'Moon landing' performed with DLR Robotic Motion Simulator
April 7, 2022
'Moon landing' performed with DLR Robotic Motion Simulator
ESA astronaut Roberto Vittori in the DLR Robotic Motion Simulator
ESA astronaut Roberto Vittori was enthusiastic about the DLR Robotic Motion Simulator as a test facility. With the help of the motion simulation, he was able to experience realistically as a pilot how the spacecraft behaves in critical phases of the Moon landing and to intervene in a supervisory role.
For the test campaign at DLR in Oberpfaffenhofen, the capsule of the DLR Robotic Motion Simulator was converted into a lunar module. The manoeuvres of the Lunar Module could be followed on a large screen. Here, ESA astronaut and pilot Roberto Vittori is completing a safe landing in the control module.
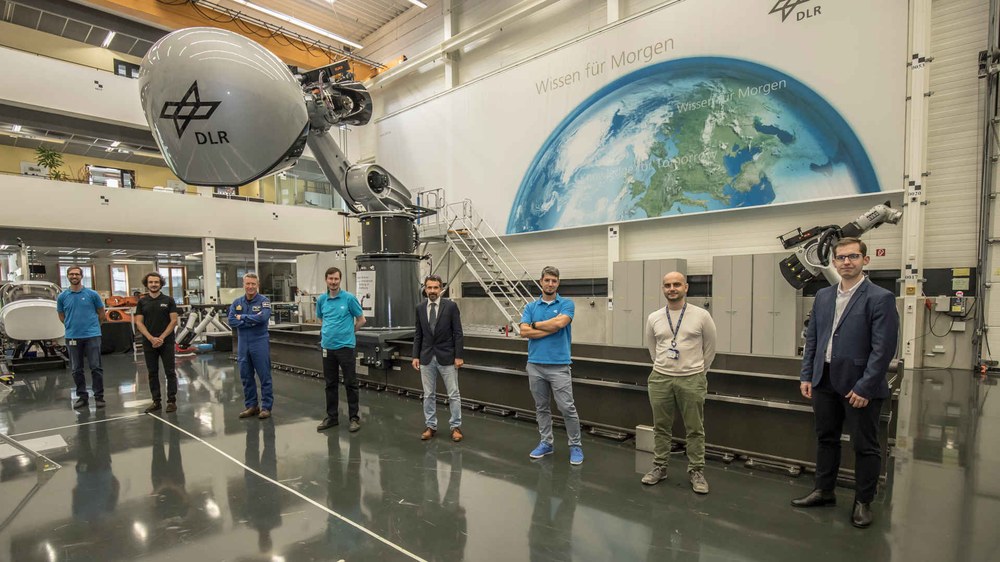
Project team after the successful experiment at DLR Oberpfaffenhofen
The DLR Robotic Motion Simulator is operated by the Techlab at the DLR Institute of System Dynamics and Control in Oberpfaffenhofen. In the picture, the project partners involved in the experiment (from left to right): Andreas Seefried (DLR), Vincenzo Pesce (GMV), Roberto Vittori (ESA), Tobias Bellmann (DLR), Luca Ferracina, Miguel Neves (DLR), Eugenio Sorbellini (Thales Alenia Space) and Csaba Jéger (HE Space Operations).
Test pilot and ESA astronaut Roberto Vittori tests the 'DLR Robotic Motion Simulator'.
Using the motion simulation, one can intuitively sense the behaviour of the lander and thus realistically control the lunar module.
The experiment is part of the ESA project 'Human-In-the-Loop Flight Vehicle Engineering for Exploration Missions'.
Focus: Space, Moon exploration
How will astronauts land safely on the Moon in the future? A seamless interaction between pilot and spacecraft is crucial to ensuring a successful Moon landing. Together with partners from industry and research, the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) has conducted a special experiment. European Space Agency (ESA) astronaut and test pilot Roberto Vittori has tested various lunar landing manoeuvres for the first time during a fully mobile simulation in the flight deck of the 'DLR Robotic Motion Simulator'.
ESA astronaut Roberto Vittori tests manoeuvres
The motion simulator was developed at the DLR Institute of System Dynamics and Control and allows for extreme tilt angles and manoeuvres. As a test pilot in the simulator in Oberpfaffenhofen, the ESA astronaut was able to experience how a spacecraft behaves during critical flight phases and intervene to control it. This experiment is part of the ESA project 'Human-in-the-Loop Flight Vehicle Engineering for Exploration Missions'. Within this project, technology studies are being carried out for crewed landings at the Moon's South Pole.
