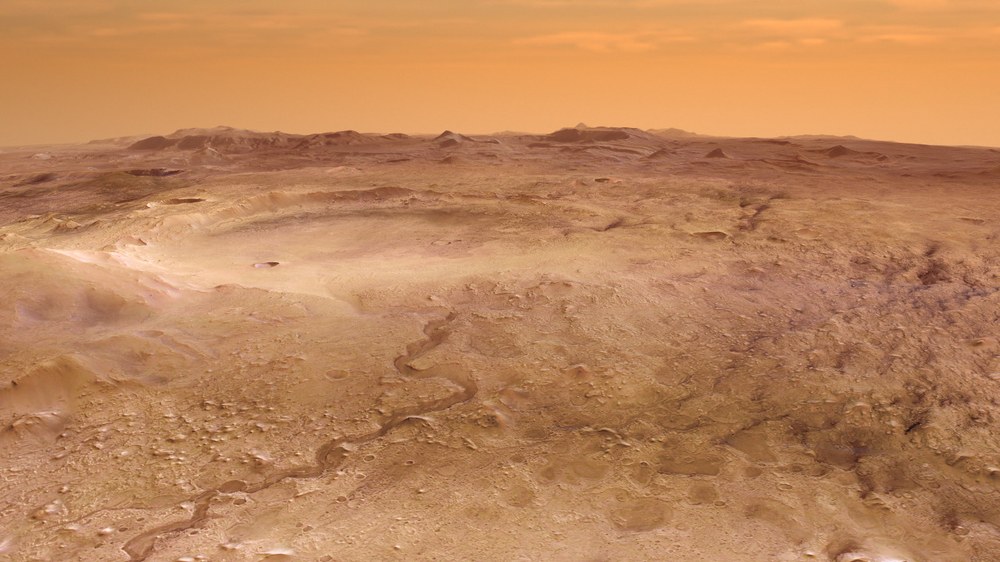
Still image from the 2023 tour of Jezero Crater video
The film was created by FU Berlin using a mosaic of images from several individual shots. It was based on observations made using DLR’s High Resolution Stereo Camera (HRSC) on board ESA's Mars Express mission.
Credit:
FU Berlin, ESA, DLR
A virtual flight over the Jezero impact crater and its surroundings, the landing site of NASA's Perseverance rover.
Observations made using DLR's High Resolution Stereo Camera (HRSC) on board ESA's Mars Express mission served as the basis for the video.
Focus: Space
The film we are presenting today as a special edition of our 'Mars image of the month' series offers a virtual flight over the Jezero impact crater and its surroundings, the landing site of NASA's Perseverance rover. It was created using an image mosaic consisting of several separate images, which was based on observations made by DLR's High Resolution Stereo Camera (HRSC) on board ESA's Mars Express orbiter. The high-precision digital terrain models generated using data from the HRSC have made an important contribution to the selection of numerous landing sites on Mars, including that of the Perseverance rover for the Mars 2020 mission. Accurate topographic information is critical to enable a safe landing on Mars. This was demonstrated on 18 February 2021, when NASA landed exactly where they had planned.
The film offers a virtual flight over the Jezero impact crater and its surroundings, the landing site of NASA's Perseverance rover. It was created using an image mosaic consisting of several separate images, which was based on observations made by DLR's High Resolution Stereo Camera (HRSC) on board ESA's Mars Express orbiter.
Animation: A virtual hike through the Jezero Crater
Your consent to the storage of data ('cookies') is required for the playback of this video on Quickchannel.com. You can view and change your current data storage settings at any time under privacy.
Animation: A virtual hike through the Jezero Crater
The film offers a virtual flight over the Jezero impact crater and its surroundings, the landing site of NASA's Perseverance rover. It was created using an image mosaic consisting of several separate images, which was based on observations made by DLR's High Resolution Stereo Camera (HRSC) on board ESA's Mars Express orbiter.
