The topography of Jezero crater – landing site of NASA's Mars 2020 mission
September 29, 2020 | Mars Express mission
The topography of Jezero crater – landing site of NASA's Mars 2020 mission
View of Jezero crater
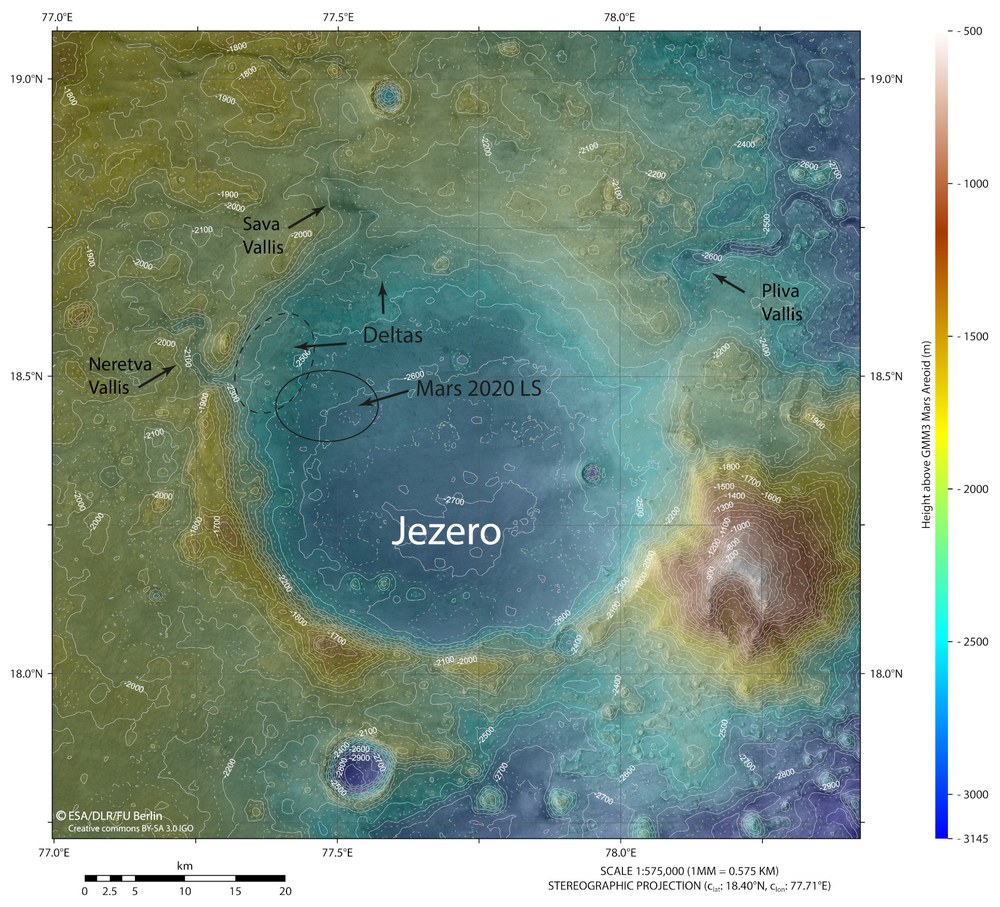
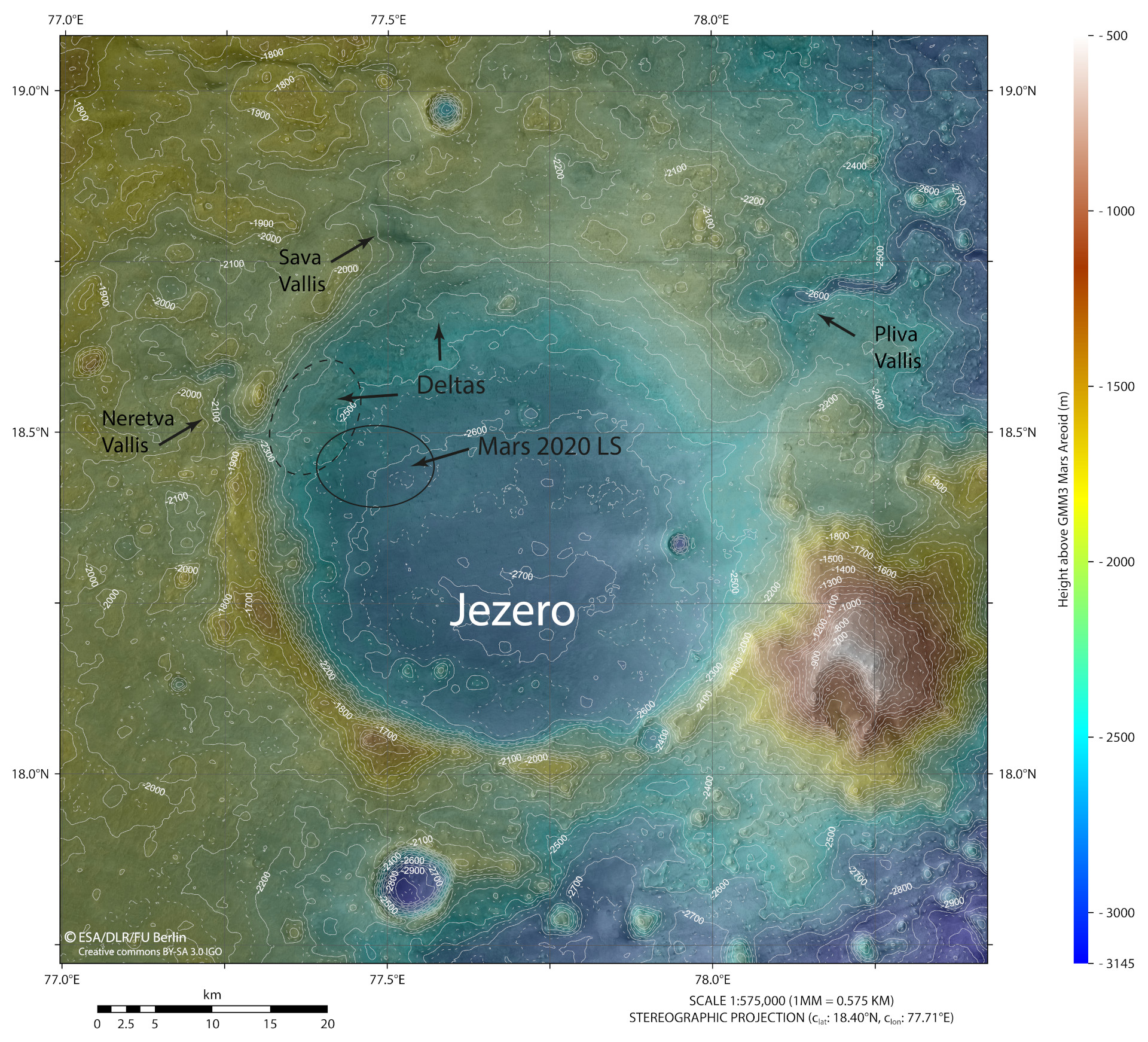
This map of Jezero crater on Mars was constructed using numerous stereo images acquired by the High Resolution Stereo Camera (HRSC) operated by DLR on board ESA's Mars Express orbiter. It is the most