So far and yet so near: Alexander Gerst controls robot on Earth
August 17, 2018 | ISS experiment METERON SUPVIS Justin – the future of human-robot cooperation in space
So far and yet so near: Alexander Gerst controls robot on Earth
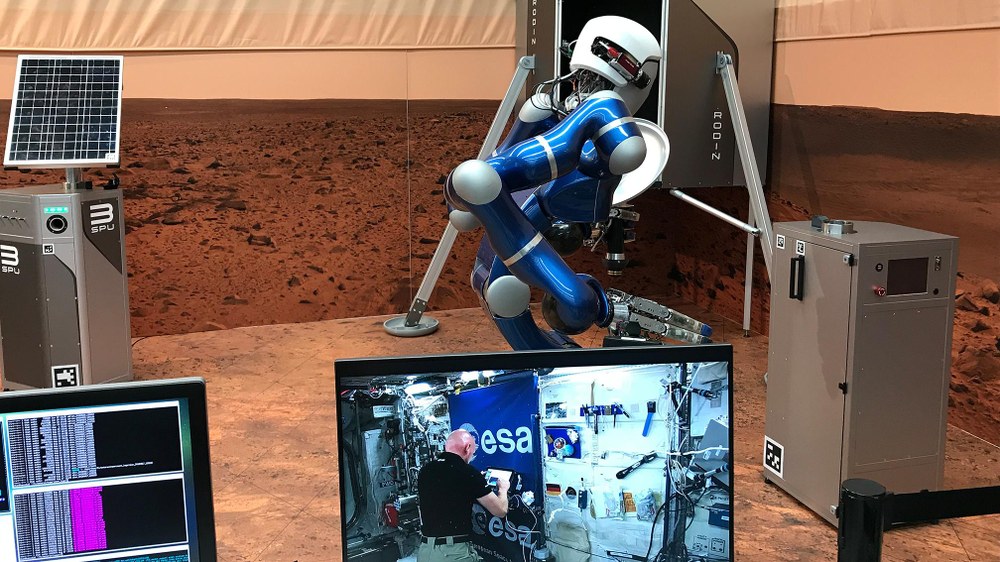
Alexander Gerst controls the DLR robot Rollin’ Justin
Perfect teamwork between the German ESA astronaut Alexander Gerst on board the ISS and the DLR robot Rollin' Justin in the Mars Laboratory of the DLR Institute of Robotics and Mechatronics. The particular challenge presented by this experiment lay in the high degree of autonomy enjoyed by the astronaut and the extended scope for activity by his robot colleague.
Live robotics experiment between the ISS and Earth
The latest experiment in the METERON SUPVIS Justin project was successfully completed on 17 August 2018 at the DLR Institute of Robotics and Mechatronics in Oberpfaffenhofen, with human and machine working hand in hand. An astronaut on board the ISS used a tablet PC to assign the robot Rollin’ Justin complex exploratory tasks, which were executed by the astronaut’s humanoid ‘colleague’ on Earth. This was largely achieved without intervention, making this AI experiment crucial for future space missions and industrial applications.
