March 22, 2022 | TumbleDock/ROAM project on the ISS
Mini robots practise grasping space debris
Simulation with the two Astrobees
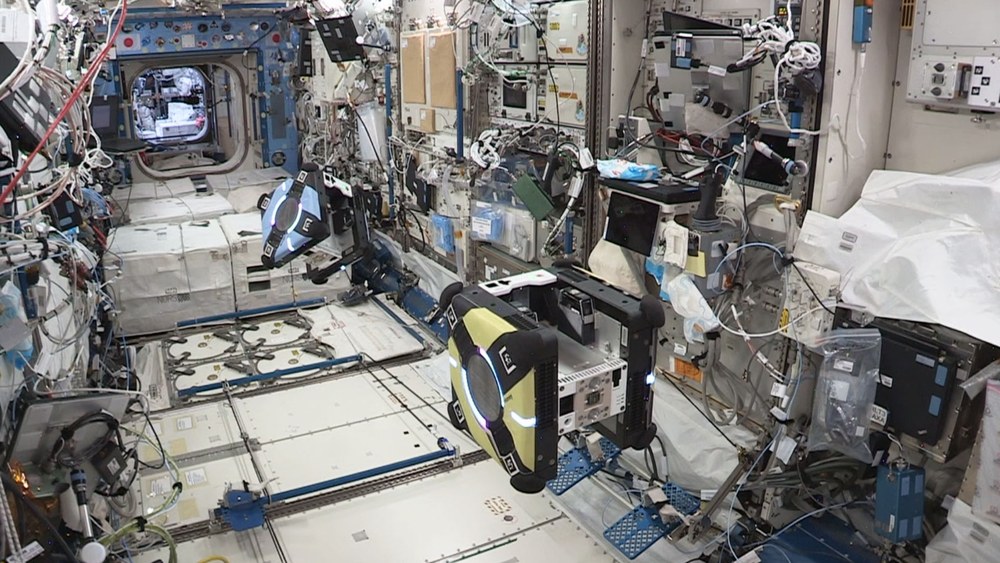
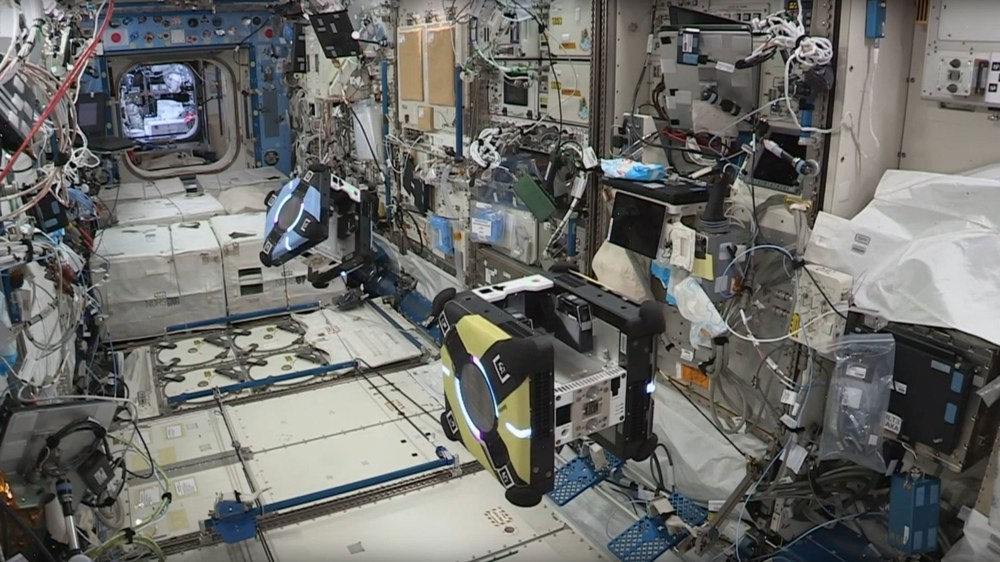
Honey the Astrobee approaches the tumbling Bumble and moves into position towards the 'target satellite'. To make the task more realistic, virtual solar panels and an antenna module were added to the target satellite.
