
MISSIS (2000)
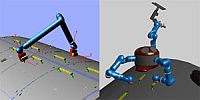

Im Jahr 2000 zielte die staatlich finanzierte Studie MISSIS (Mobile Inspection and Service System for ISS) auf die Entwicklung eines mobilen Inspektions- und Servicesystems für das Columbus-Modul der ISS ab. Das Hauptziel war die Demonstration fortschrittlicher Technologien zur Verbesserung der Sicherheit der Station bei gleichzeitiger Reduzierung der Außenbordaktivitäten (EVA), um mehr Zeit für andere Forschungsaktivitäten zu gewinnen. Das Ergebnis der Studie ist das MISSIS-System, das aus einem vollständig symmetrischen Roboter (insgesamt 7 DoF) besteht. Sein Hauptziel ist die autonome Durchführung von Inspektionsaufgaben, indem er an der Außenhülle des Columbus-Moduls entlangläuft und dabei die vorhandenen T-Griff-Schienen zur Fixierung nutzt. Der Manipulator sollte von seiner Zielposition auf der Balkonplattform aus starten, die als Andockstation für zusätzliche Ressourcen (Energie- und Datenversorgung) dient. Eine wichtige Aufgabe war das Scannen der Oberfläche mit einem Stereokamerasystem auf der Suche nach möglichen Gaslecks. Die Begehung erfordert die Entwicklung identischer Endeffektoren an beiden Enden des Arms mit entsprechender Energieversorgung und Datenübertragung. Die Entwicklung von Manipulatoren mit kinematischer Redundanz für diese roboterbasierten Szenarien wurde mit unseren leichtgewichtigen Modulen der dritten Generation für Gelenke, Verbindungen und Handgelenkmontage durchgeführt. Schließlich wurde ein ähnliches Begehungs- und Inspektionskonzept für ein dreiarmiges System in Anlehnung an die EUROBOT-Konzepte der ESA entwickelt.