25. August 2017 | Astronaut im All übt Zusammenarbeit mit Roboter auf der Erde für zukünftige Marsmissionen
"Justin, bitte übernehmen!"
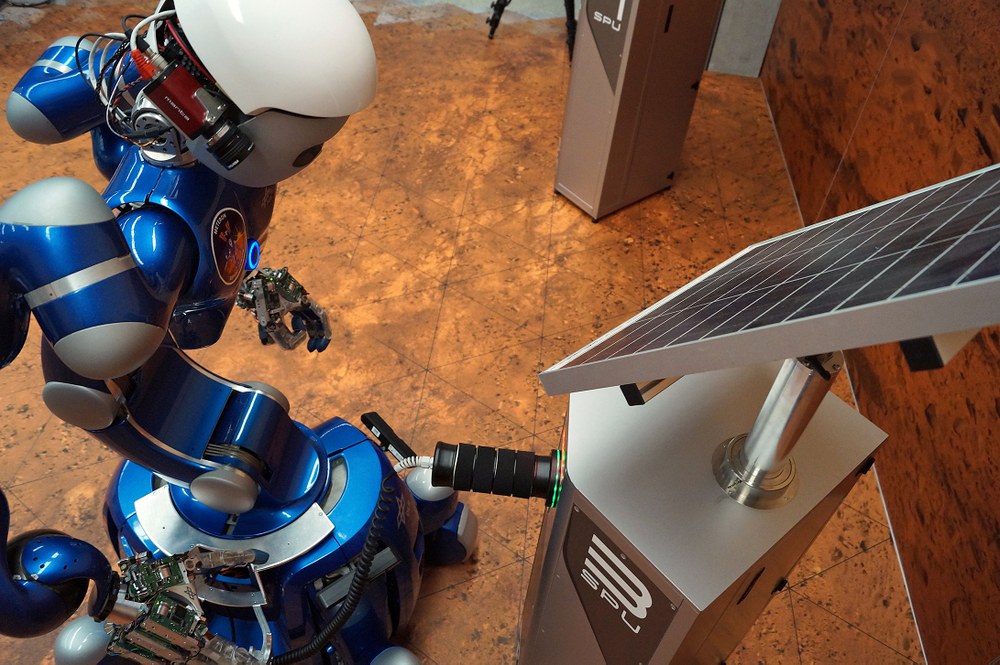
Wartung einer Solaranlage
Im Rahmen des METERON SUPVIS Justin-Experiments am 25. August 2017 setzte DLR-Roboter "Rollin' Justin" verschiedene Aufgaben selbstständig um. Die Aufträge erteilte ESA-Astronaut Paolo Nespoli per Tablet-PC von der ISS aus.
Im Bild: Rollin' Justin hat sich mit einer Solaranlage verbunden und liest die Daten aus. Entsprechend der Fehleranalyse führt der robotische Co-Worker anschließend die erforderlichen Wartungsarbeiten aus.
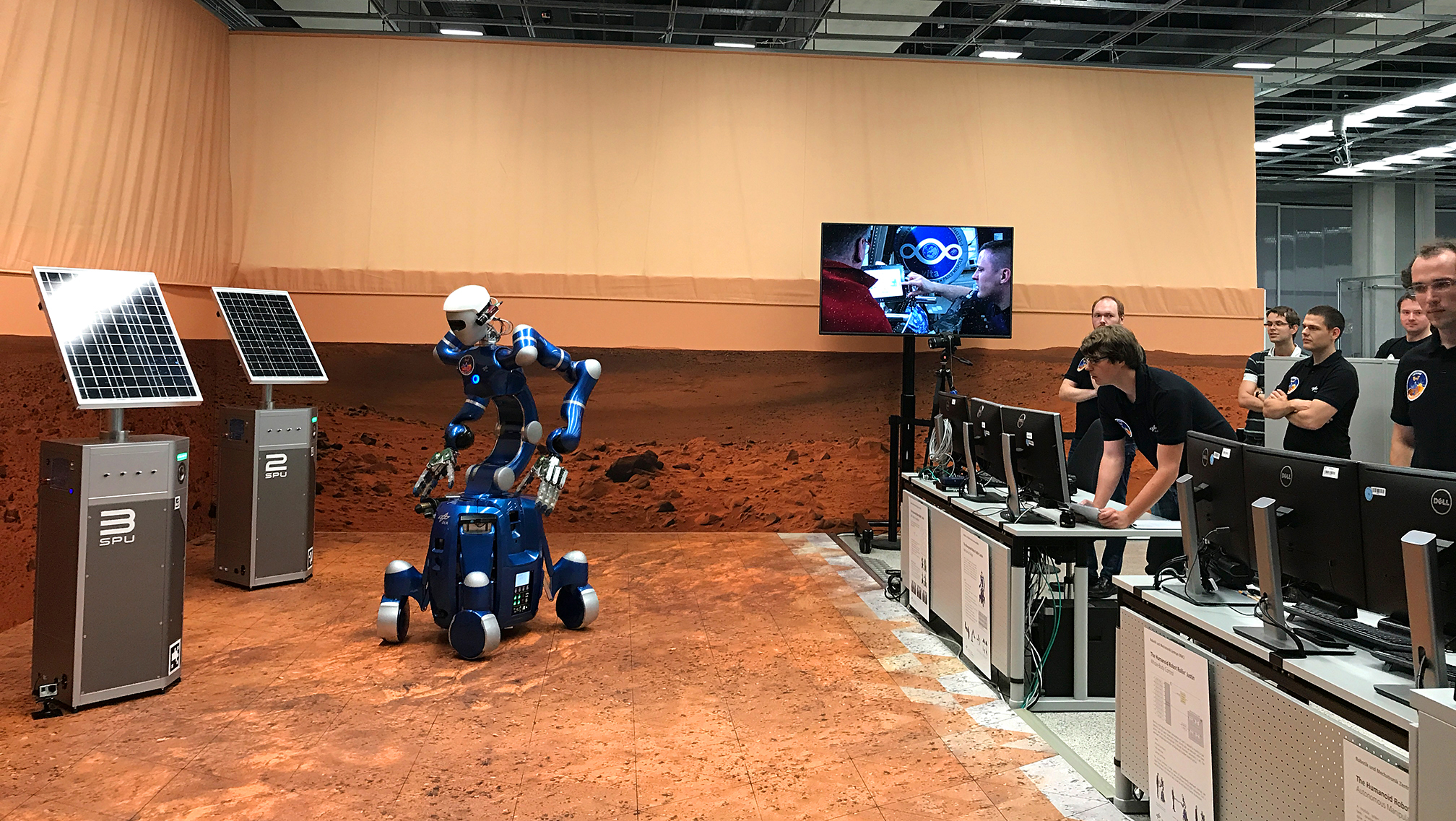
Rollin' Justin steuert eine Solaranlage für Wartungsarbeiten an. Auf dem Bildschirm im Hintergrund ist ESA-Astronaut Paolo Nespoli live von der Internationalen Raumstation zugeschaltet, welcher den Roboter aus der Ferne navigieren lässt.
