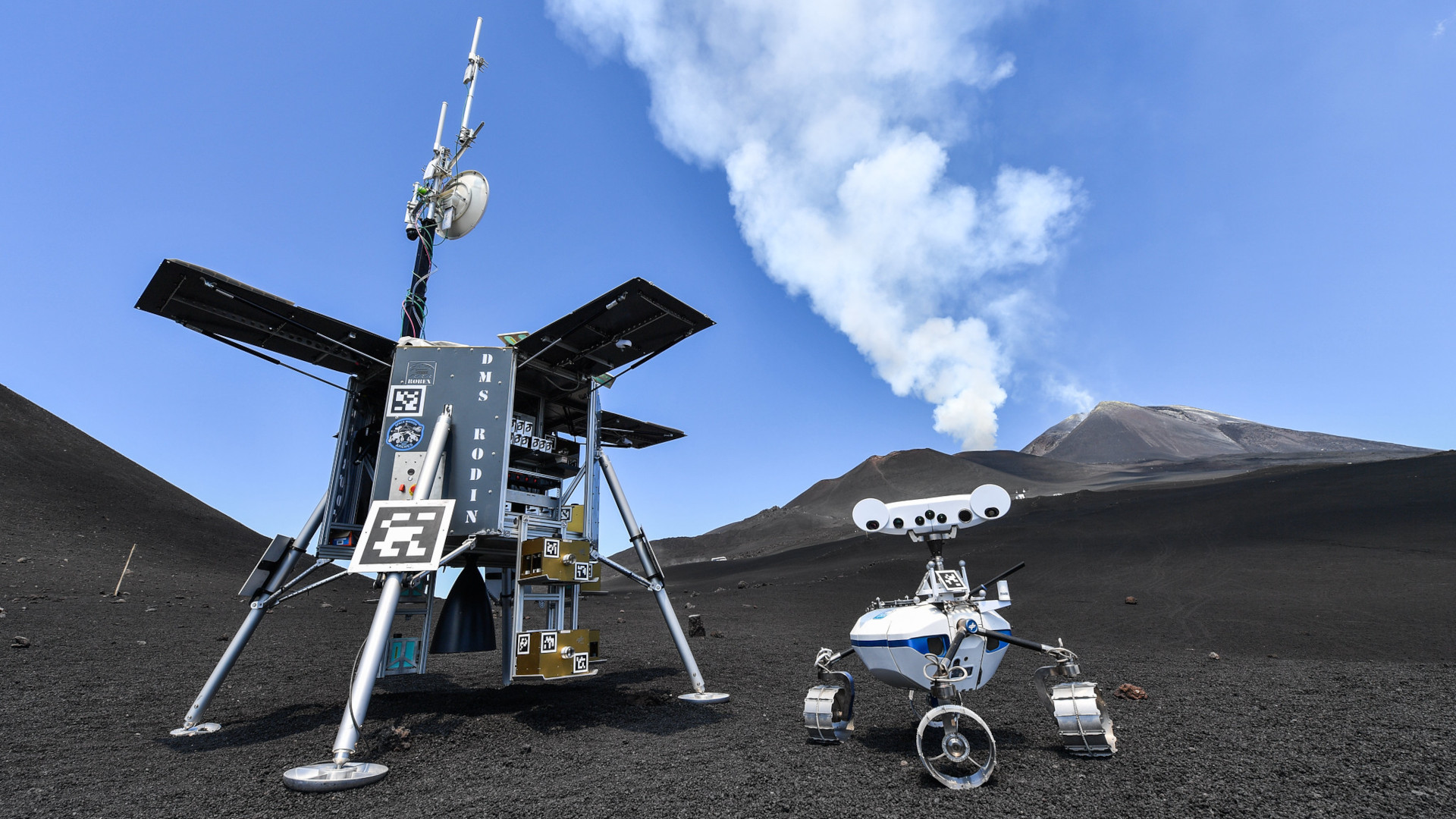
LRU1 (Lightweight Rover Unit) and the lander RODIN during the ARCHES space-analogue demonstration mission on Mount Etna. In order to test mission scenarios for robotic exploration on Earth before going to the Moon or Mars, scientists have been looking for places on Earth that come close to the conditions on another celestial body. From 13 June to 9 July 2022, Mount Etna on the Italian island of Sicily will become a 'quasi-Moon', as the volcanic landscape with its granular surface and solidified lava layers resembles the geological composition of the Moon. ARCHES stands for 'Autonomous Robotic Networks to Help Modern Societies'. Researchers use Etna's harsh environment as a 'lunar analogue'. Several rovers, a lander and a drone work together, exploring their surroundings and performing tasks.
