Robotics team practises lunar exploration on Mount Etna
July 1, 2022 | Helmholtz Future Project ARCHES completed
Robotics team practises lunar exploration on Mount Etna
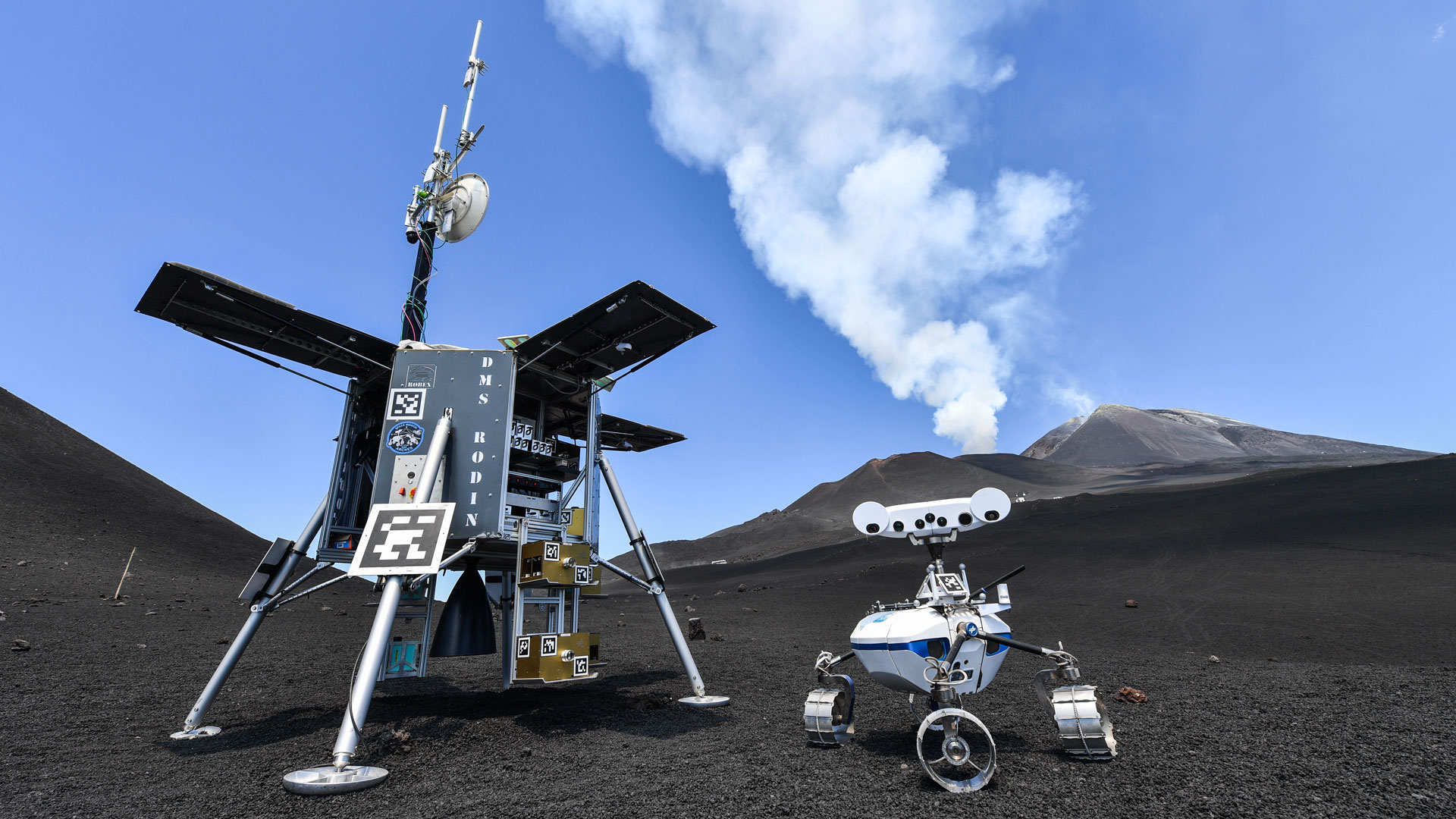
LRU1 robot and RODIN lander
LRU1 (Lightweight Rover Unit 1, right) evaluates surface samples using its cameras. It is the 'scientist' in the team. The RODIN lander carries various containers ready for the robots. Three scenarios with robots were demonstrated on the Mount Etna volcano (Sicily, Italy). The lava landscape resembles the surface of the Moon.
