August 25, 2017 | Astronaut on the ISS practices collaboration with Earth-based robot for future Mars missions
“Over to you, Justin!”
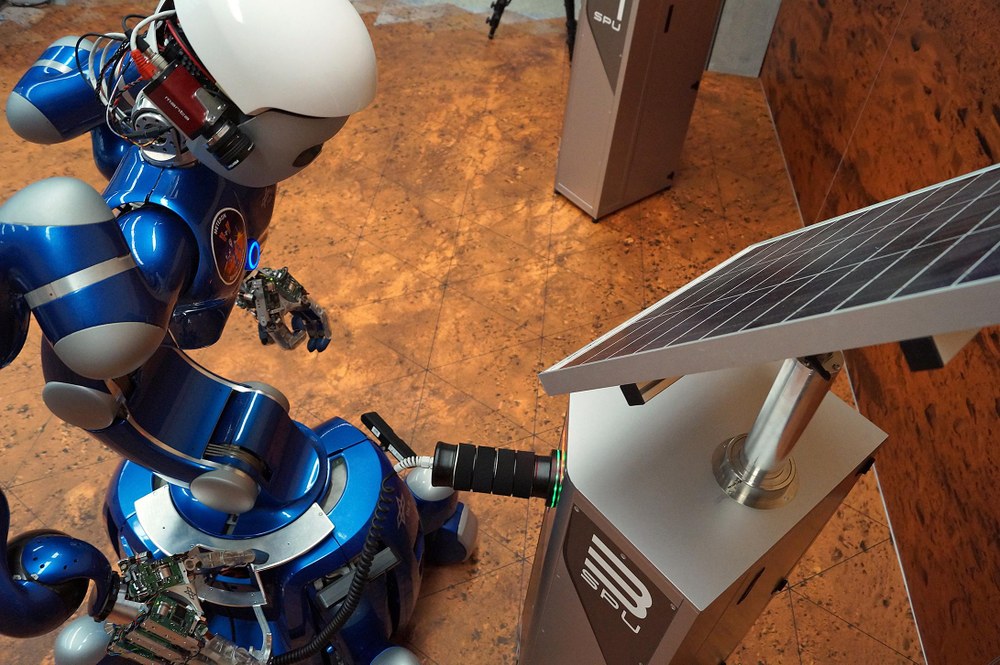
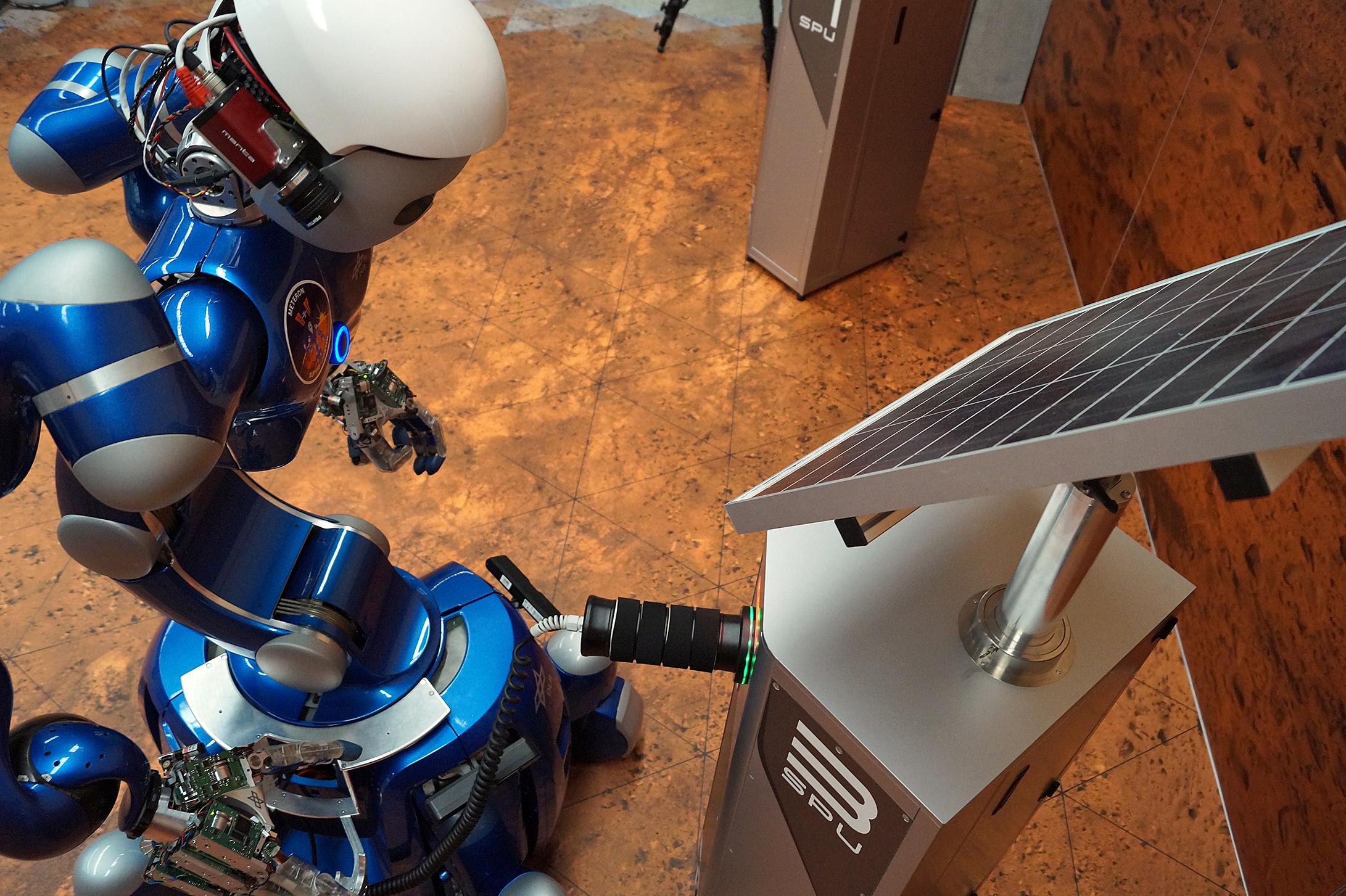
Maintenance of a solar panel
Within the scope of the METERON SUPVIS Justin experiment on 25 August 2017, the DLR robot 'Rollin' Justin' completed various tasks independently. The orders were given by ESA astronaut Paolo Nespoli via a tablet PC from the ISS.
