In the desert – Rover SherpaTT and Coyote III complete 'Space mission' in Utah
October 24, 2016
In the desert – Rover SherpaTT and Coyote III complete 'Space mission' in Utah
The test ground in the US state of Utah
The terrain, where the field test campaign of the Field Trials Utah project takes place, is reminiscent of a Mars landscape. It is located near the small town of Hanksville in the south of the US state of Utah.
From 24 October to 18 November 2016, in the Field Trials Utah project, the two rovers of the Robotics Innovation Center of the German Research Center for Artificial Intelligence (DFKI) will be tested during a field test campaign that resembles a ‘space mission'. As with a real mission, they are to take soil samples on site and transport them to a ‘ground station'. In addition, the technology of the two SherpaTT and Coyote III robots will be tested outside of usual laboratory conditions.
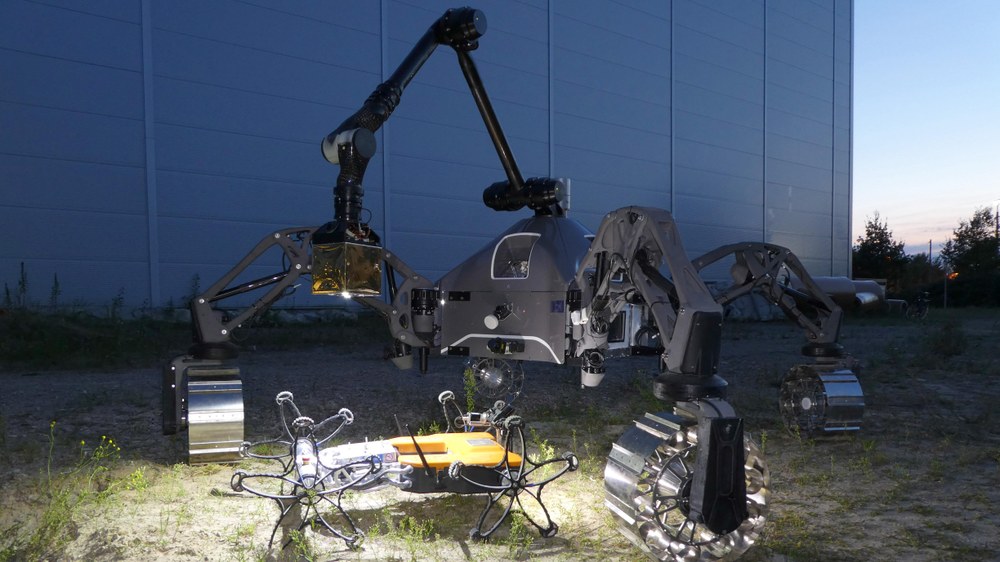
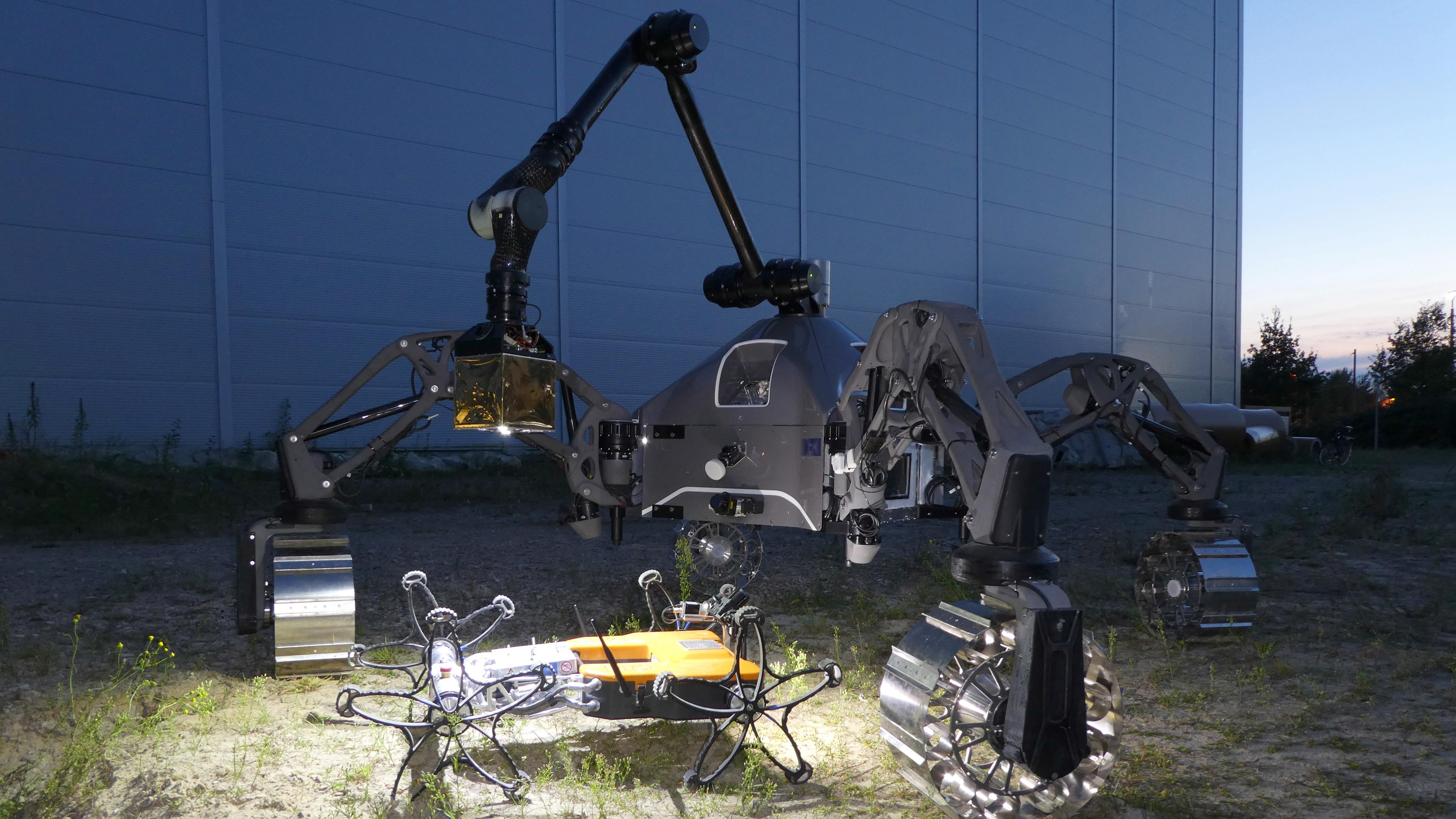
Most striking on the Micro-Rover Coyote III are its star-shaped wheels. These allow it to move forward quickly in all kinds of terrain. The robot can pick up and transport up to 15 kilograms of payload.