LRU2 (Lightweight Rover Unit 2) has a gripper arm and several tools in its 'luggage'. For example, it can choose to use a shovel or a gripper hand to pick up soil or rock samples. LRU2 weighs approximately 30 kilograms and travels at a speed of four kilometres per hour. It is considered to be an 'assistant' in the team.
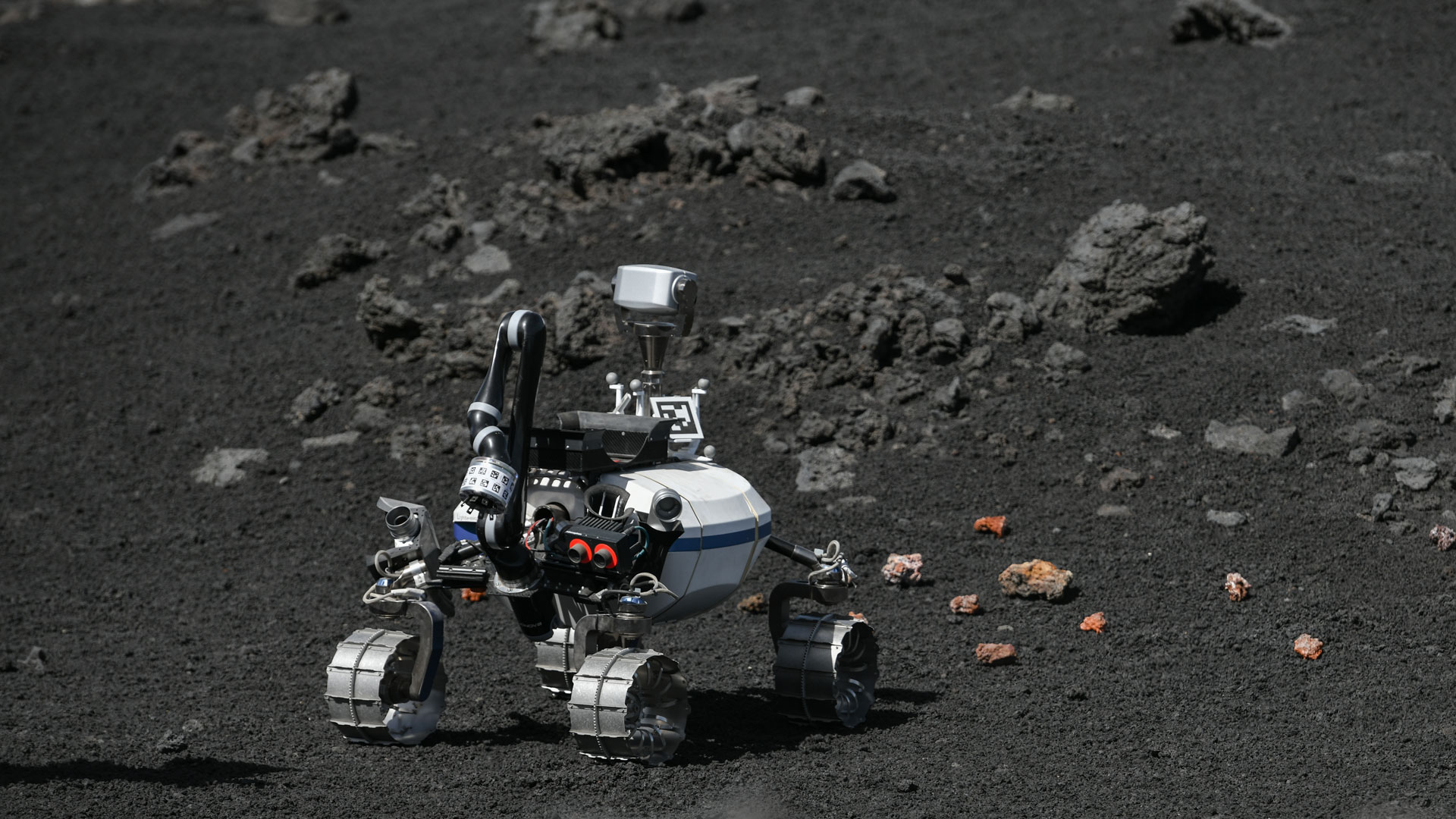
LRU1 (Lightweight Rover Unit 1) performs tasks in the robot team together with its robotic colleagues. LRU is the prototype of a mobile robot for exploration in unknown, rugged and difficult-to-access terrain. The cameras are used to map the area.