accurate surface model of the entire impact crater to date. Jezero once contained a lake, which makes it a perfect target for the search for possible past life on Mars.
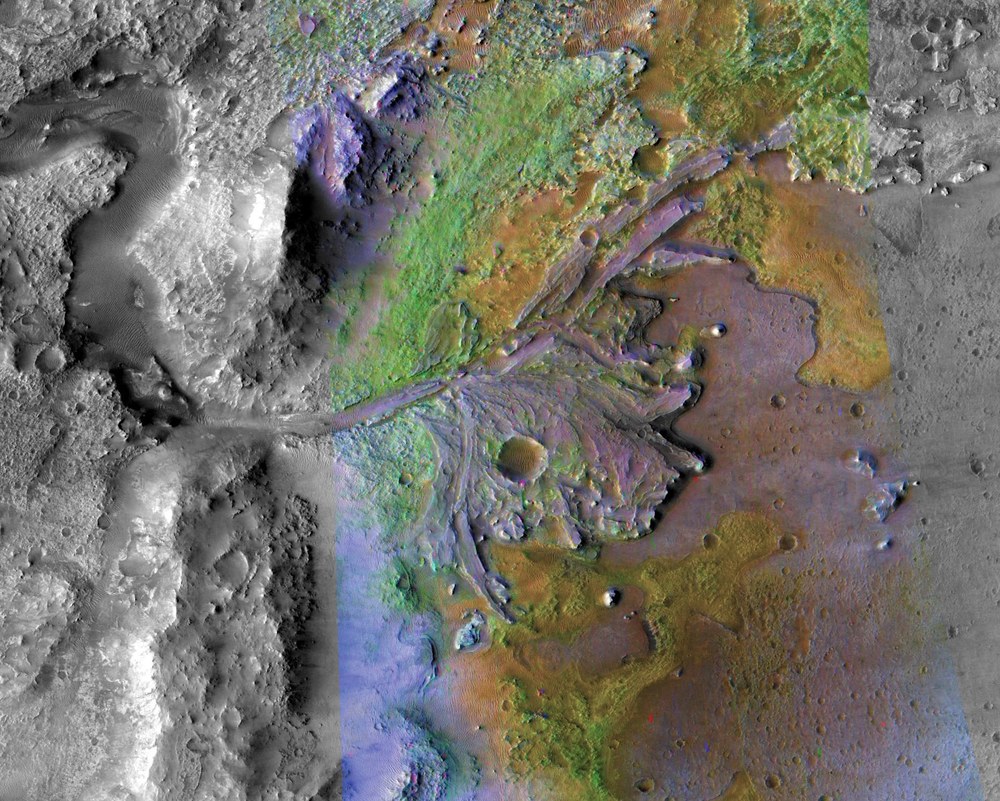
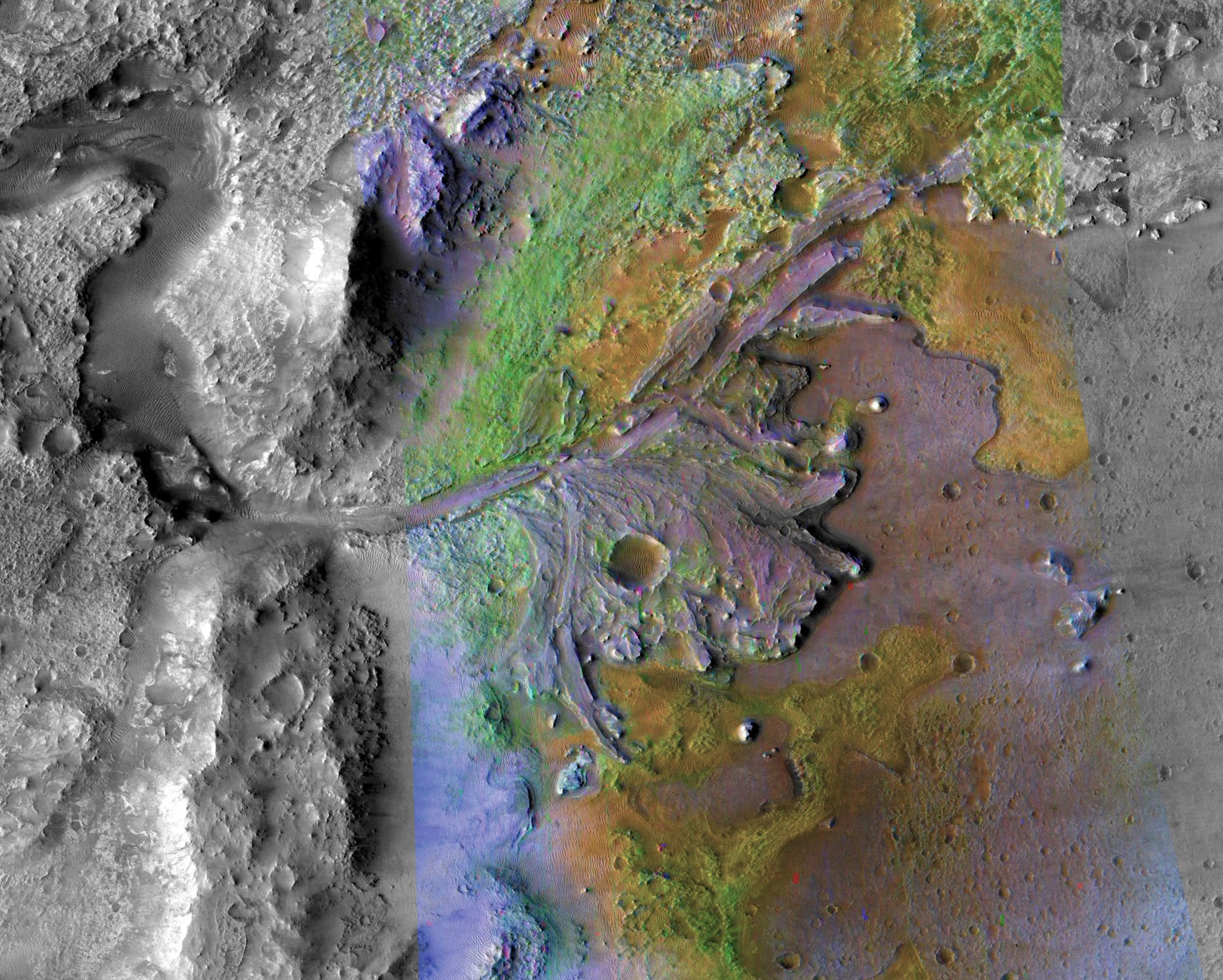
A variety of interesting minerals have been detected in the ancient delta on the north-western inner rim of the 35-kilometre-wide Jezero Crater, which will be studied by Perseverance. This image shows a combination of images from two camera systems on board NASA’s Mars Reconnaissance Orbiter – high-resolution images from the HiRISE camera and superimposed, colour data from the CRISM spectrometer, which reveal the different minerals. In addition to the magnesium-iron silicates of the olivines, these also include carbonates (limestones) and clay minerals (weathered volcanic rocks altered by contact with water). The latter two mineral groups are known to be particularly good at preserving traces of life – referred to as biosignatures.