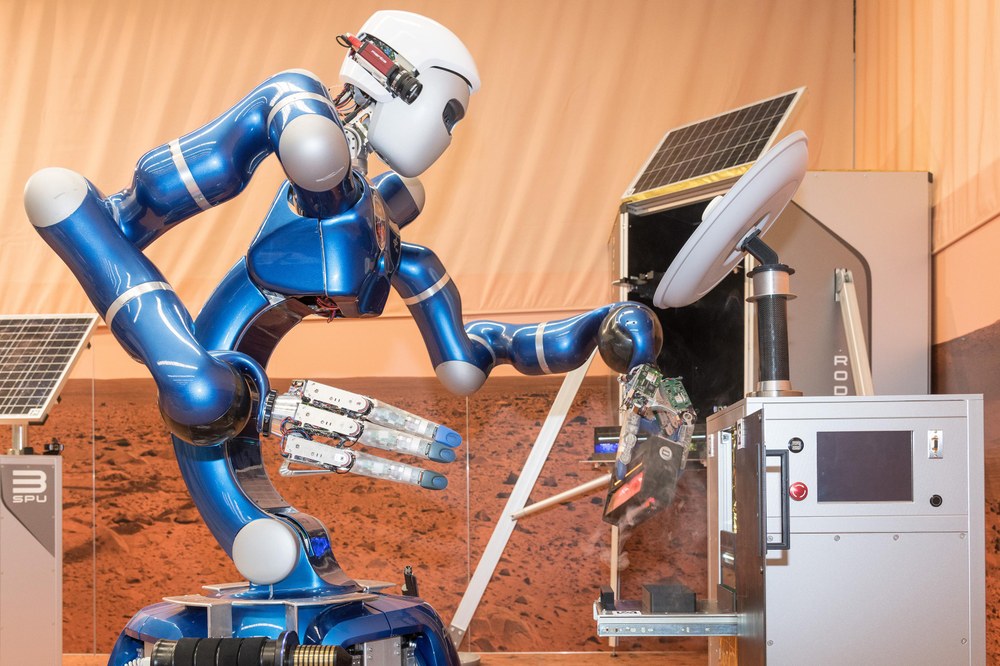
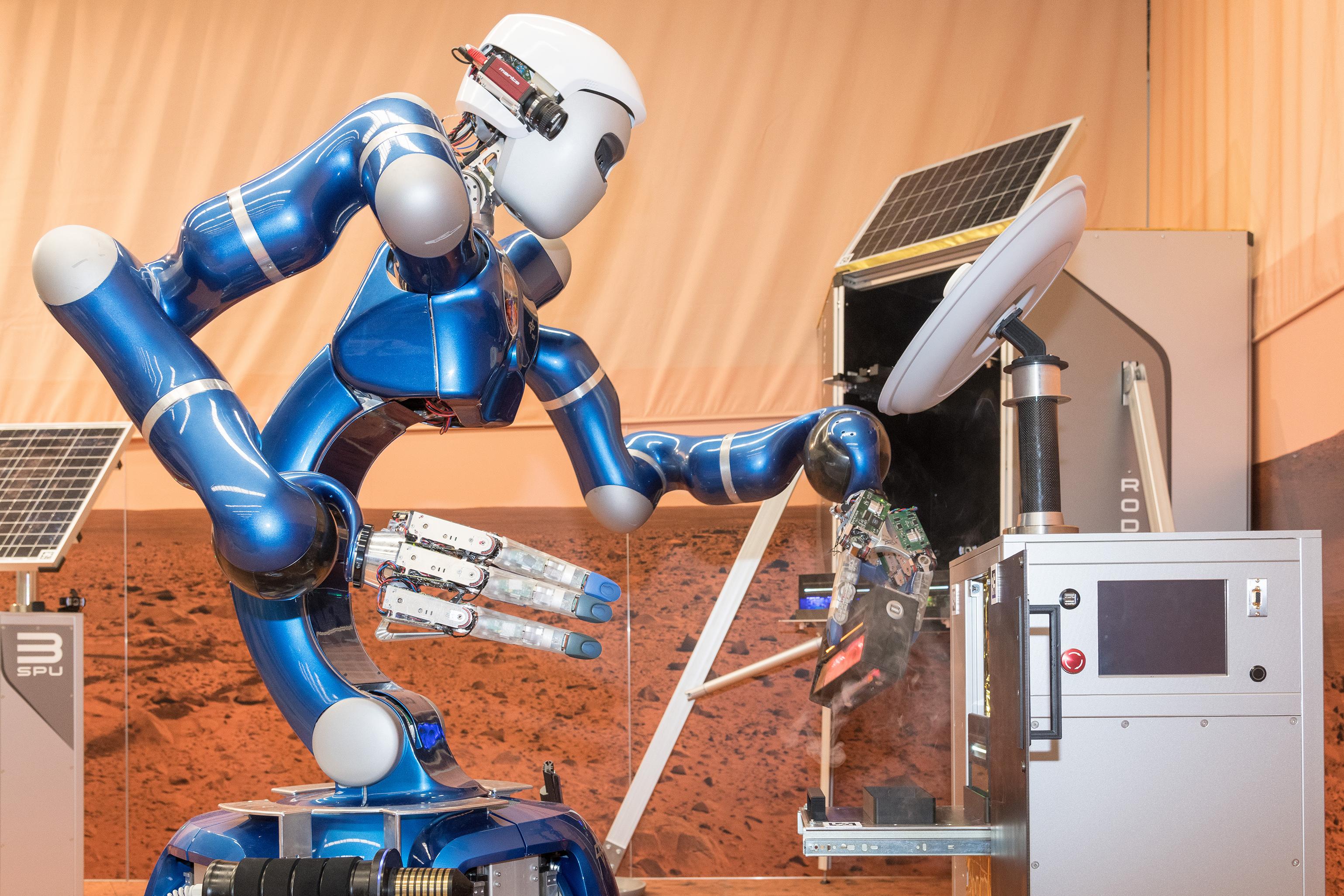
The simulation of an emergency was the most critical part of the experiment carried out on 17 August 2018, in which Alexander Gerst, on board the ISS, had to react spontaneously to an unknown malfunction. The German ESA astronaut succeeded in assigning new tasks to the humanoid DLR robot, known as Rollin’ Justin, in order to replace a burnt-out module in a satellite receiving system.
