One focus of the Institute of Robotics and Mechatronics at DLR is the design and control of robotic arms. In this context, you will work on DLR’s next generation of robot joints and investigate the influence of joint elasticity on their positioning accuracy.
Your Tasks:
Conduct simulations of 1-joint-setups in MATLAB/Simulink
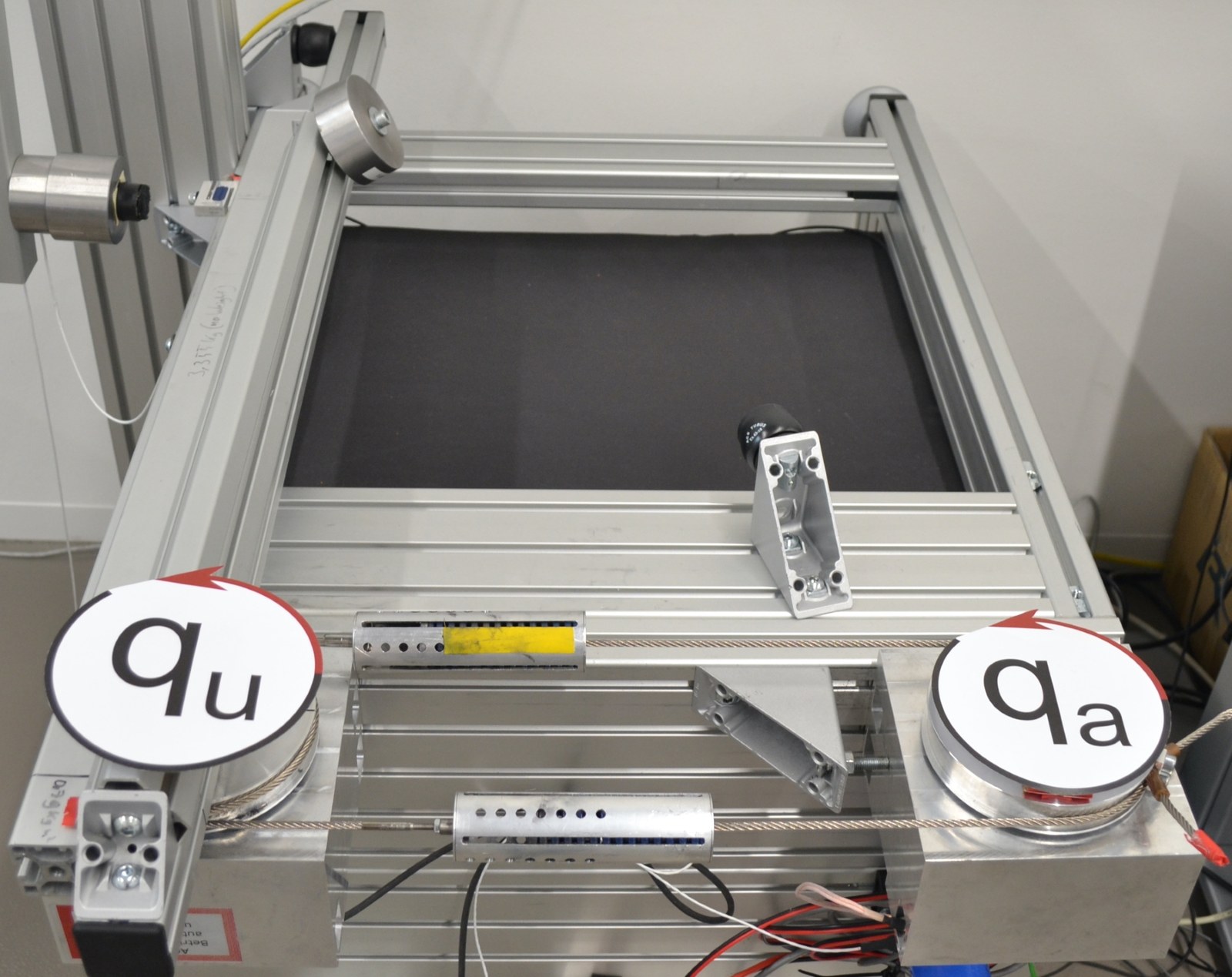
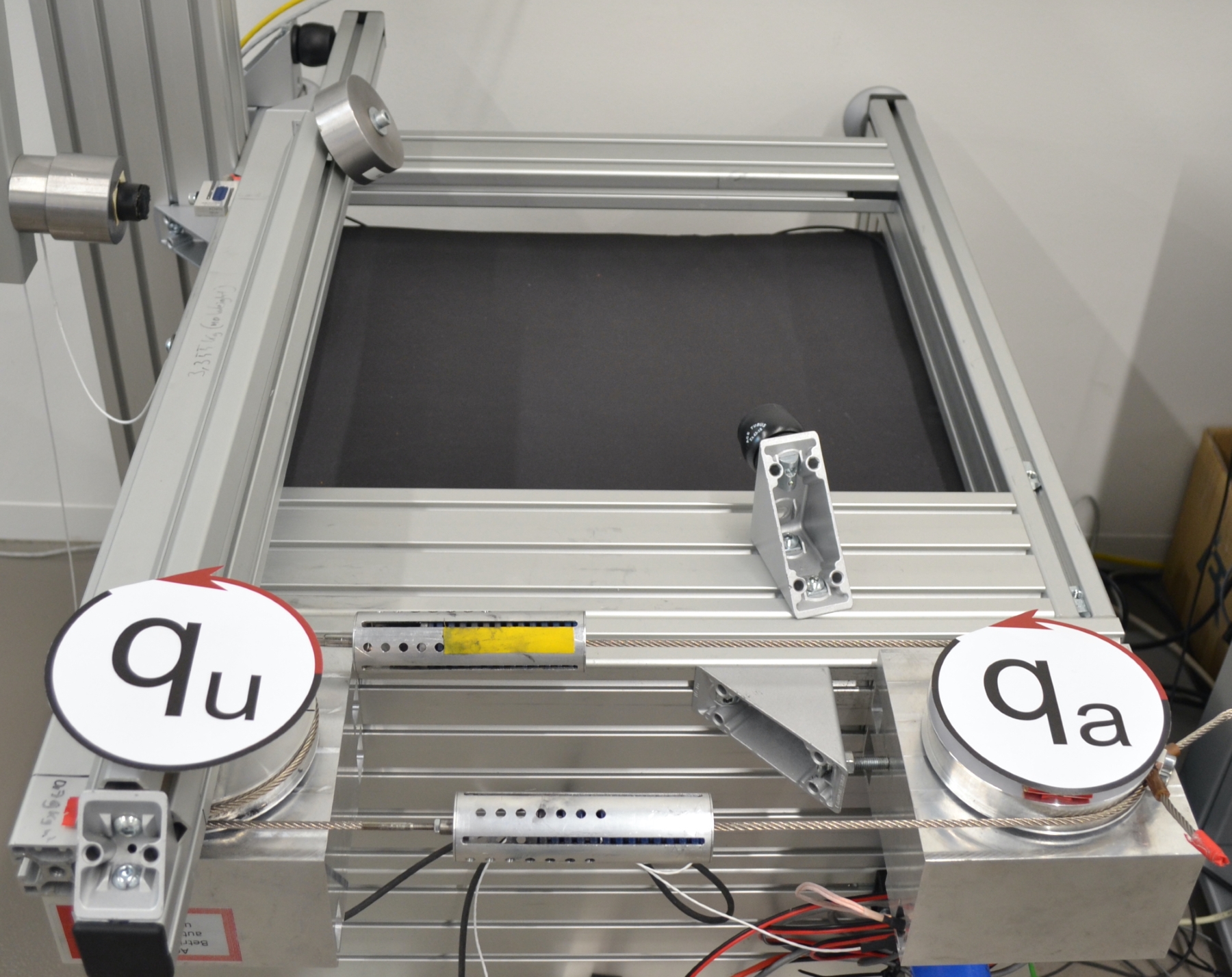
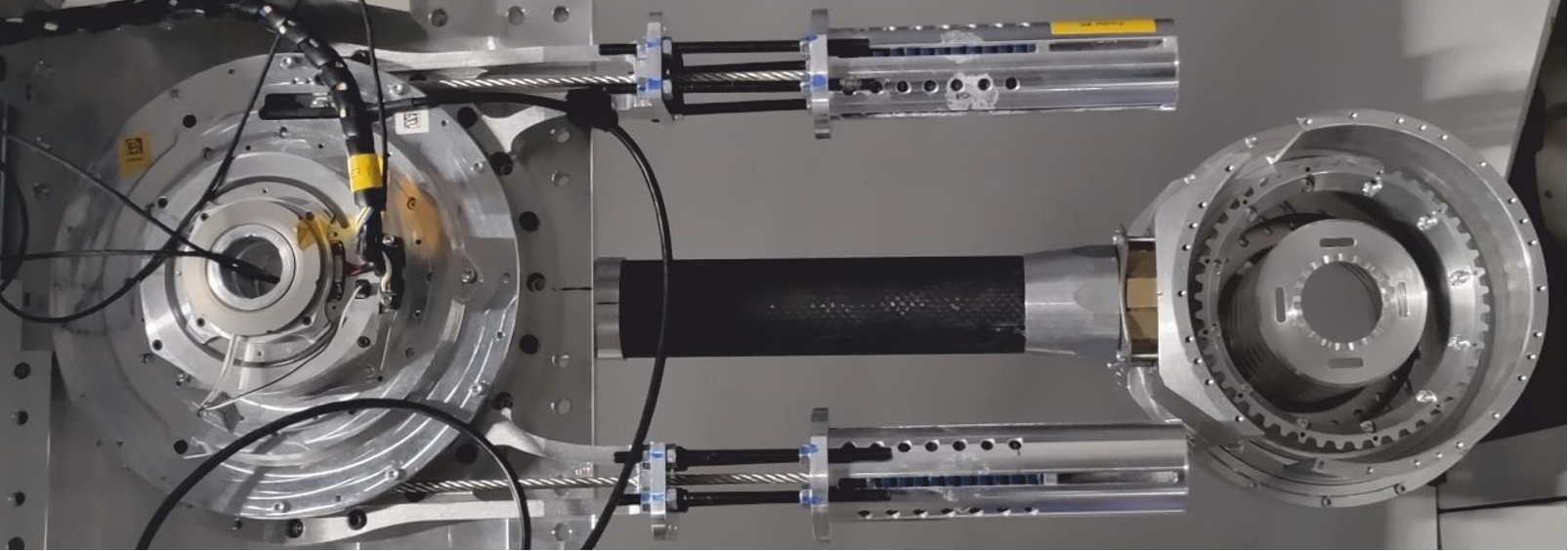
Conduct experiments on two different 1-joint-hardware-testbeds
Evaluate the results in a statistical analysis
Your Qualifications:
Strong background in control theory
Strong background in mechanics
Experience with MATLAB/Simulink
Practical experience with robotic systems (beneficial)
Precise and structured way of working
Start:
Earliest possible date
Contact:
Please send your CV, a short letter of motivation and a transcript of records/ record of your current study progress.
Kontakt
Office (ARR)
Institut für Robotik und Mechatronik
Analyse und Regelung komplexer Robotersysteme
Münchener Straße 20, 82234 Oberpfaffenhofen-Weßling



{kind=link}
{kind=link}