In the picture: Rollin 'Justin has connected himself to a solar panel and is reading out the data. The robotic co-worker then carries out the necessary maintenance work in accordance with the error analysis.
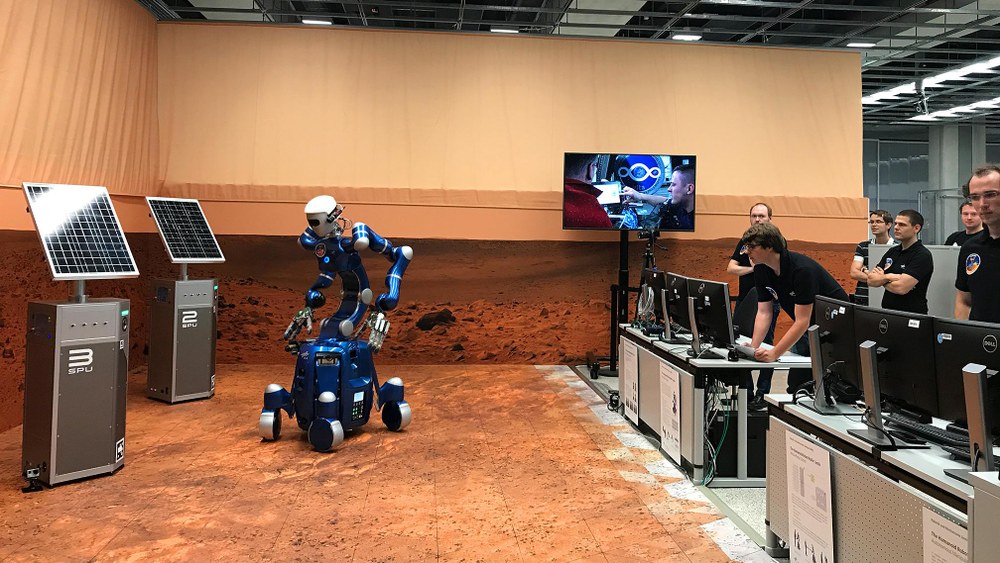
Rollin' Justin controls a solar panel for maintenance work. On the screen in the background, ESA astronaut Paolo Nespoli, who is instructing him from the International Space Station.
