
AROMA (2000–2002)
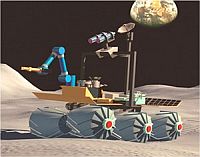


Die AROMA-Studie (2000–2002) konzentrierte sich hauptsächlich auf die Definition von Roboterkonfigurationen für verschiedene Zwecke in modularer Bauweise, die an verschiedene Mars-Rover-Typen angeschlossen werden. Der Beitrag des DLR zu dieser ESA-Studie bestand vor allem in der Definition geeigneter robotischer Geräte für die Inspektion und Überwachung von Einrichtungen auf dem Mars. Die Definition von intelligenten Nutzlastkonzepten mit geringer Masse und flexiblen Manipulationssystemen war erforderlich. Es wurden verschiedene Designoptionen untersucht, die vom Wirbelsäulenroboter bis zum modularen Roboterdesign reichen, wie es von den DLR-Robotern der 3. Generation bekannt ist. Der geschickte Wirbelsäulenarm ist aus zahlreichen Elementen aufgebaut und hat einen nahezu halbkugelförmigen Arbeitsbereich. Der Vorteil dieser Konfiguration ist die hervorragende Flexibilität, das geringe Gewicht und die Kompaktheit. Sie ist sehr gut für die Positionierung von Inspektionswerkzeugen geeignet. Aufgrund des Mangels an rotatorischen Freiheitsgraden hat er jedoch einige Nachteile für Montage- und Wartungsanwendungen. Das Design des modularen DLR-Roboterarms basiert auf einem modularen mechatronischen Gelenkdesign. Die Arme bestehen im Wesentlichen aus Roll- und Nickgelenkelementen sowie aus skalierbaren Gliedmaßenlängen.
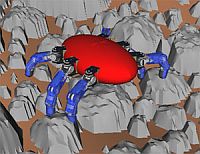
Konzept eines 6-beinigen Mikro-Rovers
Zusätzlich zur AROMA-Studie haben wir ein innovatives, 6-beiniges Mikro-Rover-Konzept entwickelt.
Die Kinematik des Rovers basiert auf sechs geschickten Vier-Gelenk-Fingern der DLR-Roboterhand II. Die Finger, die hier als Beine verwendet werden, sind käferartig an einem zentralen Körper befestigt und ermöglichen es dem Gesamtsystem, in felsigem Gelände (z.B. auf einer Planetenoberfläche) zu manövrieren. Da alle Gelenke mit Kraft-/Drehmomentsensoren ausgestattet sind, kann die Bewegung des Rovers außerdem sehr empfindlich sein.
Der Kern der Bewegungssteuerung des Rovers ist der Algorithmus der inversen Kinematik, der als Teil einer virtuellen Montage- und Simulationsumgebung des modularen Systems Leichtbauroboters III entwickelt wurde. Der leistungsstarke Algorithmus kann baumartige kinematische Systeme mit mehreren Einschränkungen steuern und ermöglicht es dem Rover, sich in einer natürlichen, käferähnlichen Haltung zu bewegen und dabei kinematische und dynamische Präferenzen (z.B. minimaler Energieverbrauch) und Einschränkungen (z.B. Gelenkwinkelbereich) zu berücksichtigen.