Ein Befehl, eine Eingabe aus der Ferne und DLR-Roboter Rollin' Justin führt selbstständig eine komplexe Aufgabe aus - eine wichtige Fähigkeit für künftige Marsmissionen und den Einsatz in lebensfeindlichen Umgebungen auf der Erde.
Erstmalig konnte am 25. August 2017 der italienische ESA-Astronaut Paolo Nespoli von der Internationalen Raumstation (ISS) aus den Roboter "Rollin’ Justin" beim Deutschen Zentrum für Luft-und Raumfahrt (DLR) fernsteuern: Der Roboter im DLR-Institut für Robotik und Mechatronik in Oberpfaffenhofen wurde dabei mit einem Tablet von der ISS aus gesteuert – bei der Durchführung verschiedener Aufgaben ist Justin dann anschließend auf sich allein gestellt und muss mithilfe künstlicher Intelligenz entscheiden, wie einzelne Arbeitsschritte auszuführen sind. Diese Aufgaben sind Teil des "SUPVIS Justin"-Experiments und werden im Rahmen des METERON-Projekts (Multi-Purpose End-to-End Robotic Operation Network) zusammen mit der europäischen Raumfahrtorganisation ESA durchgeführt.
Steuerung aus dem All
"Mit dem SUPVIS-Justin-Experiment setzen wir den Grundstein für die Zusammenarbeit von Astronauten und intelligenten, humanoiden Robotern bei der Besiedlung fremder Planeten und Monden", sagt Prof. Alin Albu-Schäffer, Leiter des DLR-Instituts für Robotik und Mechatronik. "Weil der Roboter über leistungsfähige lokale Intelligenz verfügt, reicht für den Astronauten ein Tablet-PC aus, um den Roboter bei komplexen Tätigkeiten anzuleiten", so Albu-Schäffer.
In diesem ersten Experiment der Reihe befiehlt der ESA-Astronaut Paolo Nespoli dem Roboter Rollin’ Justin, eine eigens im Labor in Oberpfaffenhofen eingerichtete Solaranlage zu warten, den Zustand mehrerer Solarpaneele zu überprüfen und etwaige Fehler zu beheben. Im März diesen Jahres hatte Nespoli den Versuchsaufbau um Rollin‘ Justin in Oberpfaffenhofen kennengelernt und mit dem DLR-Forschungsteam um Dr. Neal Lii verschiedene Fragestellungen diskutiert. Im Mai trainierte der Astronaut Paolo Nespoli die Versuchsreihe im Europäischen Astronautenzentrum (EAC) in Köln.
Blick auf eine zukünftige Marsmission
"Für das ‚METERON SUPVIS Justin‘-Team am DLR und bei der ESA ist es eine besondere Aufgabe, die Telerobotik im Bereich der Raumfahrt voranzubringen, und zwar mit Blick auf eine effizientere Erforschung unseres Sonnensystems", unterstreicht Lii. "Mit diesem Projekt möchten wir bestehende Grenzen überwinden, um aus Robotern ernstzunehmende Co-Worker für verschiedene Aufgaben in der Raumfahrt zu machen. Im Bereich der planetaren Exploration sollen so auf lange Sicht die Astronauten entlastet werden", führt Lii weiter aus.
Relevanz hat das Projekt auch für eine zukünftige Marsmission: Der Astronaut kann dann im Orbit von einem Raumschiff aus Roboter zu unterschiedlichen Stellen des Planeten steuern, ohne dafür landen und vor Ort sein zu müssen. Der Astronaut überwacht vielmehr lediglich den Ablauf und gibt dem Roboter die Reihenfolge der Aufgaben vor. Für den Astronauten gefährliche Tätigkeiten können ebenfalls an den Roboter delegiert werden. Die langfristige Zielsetzung des Projekts ist die Mensch-Roboter-Kooperation in der Raumfahrt mit Blick auf die Erforschung und Besiedlung entfernter Planeten.
Auf der Erde finden die Technologien ebenfalls Anwendung, wie Albu-Schäffer erklärt: "Erst Ende Juli 2017 startete Staatsministerin Ilse Aigner das bayerische Projekt SMiLE, in dem die gleiche Tablet-App Angehörigen erlauben soll, Assistenzroboter in Wohnungen von unterstützungsbedürftigen Personen zu steuern - ein zukunftsweisender Transfer vom All in besondere Lebensumgebungen."



{kind=link}
{kind=link}
{kind=link}