The latest ISS telerobotics experiment METERON SUPVIS Justin took place on 17 August 2018 at the DLR Institute of Robotics and Mechatronics.
One special feature of the experiment was the robot's high degree of autonomy enjoyed by the astronaut and the expanded range of activities performed by his robotic co-worker.
Areas of focus: space travel, 'horizons' mission, robotics
Alexander Gerst pauses. Smoke is rising from the satellite receiving system that he is in the process of building with the help of his robotic avatar on Mars. Now it is a matter of acting quickly and decisively, for the sake of human and machine alike. The simulation of an emergency is the most critical part of the latest telerobotics experiment at the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR), whereby an astronaut on board the International Space Station (ISS) uses a tablet to remotely control the humanoid robot Rollin' Justin in Oberpfaffenhofen. The last of three METERON SUPVIS Justin experiments took place on 17 August 2018 in the Mars Laboratory of the DLR Institute of Robotics and Mechatronics, with support successfully provided by the German ESA astronaut Alexander Gerst as part of his 'horizons' mission.
The innovative nature and special challenge of this experiment lay in the high degree of autonomy enjoyed by the astronaut and the extended scope for action by his robot colleague. Gerst not only had to master the most complex telerobotic tasks ever conducted in space, but also to react to unexpected situations.
"Intelligent robots will play an important role in the future of astronautical space travel, particularly on exploration missions. They can support the work of people in orbit and on Earth to explore difficult-to-access high-risk regions," says Hansjörg Dittus, DLR Executive Board Member for Space Research and Technology. "The technology and findings resulting from the METERON SUPVIS Justin experiment will also make it possible to develop an array of applications on Earth. This is particularly pertinent to fields that require reliable and safe cooperation and interaction between people and machines, such as assistance and care robotics or industrial construction and maintenance." As recently as May, the DLR Institute of Robotics and Mechatronics presented its SMiLE project, which is developing robots to provide care for the elderly and physically impaired.
A foundation for future space missions
Rollin' Justin was controlled intuitively, with Gerst using the tablet to determine which work steps would be carried out by the robot, without specifying exactly how they should be executed. The humanoid robot performs basic tasks informed by the context, and uses its artificial intelligence to make the necessary decisions. As part of the European Union's METERON (Multi-Purpose End-to-End Robotic Operation Network) range of experiments, robotics experts at DLR have further developed their telerobotics technologies and created realistic scenarios for planetary exploration. This has proven that robotic co-workers can provide valuable and sometimes even vital support for humans, and can be used for a wide range of exploratory, construction and maintenance tasks.
"Our aim is to demonstrate that robotic co-workers could be deployed on distant planets or the Moon. They could help us to create the first colony in space. The operating concepts and technology that we are continuously developing for this purpose should form the basis for robotic space missions in future," says Neal Lii, the project manager at the DLR Institute of Robotics and Mechatronics.
To ensure that the scenario was as realistic as possible, Alexander Gerst and Rollin' Justin were left on their own to carry out their task, largely without contact with the ground crew. Despite such constraints, the German ESA astronaut was able to interact intuitively with his robot colleague and succeeded in managing even the most complex tasks – from servicing a solar unit to constructing a receiving station. The highlight of the two-hour live experiment was the successful replacement of the station module, which suddenly burst into flames. The METERON SUPVIS Justin team was thus able to demonstrate that intelligent robots can support humans even in unexpected situations in remote locations, in much the same way that an on-site work colleague would.