Project 'Field Trials Utah' tests cooperating robot system in Mars-like terrain
Starting 24 October 2016, a four-week 'space mission' will take place in Utah's semi-desert: this field test programme of the Field Trials Utah (FT-Utah) project is focusing on the SherpaTT and Coyote III. In the impassable, Mars-like test area not far from the small town of Hanksville in the south of the US state, the robots will have to undergo endurance and stress tests and should also successfully complete a mock-up mission scenario. The two robots work as a team: while the walking and driving rover SherpaTT crosses the area and takes samples, the Coyote III micro rover is responsible for the safe return of the sample material. The German Research Center for Artificial Intelligence (Deutschen Forschungszentrums für Künstliche Intelligenz; DFKI) and University of Bremen project is funded by the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) Space Administration.
SherpaTT and Coyote III – an odd pair tackling a common task
DFKI scientists – who have developed, built, and equipped both rovers with numerous functions – are conducting the test. Thanks to its four long legs equipped with wheels, SherpaTT is able to move effortlessly in difficult terrain. A knee joint even enables three-dimensional use of its chassis. Various sensors enable it to perceive its surroundings in detail, and thanks to this orientation ability, it can explore its environment autonomously. In addition, SherpaTT has a robot arm, which it can use with the help of a camera and a laser scanner, and with which it can take material samples and use the tools it carries, for example.
Its 'little brother', micro rover Coyote III, can travel at a speed of around five kilometres per hour in rough terrain – about twice as fast as SherpaTT. This speed is due to its special starwheels, which can be adapted to most diverse soil conditions. Weighing 12 kilograms, it is also significantly lighter than the SherpaTT, which weighs about 150 kilograms. This is not only due to its small size, but also to its lightweight construction, as it is made of materials such as carbon and aluminium.
Mission control via exoskeleton
Via a communication system, both robots can work together to accomplish their 'mission': just as one would in a real exploration scenario, it is first necessary to explore the terrain and then extract soil samples. These tasks are carried out by the walking-driving SherpaTT rover. The samples are then given to Coyote III, which transports them to a previously assigned 'landing station'. During a Mars mission, this would be the space probe, which would bring the samples back to Earth at the end of the mission. The two rovers can charge their batteries at a base station, which is also used to transfer data to the 'ground station'. The task of the ground station in this scenario is performed by the control station at the DFKI in Bremen: The entire progress of the programme is monitored from there. With the aid of a torso exoskeleton, a scientist can control the robots via a satellite link, if necessary.
The ability to work as a team is also a requirement for the robots
Both robots are part of the TransTerrA project. In this project, autonomous robot systems are developed that are capable of exploring remote planetary surfaces and working together in teams. An important goal is to also use the technologies developed for this purpose on Earth: for example, the use of rovers in underwater operations, search and rescue services, as well as the development of robots in the field of rehabilitation medicine, such as exoskeleton systems.
It usually takes many years for new planetary rovers and mission scenarios to actually be used in space. In order to prove that the robots can withstand adverse conditions outside the laboratory and can also perform their work on the Moon or Mars, tests under realistic mission conditions are an important step. In cooperation with the Canadian Space Agency (CSA), DFKI and the University of Bremen have therefore developed a concept to bring the experiments originally planned for the laboratory into a more realistic environment such as Mars terrain. This concept has resulted in the ‘FT Utah’ field test programme. The test results are intended to show whether the robot technology is sufficiently advanced and provides valuable results for further development.
The DFKI is leading the FT-Utah project with the University of Bremen as joint partner. The DFKI is also responsible for the implementation of the 'TransTerrA' project and responsible for the development and construction of the rover. Both projects are funded by the DLR Space Administration with funds from the German Federal Ministry of Economics and Energy (Bundesministeriums für Wirtschaft und Energie; BMWi).



{kind=link}
{kind=link}
{kind=link}