Erste Tests zur Landung des Martian Moons eXploration Rover
30. September 2020 | Im freien Fall zum Marsmond Phobos
Erste Tests zur Landung des Martian Moons eXploration Rover
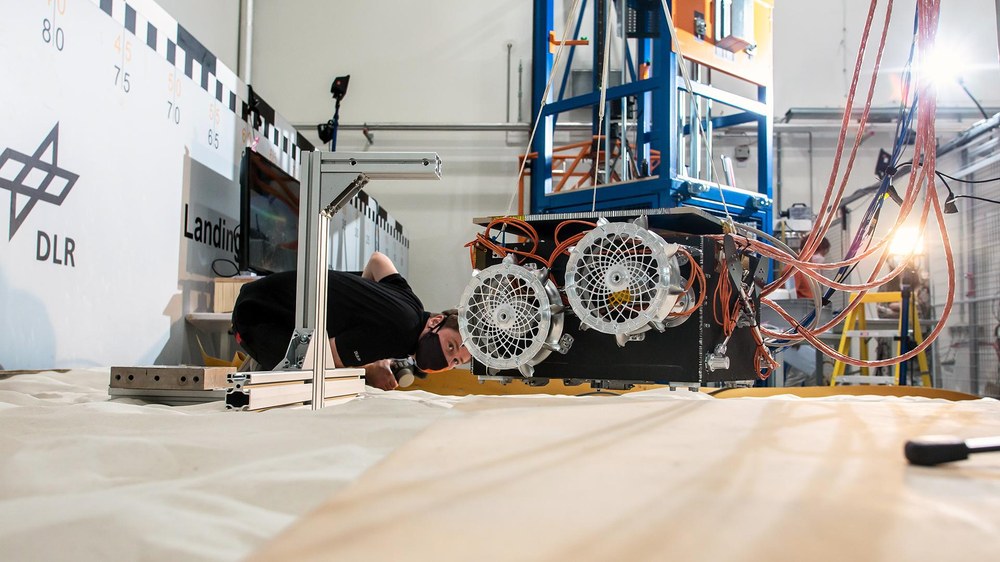
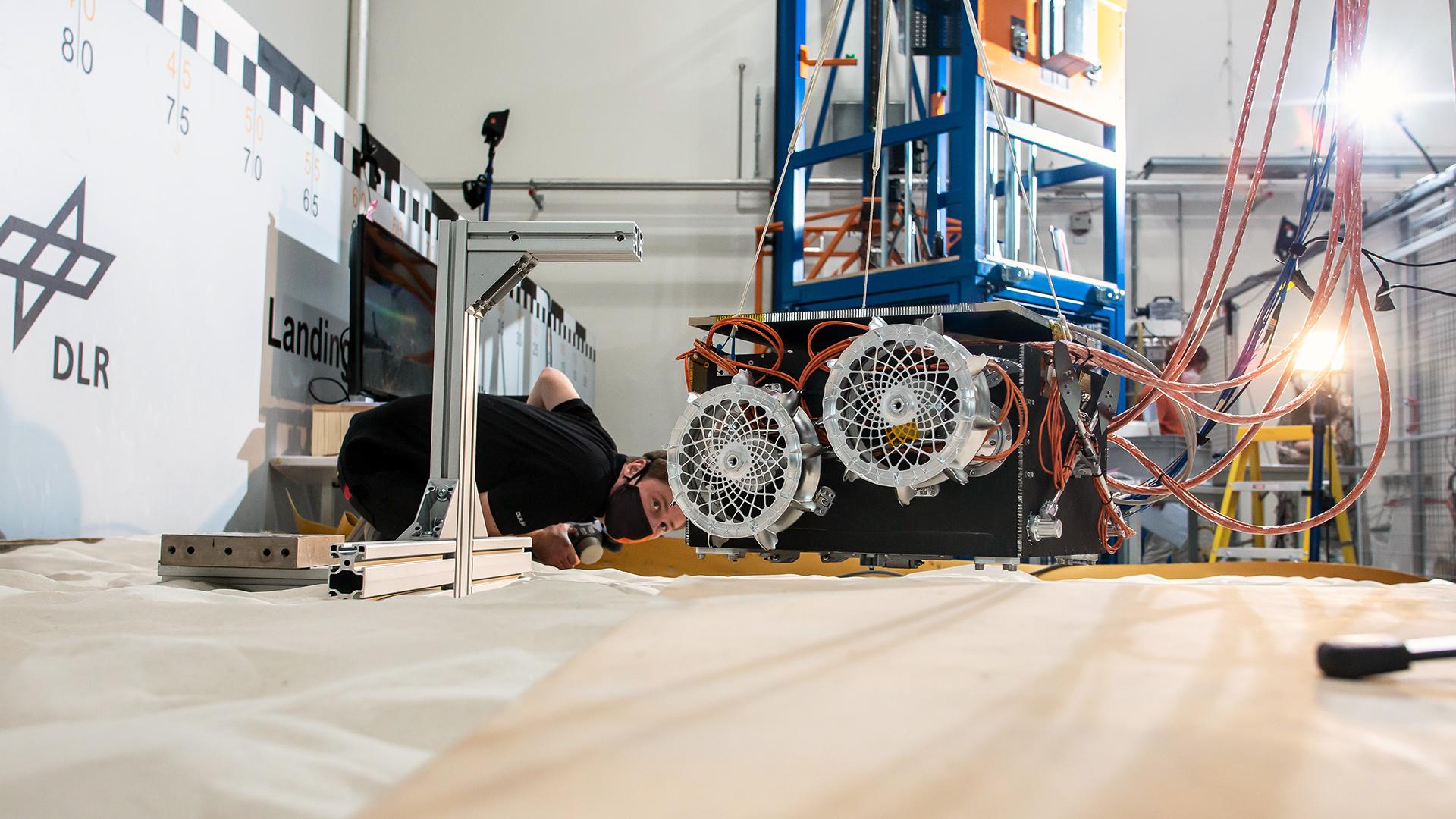
Vorbereitung eines Abwurfversuchs
Bei den aktuellen Versuchen lassen die Forschenden das vorläufige Modell des MMX-Rovers unter Laborbedingungen aus fünf Zentimetern Höhe auf einen wechselnden Untergrund in verschiedenen Winkeln fallen, um dessen Robustheit zu testen.
