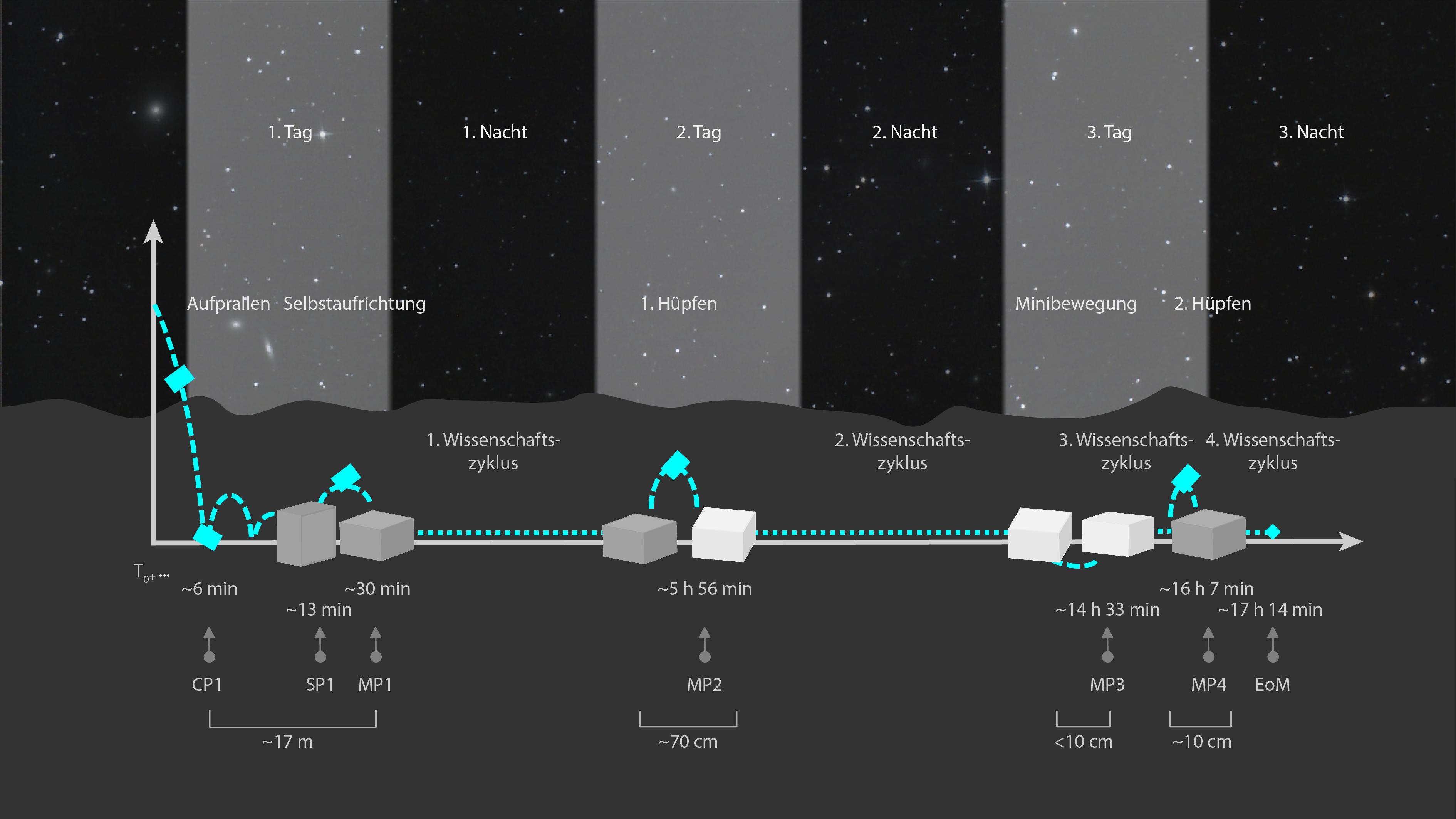
MASCOT’s 17 hours on the surface of Ryugu
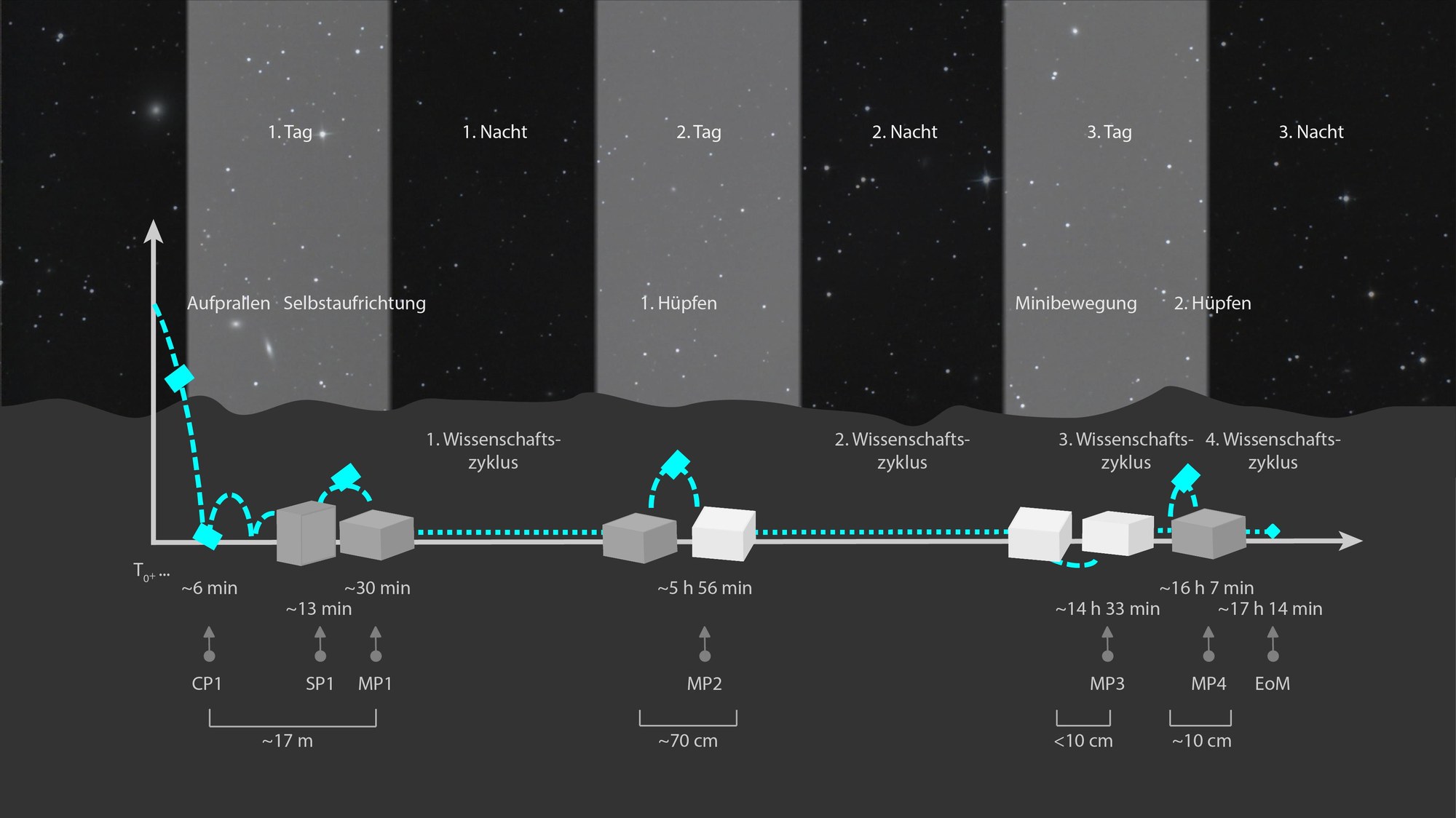

MASCOT’s 17 hours on the surface of Ryugu
MASCOT was deployed from Hayabusa2 on 3 October 2018 at 01:57:20 UTC at an altitude of 41 metres above the asteroid Ryugu. During the ballistic descent at a drop speed of 0.4 kilometres per hour, the module turned several times as expected, and touched down on the shaded side of a boulder six minutes later. MASCOT fell backwards and ‘rolled’ another 17 metres before stopping in a depression (SP1 = Settlement Point 1; Ryugu’s gravitational pull is only one sixty thousandth that of gravity on Earth – at 10 kilograms, MASCOT experienced a gravitational force of 0.17 grams on Ryugu). But a manoeuvre to correct the attitude at the first measurement point (MP1) caused MASCOT to lie on its ‘back’ and some instruments to look towards space. MASCam captured Jupiter and Saturn on the first asteroid night in five images. On the morning of the second Ryugu day, MASCOT’s swing arm was activated in order to reach the second measuring point (MP2). On the second asteroid night MASCam acquired nocturnal images with illumination of the rocks by four light-emitting diodes. On the morning of the third day, MASCOT performed a ‘mini move’ of five centimetres to the side to take (MP3) stereo images. Finally, MASCOT reached its last measurement point at MP4 at 19:04 UTC. The lander was operational for 17 hours. Then, contact with Hayabusa2 was discontinued.
{kind=link}