The most accurate topographic model of Jezero crater today – created using data from DLR's High Resolution Stereo Camera (HRSC). Jezero crater is the landing site for NASA's Perseverance rover.
The 3.9-billion-year-old Jezero crater was once home to a lake that was fed by tributaries from large regional water catchment areas and at whose mouth two deltas formed in the lake.
HRSC has been orbiting Mars on board ESA's Mars Express spacecraft since 2004.
Focus: Space, planetary research, Mars
NASA's 2020 Mars mission has been en route to the Red Planet for two months now. The Perseverance rover on board the spacecraft is set to land in Jezero crater on 18 February 2021. There, the rover, which weighs almost one tonne, will search for signs of past microbial life. Jezero crater was chosen for good scientific reasons. Within the crater lie two ancient river deltas in which many hydrated minerals have been discovered – proof that liquid water existed there for a very long period of time. Precise maps showing the geographical conditions are essential both for the selection of the landing site and for planning exploration on the ground. A topographical map has now been created using numerous stereo images acquired by the HRSC camera operated by the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) on board ESA’s Mars Express spacecraft. This is the most accurate surface model of the entire crater to date.
Water – the most important prerequisite for life
Jezero crater was formed during the Noachian era, approximately 3.9 billion years ago. The landing site planned for the Perseverance rover is marked with an ellipse labelled 'Mars 2020 LS'. Jezero was once home to a lake and two deltas that were fed with water by tributaries from the large catchment areas in the region. The larger and more clearly defined delta is marked on the map with a dashed ellipse. Its two former tributary valleys (Neretva Vallis and Sava Vallis) can be seen on the western and north-western edges of the crater. An outflow valley (Pliva Vallis) breaks through the crater rim to the east.
The floor of Jezero crater has an elevation of 2700 metres below the notional 'sea level' on Mars. Strictly speaking, this reference level, which is used on the map shown here, is a surface of equal gravitational attraction, referred to as an areoid. The lake in Jezero crater is thought to have been at least 250 metres deep, a figure derived from the altitude measurements for the crater rim, the crater floor, the river valley profile and the upper edges of the deltas. However, it is no longer possible to make precise estimates today, as the deltas have been severely eroded since water activity ceased approximately 3.8 billion years ago. In addition, the crater was filled with very extensive lava flows from the nearby Syrtis Major region about 300 million years later.
The topographical map clearly shows how the northern part of the crater floor is sloping and this results in a less clearly defined crater rim when compared to the flat, southern part of the crater floor and the steeper southern flanks. This is due to the erosion of material in the catchment areas to the north of the crater, which was then transported into the crater itself and deposited as sediments in the delta. The erosion of the northern crater rim by the three river valleys that break through it also contributed to the creation of Jezero's asymmetrical topography.
Clay minerals, particularly carbonates, which have been discovered in comparatively large quantities in the western delta, are significant as potential repositories of biosignatures – that is, traces of microbial life. The early presence of liquid water and the enormous carbonate deposits here make Jezero a perfect destination for the search for possible past life on Mars.
From image data to a mosaic and topographic map
The map shown here was generated using an image mosaic assembled from individual images acquired by the High Resolution Stereo Camera (HRSC) on board ESA’s mission Mars Express orbiter. The colour mosaic on which the map is based was derived from two image strips acquired during orbits 5252 and 5270. It covers an area located at approximately 18 degrees north and 77 degrees east. The colour-coded topographical map is based on a Digital Terrain Model (DTM) of the region, from which the topography of the landscape can be derived. The reference for the HRSC-DTM is an equipotential surface of Mars (areoid). The HRSC camera on board Mars Express is operated by the German Aerospace Center (DLR). Systematic processing of the camera data was carried out at the DLR Institute of Planetary Research in Berlin-Adlershof. Personnel at the Department of Planetary Sciences and Remote Sensing at Freie Universität Berlin used these data to create the image products shown here.
The HRSC experiment on Mars Express
The High Resolution Stereo Camera (HRSC) was developed by the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) and built in collaboration with partners in industry (EADS Astrium, Lewicki Microelectronic GmbH and Jena-Optronik GmbH). The science team, which is headed by Principal Investigator (PI) Ralf Jaumann, consists of 50 co-investigators from 35 institutions in 11 countries. The camera is operated by the DLR Institute of Planetary Research in Berlin-Adlershof.

{kind=link}
{kind=link}