Für die Wiedergabe dieses Videos auf Quickchannel.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
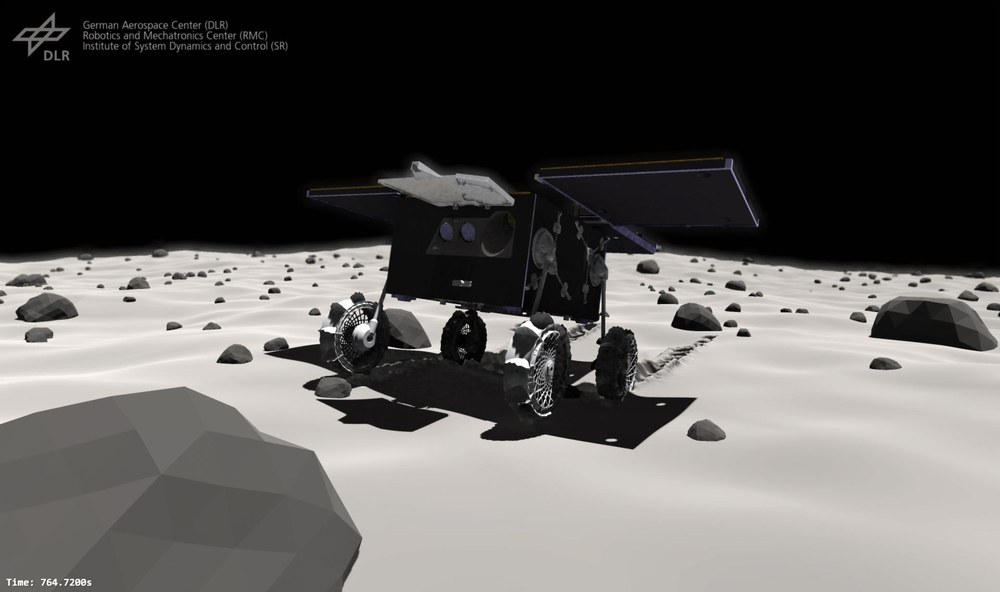
Landung des MMX-Rovers in der Simulation
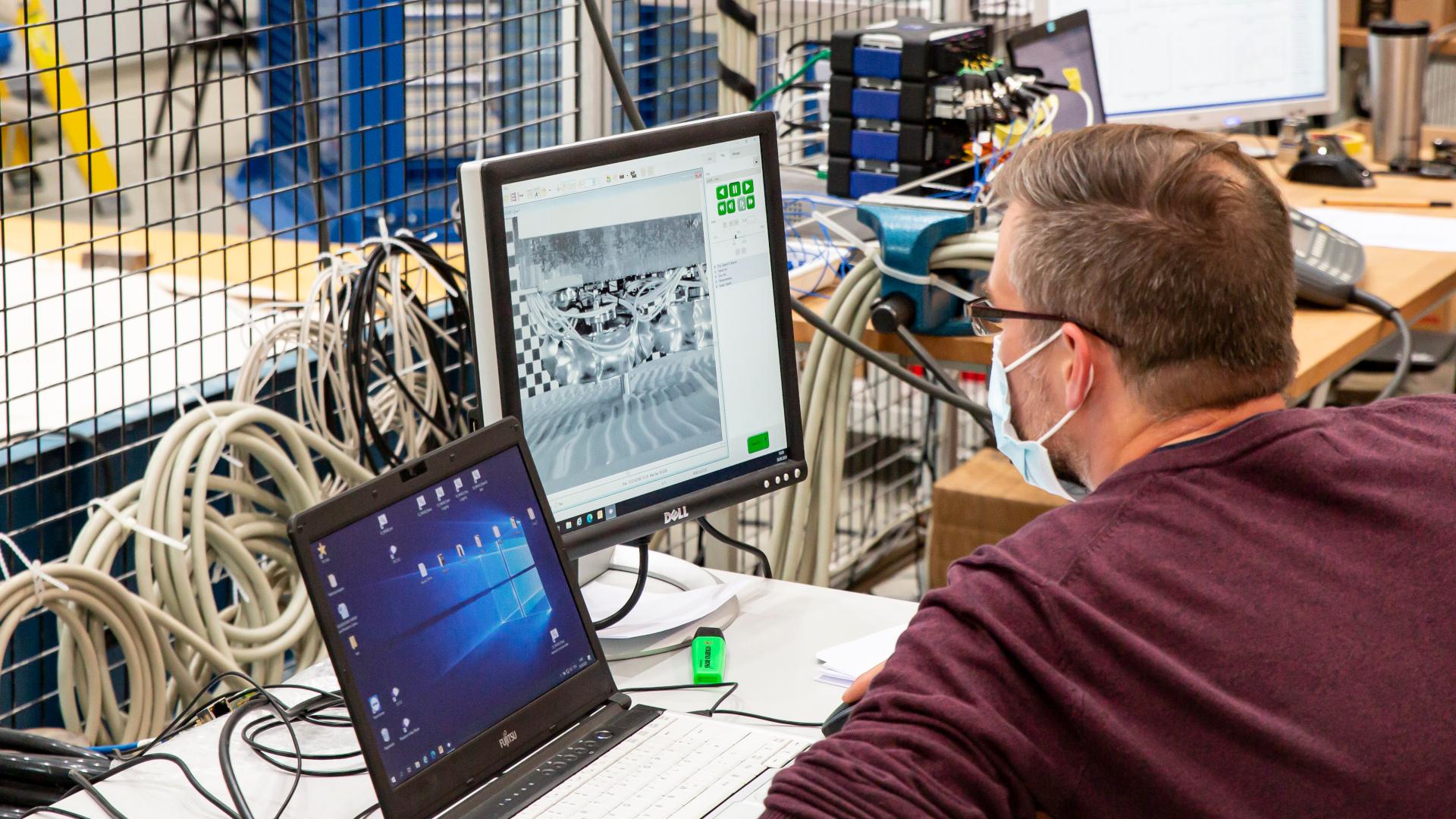
Zur Analyse, wie sich der MMX-Rover auf Phobos unter den Bedingungen der reduzierten Schwerkraft verhalten wird, führt das DLR-Institut für Systemdynamik und Regelungstechnik komplexe Simulationen durch. Die hier im Video dargestellte Simulation zeigt die besonders herausfordernde Missions-Phase der letzten Momente der Landung mit folgendem Aufrichten und Entfalten der Solarpaneele sowie der Ausrichtung zur Sonne. Nach dieser vollständig autonom erfolgten Sequenz ist der MMX-Rover in der Lage, seine Batterie für die erste Fahrt auf Phobos optimal aufzuladen. Im Projekt werden Simulationen wie diese eingesetzt, um wichtige Erkenntnisse für die weitere Entwicklung des Rovers zu generieren.
Die Mission Martian Moons eXploration (MMX) der japanischen Raumfahrtagentur JAXA wird bei ihrem Start 2024 einen deutsch-französischen Rover mitführen, der auf dem Marsmond Phobos landen