A command, remote input, and DLR robot Rollin' Justin performs a complex task independently - an important ability for future Mars missions and use in life-threatening environments on Earth.
Humanoid robot controlled from the ISS as an intelligent co-worker for the first time.
The scientific data and insights will be used for future Mars missions.
The technology used for human/robot collaboration in aerospace applications will also be beneficial for terrestrial purposes.
Focus: Space, Robotics, Artificial intelligence
On 25 August 2017, the Italian ESA astronaut Paolo Nespoli, currently residing on the International Space Station (ISS), remote-controlled the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) Rollin’ Justin robot. During the experiment, a tablet-PC was used to send instructions to the robot at the DLR Institute of Robotics and Mechatronics in Oberpfaffenhofen from the ISS. Justin was then left to his own devices in the completion of various tasks and was required to use artificial intelligence to decide how individual work stages needed to be completed. These tasks belong to the SUPVIS Justin experiment, which is being carried out as part of the METERONproject (Multi-Purpose End-to-End Robotic Operation Network) in cooperation with the European Space Agency (ESA).
Control from space
"In the SUPVIS Justin experiment, we are laying the foundation for cooperation between astronauts and intelligent, humanoid robots in the colonisation of distant planets and moons," says Alin Albu-Schäffer, director of the DLR Institute of Ro¬botics and Mechatronics. "The robots are equipped with high-performance local intelligence, so the astronaut only needs a tablet-PC to instruct the robot in the performance of complex activities," Albu-Schäffer continues.
In the first experiment in this series, Nespoli ordered Rollin’ Justin to service a solar farm set up specifically in the laboratory in Oberpfaffenhofen, to check the condition of several solar panels and to repair any faults. Nespoli familiarised himself with the Rollin‘ Justin test assembly back in March of this year, using the opportunity to discuss various issues with the DLR research team led by Neal Lii. The astronaut then travelled to the European Astronaut Centre (EAC) in Cologne in May to further train for this specific test series.
Looking ahead to Mars missions
"One particular task of the METERON SUPVIS Justin team at DLR and ESA is the advancement of tele-robotics in the aerospace field, especially in light of more efficient exploration of the Solar System," emphasises Lii. "We intend to use this project to cross new frontiers and to transform robots into true co-workers for a variety of tasks in aerospace. In the long term, this should ease the strain on astronauts in the area of planetary exploration," Lii continues.
The project is also relevant to a future Mars mission: from orbit, the astronaut can dispatch the robot to different positions on the planet without actually having to land and visit the site. Instead, the astronaut merely monitors the process and sends instructions that lay out the sequence of tasks to the robot. Activities that would be dangerous for astronauts can also be delegated to the robot. The long-term objective of the project is to enable human/robot collaboration in aerospace scenarios for the purpose of researching and colonising distant planets.
This project is a joint collaboration between DLR, the ESA European Astronaut Centre, the Danish Aerospace Company, the German Space Operations Center (GSOC) at DLR, Airbus and the US American space agency NASA. The German ESA astronaut Alexander Gerst will also be conducting tasks as part of the METERON experiment during his Horizons mission on board the ISS in the coming year.
Albu-Schäffer explains that the exploited technologies are also finding application on Earth: “At the end of July 2017 State Minister Ilse Aigner launched the Bavarian project SMiLE. This project enables family members to control assistance robots in the homes of a relative that requires care using the same tablet app – a revolutionary transfer of aerospace applications to special living environments.”


{kind=link}
{kind=link}