and controlled by DLR with support from CNES and in constant interaction with the Hayabusa2 team.
The DLR Institute of Space Systems in Bremen was responsible for developing and testing the lander together with CNES. The DLR Institute of Composite Structures and Adaptive Systems in Braunschweig was responsible for the stable structure of the lander. The DLR Robotics and Mechatronics Center in Oberpfaffenhofen developed the swing arm that allows MASCOT to hop on the asteroid. Das DLR Institute of Planetary Research in Berlin contributed the MASCAM camera and the MARA radiometer. The asteroid lander is monitored and operated from the MASCOT Control Center in the Microgravity User Support Center (MUSC) at the DLR site in Cologne.
MASCOT's 17 hours and 7 minutes on Ryugu
Time (CEST)
Event
03:57:21
At an altitude of 51 metres above asteroid Ryugu, MASCOT is pushed out of the Hayabusa2 supporting frame by means of a spring mechanism behind a push-off plate at about 4 centimetres per second and starts to descend to Ryugu without control of its ground station.
04:03
Approximately six minutes later, MASCOT touches down on Ryugu, making contact with a block of rocks about three to four metres high. The Optical Navigation Camera (ONC) from Hayabusa2 records the process in high-resolution images. At the same time, DLR’s MASCAM acquires 20 images of the asteroid during the descent. MASCOT lands on the designated landing site MA-9 (Alice's Wonderland). It is located at about 300 degrees east and 30 degrees south.
Around 04:34 First location
After another approximately. 31 minutes and several contacts with the surface, MASCOT reaches its first resting position. It is asteroid day at the landing site and the surface measurements start.
Around 06:30
At the DLR Control Centre in Cologne it is recognised that MASCOT is lying on an unfavourable side and thus cannot carry out its planned experiments. All systems and experiments are operating as intended.
Around 09:20
An unscheduled command from the Earth is sent to Hayabusa2 and from there to MASCOT to activate the swing arm to turn the lander into its intended position for the experiments. The command time to Ryugu, which is about 300 million kilometres away, is about 18 minutes one way.
Around 09:52
MASCOT has completed its first day-and-night cycle. The second day on Ryugu begins.
Around. 10:30 Second location
The manoeuvre has brought the desired result. MASCOT is in the right position, is now operational and automatically starts to perform its four experiments again.
Around 12:51
The second daylight phase on Ryugu is slowly coming to an end, and MASCOT turns with Ryugu into its second asteroid night.
Around 17:28
MASCOT’s third day on Ryugu begins.
Around 18:29 Third location
MASCOT successfully executes a mini-move. This manoeuvre was commanded by the operations team in Cologne to optimise the position of the sensors of the experiments. Further scientific investigations are carried out.
Around 20:04 Fourth location
The last jump is commanded to MASCOT and the lander goes into the End of Life phase. Further scientific investigations are carried out.
21:04
It is the end of the third day for MASCOT on Ryugu. In the meantime, more than 16 hours have passed – the lander’s expected maximum battery life. Contrary to the calculations, the battery still provides some power before the contact with MASCOT breaks off by the entry of a radio shadow and the upcoming night. Instead of 16 hours, the experiments were able to work for 17 hours and 7 minutes.

{kind=link}
{kind=link}
{kind=link}