Preparing for an asteroid landing – the MASCOT Control Center in contact with the MASCOT lander
July 6, 2018
Preparing for an asteroid landing – the MASCOT Control Center in contact with the MASCOT lander
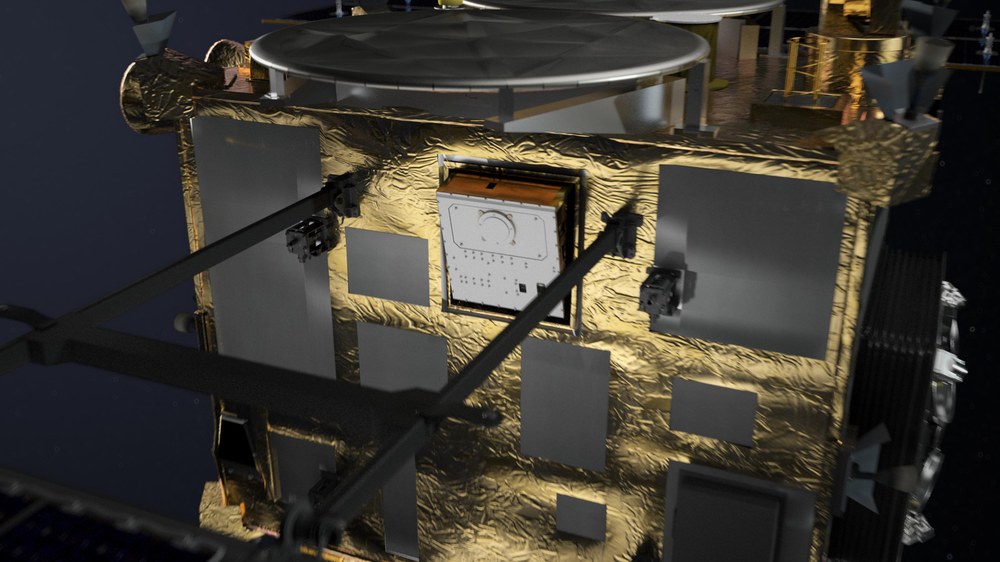
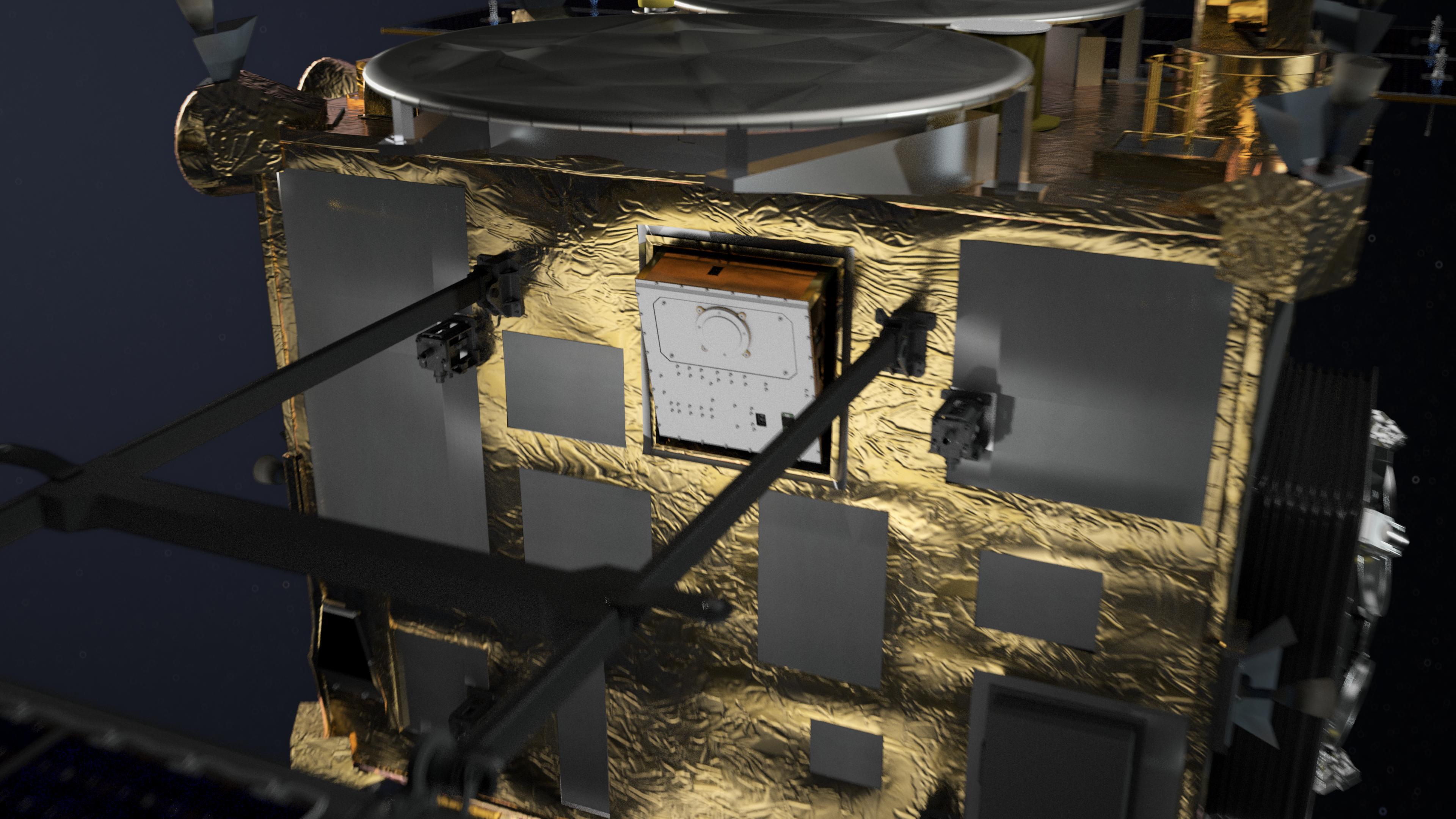
MASCOT asteroid lander on board the Hayabusa2 spacecraft
The Japanese Hayabusa2 spacecraft with the German-French Mobile Asteroid Surface Scout (MASCOT) lander on board has completed its 3200-million-kilometre journey to asteroid Ryugu.
A total of four instruments are installed within the 30 × 30 × 20-centimetre lander. A DLR radiometer and camera, together with a spectrometer from the Institut d’Astrophysique Spatiale and a magnetometer from Technical University Braunschweig are set to examine the mineralogical composition and geological properties of the asteroid’s surface and measure its surface temperature and magnetic field. MASCOT’s swing arm will provide it with the kinetic energy required to perform its manoeuvres on the surface.
First signals received from asteroid lander MASCOT upon its arrival at asteroid Ryugu
Start of period of intensive landing preparations
Cooperation between Germany, France and Japan
Focus: space, exploration, robotics
On 6 July 2018 at 03:15 CEST (01:15 UTC), it was time. The team at the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) MASCOT Control Center in Cologne received the first signals from the German-French asteroid lander MASCOT upon its arrival at the near-Earth asteroid Ryugu. On 27 June 2018, the lander reached the asteroid aboard the Japanese space probe Hayabusa2 after a three-and-a-half year journey through space. For the first time this year, the researchers have contact with MASCOT and are presently checking all the on-board systems and instruments. "Now begins the period of intensive landing preparations, because we can only intervene to a limited extent during the landing," says MASCOT Ground Segment and Operations Manager Christian Krause from the DLR Microgravity User Support Center (MUSC).
MASCOT will only be accessible from Earth for a limited number of time windows when landing on Ryugu, with commands to the lander and a response back to Earth taking more than 30 minutes. During the approximately 16-hour-long measurement operation on the surface, MASCOT has to be largely left to its own devices, and the landing exercises and tests on the ground are therefore of particular importance. "We have subjected all of the landing sequences to extensive testing using a ground model of MASCOT," explains Krause. "With the model we can, for example, test the system sequences during movement and realignment, as well as examine the scientific processes of the experiments on board." Since the launch of Hayabusa2 and MASCOT on 3 December 2014, the researchers have, together with JAXA, been working through and refining the landing sequences and instrument calibrations with the ground model. For the most part, they have had to work without much information about the asteroid and make broad assumptions about the surface conditions and reflectivitywhich they can now adapt and refine.