Credit:
FU Berlin, ESA, DLR
Former crater lake with inflows and outflows
Jezero Crater is 48 kilometres across and is located on the boundary between the ancient highland region of Terra Sabaea and the similarly ancient impact basin Isidis Planitia, whose current surface is covered primarily by significantly younger deposits. The nearby Nili Fossae rift system, whose curvature roughly traces the shape of the Isidis basin margin, was formed by the tectonic forces resulting from this impact.
Southwest of the crater is the volcanic region Syrtis Major. The dark, bluish-black areas that can be seen in the video in and around Jezero are covered by a layer of ancient volcanic ash. This ash is blown over a wide area by the wind and accumulates in many places to form impressive dune fields.
The rim of Jezero Crater is broken by three valleys through which rivers once flowed. Neretva Vallis and Sava Vallis were tributaries that created river deltas on the western and north-western rims of the crater, respectively. These deltas are considered to be evidence for the existence of a former lake in Jezero Crater. The deposition by rivers in these delta-shaped sedimentary fans provided the scientific rationale to study this area using the Perseverance rover of the Mars 2020 mission. On Earth, deltaic sedimentary fans are often places where traces of life are deposited. The primary goal of the mission is to identify traces of former life on Mars.
The third valley, Pliva Vallis, cuts through the eastern rim of the crater and was once a channel through which water drained from the crater. For this reason, this former crater lake is referred to as an 'open basin lake'.
Open and closed crater lakes were once very common on Mars. Compared to closed lakes – those which experience inflow but no outflow – open crater lakes are scientifically interesting because they were freshwater lakes with a stable water level. By contrast, lakes in closed basins were subject to more frequent periods of drying out, which caused them to become salt lakes. This makes them less promising than open crater lakes when it comes to the search for conditions conducive to life.
Combining images from HRSC and the Context Camera
The image of the Martian surface on which this film is based was produced by combining datasets from two different instruments. A 'tile' of the HRSC Mars Chart image mosaic (HMC30, tile MC13E) was used as the reference dataset. It provides the geodetically controlled topographic base and a seamless baseline image for the entire region. In addition, 33 Context Camera (CTX) frames from NASA's Mars Reconnaissance Orbiter – with a resolution of up to five metres per pixel – were used.
The individual CTX images were radiometrically adjusted. Any interfering radiation influences on the actual brightness value of the million pixels were removed using the HRSC MC13E tile as a brightness reference. The two datasets were colourised based on the colour channels of the HRSC using what are known as 'pan-sharpening' techniques. The resulting mosaic image was combined with topography information from the HRSC digital terrain model of the MC13E tile to produce a three-dimensional landscape.
Finally, 50 frames were rendered for each second of the film as the camera follows a predefined path through the scene. For this animation, the scene was vertically exaggerated by a factor of three in order to emphasise elevation changes in the expansive terrain. Atmospheric effects – clouds and haze at a distance of 200 kilometres – were digitally added to disguise the boundaries of the scene.
The HMC30 products consist of digital terrain models and geographically referenced greyscale image mosaics created from single strips of HRSC observations, which take into account location, elevation and sensor information. Each tile is also available as a colour image mosaic. The HMC30 data products are organised according to a modified version of the USGS MC-30 tiling scheme. All HMC30 products are based on bundle block adjustment of stereo imagery and reference global attitude information from the Mars Orbiter Laser Altimeter (MOLA).
The High Resolution Stereo Camera (HRSC) was developed at the German Aerospace Center (DLR) and built in cooperation with industrial partners (EADS Astrium, Lewicki Microelectronic GmbH and Jena-Optronik GmbH). The science team, led by Principal Investigator (PI) Thomas Roatsch of the DLR Institute of Planetary Research, consists of 50 co-investigators from 34 institutions and 10 nations. The camera is operated by the DLR Institute of Planetary Research in Berlin-Adlershof.