Cave training for DLR Scout rover

Sarah Lichtenheldt

Sarah Lichtenheldt

Sarah Lichtenheldt
- Researchers from Oberpfaffenhofen conducted tests involving the DLR Scout rover in a Bavarian cave system.
- The rover is being used to advance exploration technologies for future missions in lava caves on the Moon and Mars.
- Focus: Spaceflight, robotics, exploration
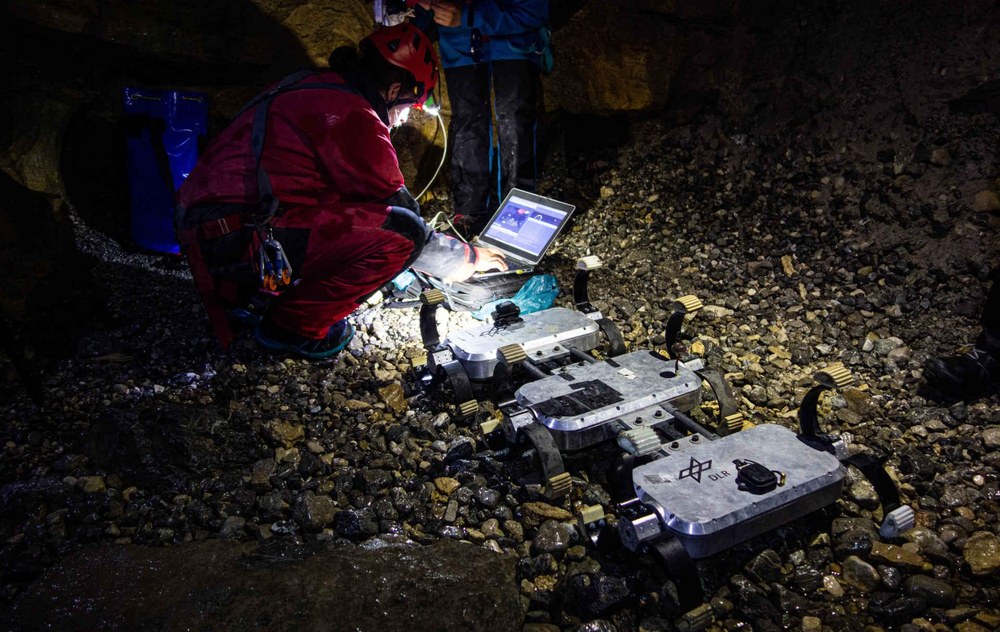
Enormous, kilometre-long lava caves are believed to have formed on the Moon and Mars billions of years ago as a result of volcanic activity. These tunnel and cave systems hold significant importance for scientific exploration, particularly on Mars, as they may contain traces of past or even current life. However, the steep, impassable crater walls have remained beyond the reach of traditional rovers. With the assistance of 'Scout', researchers from the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) aim to advance exploration technologies for these lava caves. To prepare the rover for future missions in lava caves on the Moon and Mars, the DLR Institute of System Dynamics and Control conducted tests involving Scout in a terrestrial cave system in Bavaria.
The deployment of rovers in caves remains rare and poses a considerable challenge for mobile robots. Given the diverse shapes within these natural cavities, the environment is highly demanding. Within the cave, the rover underwent analyses to identify areas for improvement, which will be integrated into the next prototype. During testing, Scout was required to traverse a horizontal distance of 50 metres, surmounting obstacles such as rocks, steps, narrow passages and a cold stream. "What appears to be just a stone's throw on the surface often translates to a lengthy and arduous journey in caves," reports Project Manager Roy Lichtenheldt from the DLR Institute of System Dynamics and Control.
Teleoperated through the cave
Scout, powered by batteries and operated via radio control, eliminates the need for cables during its operation, facilitating convenient outdoor testing. "Nevertheless, the rover faced considerable challenges during transport to the test area in the cave, comparable to enduring multiple short falls on hard rock. Such stresses can also occur during actual operational scenarios," says Lichtenheldt. To ensure the preservation of cave fauna, researchers carefully transported Scout to its deployment site.
Upon reaching the site, the rover was operated from a control station situated several cave chambers away. Using the images transmitted by the rover, the operator skilfully navigated Scout through the confined and obstacle-laden cave. "Despite the challenges, the radio connection within the cave remained stable. Moving forward, we plan to enhance this stability through the implementation of repeaters," explains Lichtenheldt. The unique wheel control system, developed at the DLR Institute of System Dynamics and Control, allowed the rover to manoeuvre safely within the cave.
The researchers are using the test results to formulate new system requirements and gather valuable information for future autonomy. Among other things, Scout is being retrofitted with innovative and energy-efficient matrix LED lighting. During the cave test, the rover had to 'make do' with the same lighting conditions as its human companions.
Scout successfully completed the adventurous journey to the designated location and performed exceptionally well under the real-world test conditions. Given the prototype's primary emphasis on the system's high robustness, the rover remained unaffected by shocks during transport or the elevated humidity within the cave. Following the rigorous test, only minor scratches and small dents were visible on the rover's aluminium casing. "The importance of such tests lies in their ability to reveal the system's design strengths and weaknesses. The insights offered often differ significantly from laboratory operation," emphasises the DLR researcher.
Protecting the delicate ecosystem within the cave has consistently been the main priority. Consequently, the tests were conducted outside the bat protection timeframe. Volunteer cave experts played a crucial role by actively assisting the DLR team with their local insights, by providing a comprehensive cave map and by transporting materials. In the coming years, Scout will carry out additional test drives within caves, progressively advancing towards the actual mission.
About the DLR rover Scout
Due to its robust design, the DLR rover Scout is able to navigate challenging terrains. Scout features an innovative, flexible spoked wheel and articulated back elements, enabling it to surmount obstacles that other rovers cannot. The robot can even navigate upside down and endure falls from heights up to two metres. These capabilities render it well-suited for exploration missions on Mars and the Moon. On Earth, the robust system can be used to rescue buried victims or in agricultural robotics.
- General features: Size 105 × 51 centimetres, weight 18 kilograms, payload up to six kilograms with a volume of five litres, speed 7.2 kilometres per hour.
- Special features: Capable of withstanding falls from heights of up to two metres, adept at self-righting when upside down, can navigate obstacles up to 40 centimetres tall.
Further information can be found here.