In one test scenario, the auto pilot was set to land in a landing zone with boulders. Vittori was able to intervene within a given time window and select an alternative landing site free of boulders via touch screens. In another scenario, the autopilot experienced a technical fault. Here, the Italian astronaut was able to switch to fully manual control and successfully pilot the module manually as it descended onto the lunar surface.
Human-machine cooperation
A primary goal of the ESA project is to evaluate human-machine interfaces and assistance functions for spacecraft. For this purpose, the project participants developed a human-in-the-loop simulation that enables an astronaut to interact with the control system of the simulated lander. To simulate the final phase of a lunar landing, the DLR researchers converted the motion simulator into a lunar module.
The DLR Robotic Motion Simulator is based on an industrial robot arm with a flight deck capsule attached to the end. The system is highly customisable and has a particularly large available workspace. In contrast to classic mobile flight simulators, the DLR Robotic Motion Simulator makes it possible to achieve extreme tilt angles and manoeuvres.
"It was a beautiful run," said ESA astronaut Roberto Vittorio, stressing the intuitive feeling for motion the simulation system gave him. "The simulator is an incredible machine, probably one of the best I have experienced. This experiment is for me showing that Europe can play a key role in the future of exploration."
European Space Agency (ESA) astronaut Roberto Vittori has tested various lunar landing manoeuvres for the first time in the flight deck of the 'DLR Robotic Motion Simulator'. The motion simulator was developed at the DLR Institute of System Dynamics and Control and allows for extreme tilt angles and manoeuvres. The experiment is part of the ESA project 'Human-in-the-Loop Flight Vehicle Engineering for Exploration Missions'. Within this project, technology studies are being carried out for crewed landings at the Moon’s South Pole. The main goals are to evaluate human-machine interfaces and assistance functions for spacecraft. DLR researchers are also studying how the conditions and effects of motion that occur in lower gravity can best be simulated on Earth.
Successful 'Moon landing' using the DLR robotic motion simulator
Your consent to the storage of data ('cookies') is required for the playback of this video on Youtube.com. You can view and change your current data storage settings at any time under privacy.
Successful 'Moon landing' using the DLR robotic motion simulator
European Space Agency (ESA) astronaut Roberto Vittori has tested various lunar landing manoeuvres for the first time in the flight deck of the 'DLR Robotic Motion Simulator'. The motion simulator was developed at the DLR Institute of System Dynamics and Control and allows for extreme tilt angles and manoeuvres. The experiment is part of the ESA project 'Human-in-the-Loop Flight Vehicle Engineering for Exploration Missions'. Within this project, technology studies are being carried out for crewed landings at the Moon’s South Pole. The main goals are to evaluate human-machine interfaces and assistance functions for spacecraft. DLR researchers are also studying how the conditions and effects of motion that occur in lower gravity can best be simulated on Earth.
For this experiment, the DLR team equipped the capsule with touch screens, new input devices for the astronaut and a virtual flight deck window. The researchers also developed a high-resolution lunar visualisation that allowed the manoeuvres of the lunar module to be observed on a large screen outside the simulator.
Intuitive, realistic control
Another goal of the ESA project is to investigate in greater detail how well an astronaut can control and navigate the lunar module while under the influence of motion. The resulting findings will be used to define the technical requirements for future lunar landing missions. As part of the project, DLR researchers are also studying how the conditions and effects of motion that occur in lower gravity can best be simulated on Earth.
After the series of experiments was completed, the Italian ESA astronaut Vittori was extremely impressed by the facility in Oberpfaffenhofen and emphasised that the motion simulation gave him an intuitive feeling for the lander, which allowed him to control the lunar module in a realistic way. ESA project manager Luca Ferracina commented: "The experiment has clearly shown that the DLR Robotic Motion Simulator is very suitable for conducting this type of tests."
About the project
The Technical Directorate of the European Space Agency (ESA) has initiated the project 'Human-In-the-Loop Flight Vehicle Engineering for Exploration Missions' as part of preparations for the planned Lunar Orbital Platform-Gateway (LOP-G) space station. Among other things, the gateway is to serve as an intermediate station for crewed missions to the Moon.
The project is funded by ESA and is a collaboration between research and industry. Project partner Thales Alenia Space from Italy provided the user interfaces for manoeuvre control, in particular the software for the touch screens. The navigation and flight control of the simulated lunar module was developed by the Spanish company Grupo Tecnológico e Industrial GMV S.A. and adapted for the DLR simulator. The Robotic Motion Simulator was developed at the Institute of System Dynamics and Control.



{kind=link}
{kind=link}
{kind=link}