A leap into the unknown
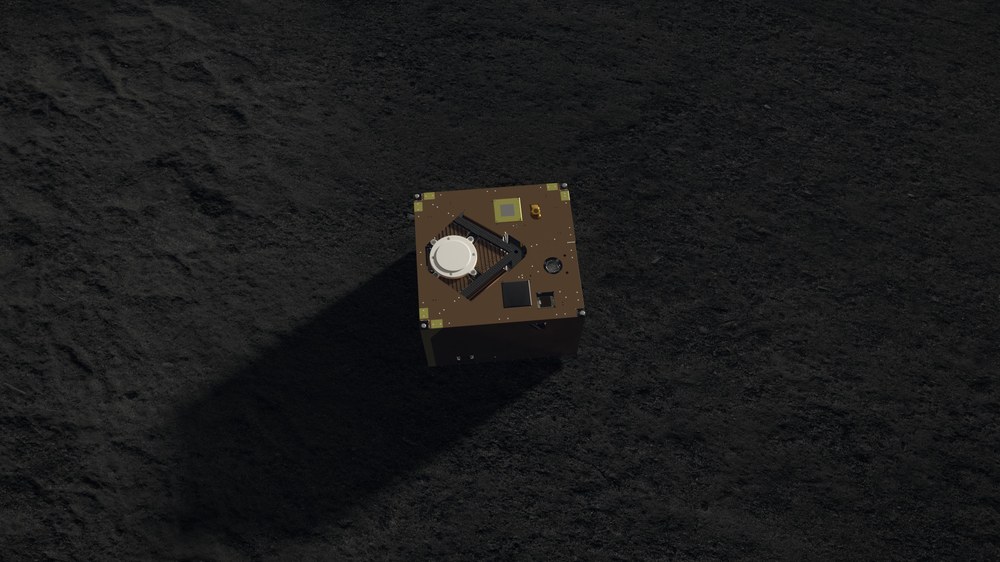
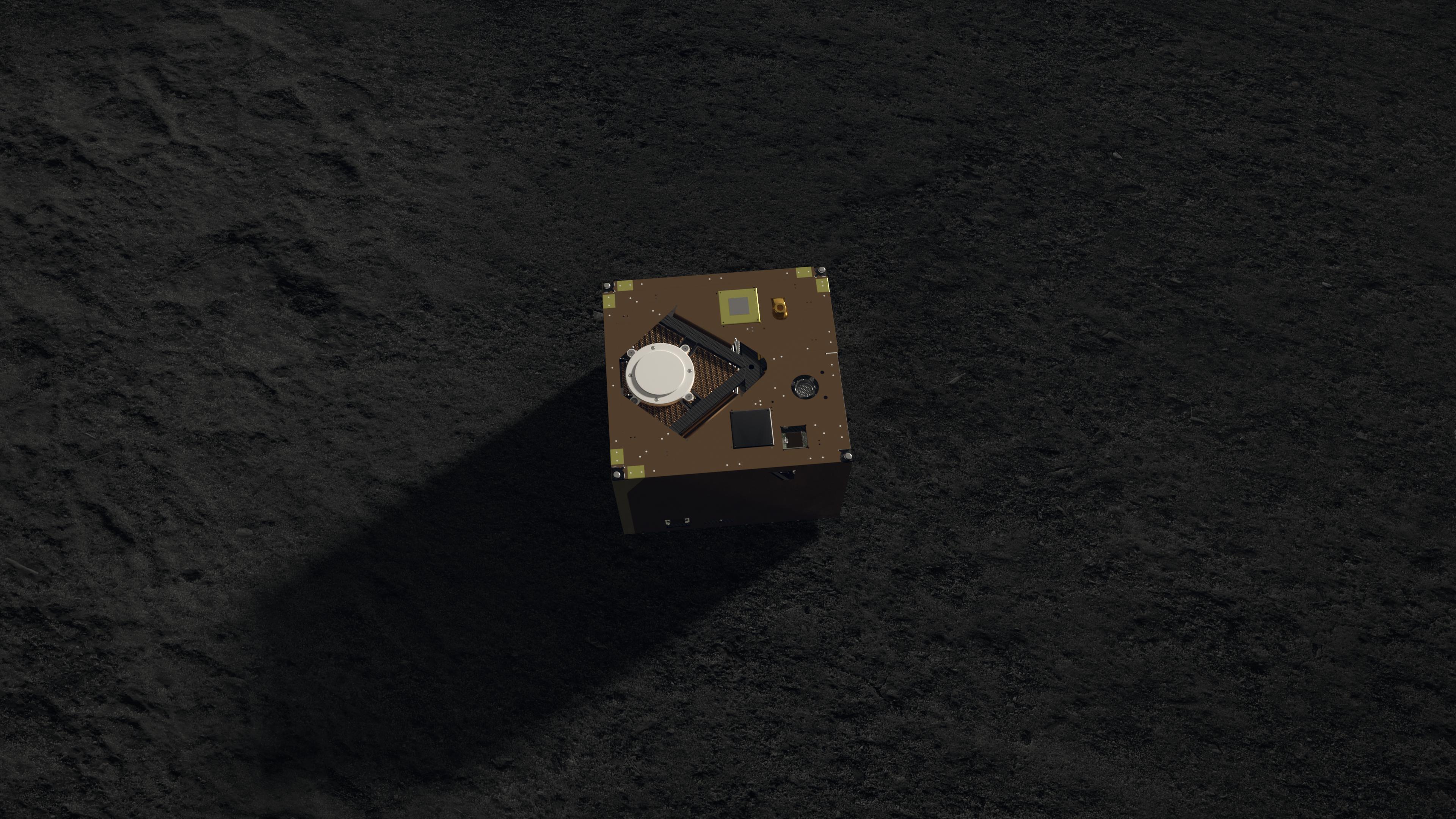
"Our goal is to collect as much data as possible during the landing and the measurement phase. To do this, we must prepare the processes as robustly as possible for the inhospitable and unpredictable environment on the asteroid surface," says MASCOT Project Manager Tra-Mi Ho from the DLR Institute of Space Systems. Four instruments are installed inside the 30 × 30 × 20 centimetre lander, which weighs only 10 kilograms. The mineralogical and geological composition of the asteroid surface will be investigated and the surface temperature and magnetic field of the asteroid determined by means of a radiometer and a camera from DLR, a spectrometer from the Institut d'Astrophysique Spatiale and a magnetometer from TU Braunschweig. MASCOT will receive the necessary kinetic energy for its 'jumping' manoeuvres on the surface via a built-in swing arm. "The instruments and systems will now undergo another health check upon arrival, as they have done each year during the trip to Ryugu," explains Tra-Mi Ho.
The landing site selection for MASCOT is planned for mid-August together with the partners from the French space agency CoRoT Special and the Japanese space agency JAXA - GLOBAL. "Then it will be very exciting for us at the MASCOT Center before landing, when we refine the landing procedures with the last details," says Christian Krause. “However, even if we know the landing site we have to be prepared for many eventualities, because MASCOT's movement on the surface after the first contact is unpredictable. It is conceivable that MASCOT will come to rest after the first contact with