DLR's LRU2 robot during the ARCHES space simulation on Mount Etna
The Lightweight Rover Unit 2 (LRU) during a very unusual outdoor test on Mount Etna. In order to test mission scenarios for robotic exploration on Earth before going to the Moon or Mars, scientists have been looking for places on Earth that come close to the conditions on another celestial body. From 13 June to 9 July 2022, Mount Etna on the Italian island of Sicily will become a 'quasi-Moon', as the volcanic landscape with its granular surface and solidified lava layers resembles the geological composition of the Moon. ARCHES stands for 'Autonomous Robotic Networks to Help Modern Societies'. Researchers use Etna's harsh environment as a 'lunar analogue'. Several rovers, a lander and a drone work together, exploring their surroundings and performing tasks.
Space exploration is one of the most complex scientific endeavours. It seeks to address fundamental questions, such as how the Universe came into being and whether life beyond Earth is possible. On crewed missions, humankind has reached the Moon and has set itself ambitious goals that go beyond this. Attention is increasingly turning to our neighbouring planet, Mars, as the destination for a future crewed mission. However, the risks associated with an interplanetary journey are high, the environment is hostile to life, and the distances to be travelled are enormous. The safety of the astronauts is paramount.
For this reason, spacefaring nations send autonomous robots to explore planets, moons, asteroids and comets. These must be designed in such a way that they can orient themselves, move around and perform tasks autonomously in harsh and unfamiliar environments. This is necessary because the long signal propagation times limit the control capabilities available from Earth. However, there is another option; crewed missions could be supported by robots. One possibility would be to send the robots first to build a base at the destination, equipped with the infrastructure necessary for humans. Later, they would be able to work on site to support the crew.
Etna as a lunar analogue
In order to test such mission scenarios, scientists have been looking for places on Earth that come close to the conditions on another celestial body. In the ARCHES project, Mount Etna in Italy serves as a 'substitute' for the Moon. With its granular surface, frequent earthquakes and solidified lava layers of varying extent, Etna‘s landscape resembles the geological structure of Earth's natural satellite. This enables the testing and validation of the critical core components of an actual lunar expedition. Protecting Etna, which is a UNESCO World Heritage Site, is vital, so the local environmental protection authorities have been involved in the planning for this analogue mission from the very beginning.
As one of the most active volcanoes in Europe, Etna has a history of being used as a testing ground for the robotic exploration of other celestial bodies. In 2017, the Helmholtz 'Robotic Exploration under Extreme Conditions' (ROBEX) analogue mission took place there, with the involvement of robotics experts from the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR). This initial mission tested combined robotic systems with innovative technologies for energy exchange, data transfer and as much autonomy as possible. It demonstrated that these technologies can also be used for future exploration missions. ARCHES builds on the findings of the ROBEX demonstration and is intended to refine them.
The ARCHES scenario
The ARCHES Control Centre is located in the city of Catania, which is adjacent to the Etna National Park. From there, the autonomous robots are monitored, and communications are established with the scientists on site – who can intervene where necessary. A stationary robotic component – the lander – ensures that the mobile units receive power and can exchange data. A drone maps the area from the air, supported by several rovers on the ground. Based on the data collected, the researchers in the control centre determine the most suitable areas for the robots to autonomously place measurement instruments, take soil samples and conduct geological investigations. These data will be of interest for future crewed missions, as they reveal, among other things, whether the site has materials that can be used to construct a habitat for humans – that is, whether water and 'formable' rock, which is suitable for 3D manufacturing, are available. This would allow the transport weight and costs of such an expedition to be reduced.
DLR and the Karlsruhe Institute of Technology (KIT) are working together on the space-analogue mission as part of the ARCHES project. The European Space Agency (ESA) is also a partner in this project. DLR is also involved in the second part of the project, a deep-sea-analogue mission, directed by the Helmholtz centres for Polar and Marine Research (Alfred Wegener Institute, AWI) and for Ocean Research (GEOMAR). Their findings will be communicated to all partners, with plans to make them usable independently of the respective deployment scenarios. This applies both to the hardware and the joint analysis and interpretation of data by the network’s robots and their interaction with humans.




{kind=link}
{kind=link}
{kind=link}