About the missions
The German ESA astronaut Alexander Gerst embarked on his second long-term mission – Alexander Gerst Blog – to the Internationalen Raumstation ISS on 6 June 2018. By the time he returns to Earth in December 2018, Gerst will have worked on a total of 67 European experiments, 41 of which are German. These should contribute towards devising solutions to global societal challenges such as health, the environment and climate change, not to mention digitalisation, Industry 4.0, energy and future mobility.
The METERON SUPVIS Justin experiment is a collaborative enterprise between DLR and the ESA - European Space Agency. The ISS and the Columbus module serve as the ideal test environment for the use of new telerobotics technologies. Support was provided by the Columbus Control Center, part of the German Space Operations Center (GSOC) at DLR's site in Oberpfaffenhofen, near Munich. The Columbus Control Center (Col-CC) is responsible for running the ISS Space Laboratory and has been working round the clock for 10 years. In total, around 80 GSOC employees are engaged in European research work on the ISS.
Replay of the experiment Livestream:
ESA Astronaut Dr. Alexander "Astro-Alex" Gerst steuert im Rahmen der dritten ISS Crew Session des METERON SUPVIS Justin Experiments den humanoiden Roboter "Rollin' Justin" live von der Internationalen Raumstation (ISS). Der Roboter befindet sich in einer simulierten Marsumgebung im Robotik und Mechatronik Zentrum des DLR, Oberpfaffenhofen. In dieser ISS Crew Session kommandiert Dr. Gerst Justin in mehreren Aufgaben, die zu den komplexesten telerobotischen Aufgaben gehören, die je vom Orbit aus ausgeführt wurden. Dazu gehört die Reparatur und Installation von Hardware mit bisher ungekannter robotischer Fingerfertigkeit. Unser Ziel ist es zu zeigen, dass es machbar ist, robotische "Kollegen" auf dem Mond oder weiter entfernten Himmelskörpern einzusetzen um mit ihrer Hilfe die erste Weltraumkolonie oder das erste Weltraumhabitat zu errichten. Das Projekt wurde durch das Robotik und Mechatronik Zentrum des DLR zusammen mit ESAs Human Robot Interaction Lab initiiert. Weitere Partner sind das Deutsche Raumfahrtkontrollzentrum, das Europäische Astronautenzentrum, die Danish Aerospace Company, Airbus und die NASA.
METERON SUPVIS Justin experiment with Alexander Gerst
Your consent to the storage of data ('cookies') is required for the playback of this video on Youtube.com. You can view and change your current data storage settings at any time under privacy.
METERON SUPVIS Justin experiment with Alexander Gerst
ESA Astronaut Dr. Alexander "Astro-Alex" Gerst steuert im Rahmen der dritten ISS Crew Session des METERON SUPVIS Justin Experiments den humanoiden Roboter "Rollin' Justin" live von der Internationalen Raumstation (ISS). Der Roboter befindet sich in einer simulierten Marsumgebung im Robotik und Mechatronik Zentrum des DLR, Oberpfaffenhofen. In dieser ISS Crew Session kommandiert Dr. Gerst Justin in mehreren Aufgaben, die zu den komplexesten telerobotischen Aufgaben gehören, die je vom Orbit aus ausgeführt wurden. Dazu gehört die Reparatur und Installation von Hardware mit bisher ungekannter robotischer Fingerfertigkeit. Unser Ziel ist es zu zeigen, dass es machbar ist, robotische "Kollegen" auf dem Mond oder weiter entfernten Himmelskörpern einzusetzen um mit ihrer Hilfe die erste Weltraumkolonie oder das erste Weltraumhabitat zu errichten. Das Projekt wurde durch das Robotik und Mechatronik Zentrum des DLR zusammen mit ESAs Human Robot Interaction Lab initiiert. Weitere Partner sind das Deutsche Raumfahrtkontrollzentrum, das Europäische Astronautenzentrum, die Danish Aerospace Company, Airbus und die NASA.


{kind=link}
{kind=link}
{kind=link}