Ryugu.” Here the research team uses the flight dynamics calculations of the French colleagues of the CNES, in order to be able to estimate the range of action of MASCOT as accurately as possible. This is also important for the pre-programmed 'jumps' of up to 70 metres in order to perform measurements at various points on the asteroid surface.
About the Hayabusa2 mission and MASCOT
Hayabusa2 is a Japanese space agency (Japan Aerospace Exploration Agency; JAXA) mission to the near-Earth asteroid Ryugu. The German-French lander MASCOT on board Hayabusa2 was developed by the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) and built in close cooperation with the French space agency (Centre National d'Etudes Spatiales; CNES). DLR, the Institut d'Astrophysique Spatiale and Technical of University Braunschweig have contributed the scientific experiments on board MASCOT. The MASCOT lander and its experiments are operated and controlled by DLR with support from CNES and in constant interaction with the Hayabusa2 team.
The DLR Institute of Space Systems in Bremen was responsible for developing and testing the lander together with CNES. The DLR Institute of Composite Structures and Adaptronics in Braunschweig was responsible for the stable structure of the lander. The DLR Robotics and Mechatronics Center in Oberpfaffenhofen developed the swing arm that allows MASCOT to hop on the asteroid. The DLR Institute of Planetary Research in Berlin contributed the MasCam camera and the MARA radiometer. The asteroid lander is monitored and operated from the MASCOT Control Center in the Microgravity User Support Center (MUSC) at the DLR site in Cologne.


{kind=link}
{kind=link}
{kind=link}