Honey the Astrobee (right) and Bumble the Astrobee simulate the scenario on the International Space Station ISS. The two mini robots practise approaching a tumbling object.
A challenging feat for a little robot: Honey the Astrobee must grasp and transport Bumble the Astrobee. To pull it off, Honey needs to understand Bumble's trajectory, position itself correctly and avoid a collision at all costs. Artificial intelligence (AI) helps the cube-shaped robot to accurately assess the situation. The experiment is part of the TumbleDock/ROAM project, which the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) is carrying out together with its partners on the ISS. The experiments are part of an effort to determine the best way to remove hazardous pieces of space debris from Earth orbit.
"The two robots on the ISS will simulate an orbital scenario," says Roberto Lampariello from the DLR Institute of Robotics and Mechatronics in Oberpfaffenhofen. Debris is accumulating around the Earth: satellites that are no longer functional collide with others and create a vast quantity of uncontrolled objects. Experts fear what is known as the Kessler syndrome, a situation in which pieces of debris collide with one another and break into smaller pieces that go on to do the same, generating an ever-larger field of debris. More than 900,000 pieces of space debris now endanger safety in low-Earth orbit.
Get set, hold position and grasp!
DLR is also working on technology to reduce the risk posed by space debris. For example, it would be possible to capture pieces of debris and lower them so they burn up in Earth’s atmosphere (active debris removal; ADR) or repair satellites, preventing them from becoming debris (on-orbit servicing; OOS). In both cases, a safe approach to a piece of debris or a defective satellite must first be achieved. That is precisely what the Astrobees Honey and Bumble are practising in the Japanese Experiment Module (JEM) on the ISS. The robots operate completely independently.
On board the ISS, researchers test algorithms that allow the 'chaser' Astrobee (yellow) to approach the tumbling 'target satellite' Astrobee (blue).
Video: AeroAstroMIT – How to reach a tumbling target in space
Your consent to the storage of data ('cookies') is required for the playback of this video on Youtube.com. You can view and change your current data storage settings at any time under privacy.
Video: AeroAstroMIT – How to reach a tumbling target in space
On board the ISS, researchers test algorithms that allow the 'chaser' Astrobee (yellow) to approach the tumbling 'target satellite' Astrobee (blue).
Credit:
AeroAstroMIT/NASA
Honey the Astrobee represents the active spacecraft (the chaser), while Bumble plays the role of the target satellite. The plan is for the chaser to move into a pre-defined position in relation to the target and hold its position in a synchronised orbit. From this position, the target satellite could be captured in a future mission with a robotic arm installed on the chaser. The chaser must precisely predict the tumbling motion of the target satellite, plan a collision-free flight path to it and execute the grasp successfully. Approaching the satellite with high accuracy is essential for a successful capture. "To make the exercise more realistic, virtual solar panels are attached to the target satellite. The aim is to show that the autonomous activities being conducted on board the chaser can meet all of the necessary requirements under realistic conditions," says Lampariello. "The first tests were carried out during the experiments on the ISS at the beginning of February, and important components supplied by DLR performed excellently."
New potential uses for the Astrobees
These findings are key to the continued development of robotic chasers. The software for guiding Honey (chaser Astrobee) and for helping achieve realistic tumbling movements of Bumble (target satellite) was developed at the DLR Institute of Robotics and Mechatronics and successfully tested on the ISS. The robust control system was developed jointly with MIT (Massachusetts Institute of Technology), which also developed the control system for the chaser and the target satellite. The components could still be used for further tests on the ISS to demonstrate different approaches to the target satellite. NASA is also a partner in the TumbleDock/ROAM (Relative Operations for Autonomous Maneuvers) project, providing the Astrobees and controlling them throughout the experiments from NASA Ames Research Center in California (USA).
The Astrobees are a free-flying robotic system developed by NASA that support astronauts in routine tasks on the ISS. Honey, Bumble and Queen – three cubes roughly 30 centimetres in size – can also serve as research platforms. They are propelled by electric fans.