Robots can enter areas that are dangerous for or inaccessible to humans. They can even explore other planets – or the Moon. This has now been demonstrated on Mount Etna, a volcano in Italy. Various robots completed their tasks independently – they took rock samples, analysed them and forwarded the results to their control centre. Two other scenarios were demonstrated in addition to this mission, which was named 'Geological Mission I'. These complete the Helmholtz Future Project Autonomous Robotic Networks to Help Modern Societies (ARCHES). The German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) led the project. The lava landscape on the Sicilian volcano Mount Etna resembles the surface of the Moon, so it is well suited to serve as a test environment. In addition to the loose, coarse-grained surface composition, the solidified lava layers also present realistic challenges for exploration missions.
"Teams of mobile robots have an important role to play in future space missions. Operating in heterogeneous teams, the robots complement and support each other with their different capabilities. They serve as an extension of human arms and eyes," explains Armin Wedler, Project Manager at the DLR Institute of Robotics and Mechatronics. In 'Geological Mission I', two robots moved around together autonomously. They were joined by a drone. The Lightweight Rover Unit 1 (LRU1) robot evaluated soil samples using its cameras and is considered the 'scientist' of the team. LRU2 took on the role of 'assistant', collecting surface samples and analysing them using Laser-Induced Breakdown Spectroscopy (LIBS). This technique directs a powerful, pulsed laser beam onto the sample. The material partially vaporises, allowing LIBS to detect different elements in the resulting plasma. LIBS was developed by the DLR Institute of Optical Sensor Systems. LRU2 also transports storage containers, has space for tools and ensures that LRU1 always has WiFi. The ARDEA drone is considered the 'scout' for the team and mapped the area. Due to the strong winds that were present on Etna at times, the capabilities of ARDEA and LIBS could not be used on all experiment iterations.
The three scenarios are based on different overall conditions
'Geological Mission I' was based on a concept in which scientists monitor the tasks of the robots from Earth. 'Geological Mission II', which also took place on Mount Etna, is different, as in this case the robots would be controlled from a station in orbit. In addition to LRU1 and LRU2, the Interact rover collected rock samples and brought them to a lander. The Interact Rover has a camera arm and a gripper arm that also provide haptic feedback. This means that the remote scientists can obtain a tactile 'feel' for the rock samples. The Karlsruhe Institute of Technology (KIT) has developed a robotic arm with a hand as a haptic human-machine interface. The fourth robot – the Scout rover – is equipped with a WiFi repeater and positions itself so that Interact has a continuous connection to the control room. In 'Geological Mission II' the robots do not work autonomously but are guided by an astronaut.
During the demonstration mission, German astronaut Thomas Reiter carried out this task from a special control room in Catania, about 23 kilometres away. 'Geological Mission II' also marks the conclusion of the European Space Agency (ESA) 'Analog-1' campaign. In 2019, ESA astronaut Luca Parmitano controlled the Interact rover from the International Space Station (ISS) in a simulated lunar environment in the Netherlands as part of the 'Analog-1' campaign. "We have gained a lot of experience that will help us in the development of future missions. In addition to ongoing projects, we are very much looking forward to further collaboration in robotics, which will build on the findings from ARCHES," says Thomas Krüger from ESA's Human Robot Interaction Lab.
Antenna for the far side of the Moon
The third scenario, the 'LOFAR Experiment', involved simulating the installation and maintenance of a low-frequency radio antenna array. The LRU rover and the ARDEA drone demonstrated the installation of an antenna system on the far side of the Moon. A similar antenna could be directed from the lunar surface into deep space.
Helmholtz Future Project ARCHES
Heterogeneous, autonomous, networked robotic systems have been in development since 2018 as part of the Helmholtz Future Project Autonomous Robotic Networks to Help Modern Societies (ARCHES). This involves a number of different robots and fields of application. In addition to exploring the Solar System, it also opens the way for environmental monitoring of the oceans and the provision of assistance during crises on Earth.
The 'Space' demonstration mission, which eventually took place on Mount Etna, had to be postponed several times due to the COVID-19 pandemic. The 'Deep Sea' demonstration mission, also part of ARCHES, was conducted at the end of 2020.
The 'Space' demonstration mission was carried out by DLR in Catania together with the Karlsruhe Institute of Technology (KIT) and the European Space Agency (ESA). The other ARCHES project partners are the Alfred Wegener Institute (AWI, Helmholtz Centre for Polar and Marine Research) and GEOMAR (Helmholtz Centre for Ocean Research Kiel). The demonstration mission Robotic Exploration Under Extreme Conditions (ROBEX) took place on Mount Etna five years ago. ARCHES has built upon the experience gained through ROBEX.




{kind=link}
{kind=link}
{kind=link}