und die Oberfläche für rund drei Monate erkunden wird. Derzeit laufen in der Lande- und Mobilitätstestanlage (LAMA) des Deutschen Zentrums für Luft- und Raumfahrt (DLR) in Bremen erste Tests zur Landung. Anhand eines ersten vorläufigen Entwicklungsmodells prüfen die Ingenieurinnen und Ingenieure wie robust der etwa 25 Kilogramm leichte Rover ausgelegt werden muss, um den Aufprall auf der Mondoberfläche nach etwa 40 bis 100 Meter freiem Fall gut zu meistern.
"Wir lassen das vorläufige Modell des MMX-Rovers unter Laborbedingungen aus fünf Zentimetern Höhe auf einen wechselnden Untergrund in verschiedenen Winkeln fallen", erklärt Versuchsleiter Michael Lange vom DLR-Institut für Faserverbundleichtbau und Adaptronik. "Da der Marsmond Phobos wegen seiner geringen Schwerkraft an der Oberfläche nur etwa ein Zweitausendstel der Erdfallbeschleunigung aufweist, können wir so die Intensität des Aufpralls für die Rover-Struktur simulieren." Eine besondere Herausforderung ist, dass der frei fallende Rover mit einer beliebigen Orientierung auf die Oberfläche trifft und dabei möglicherweise direkt auf einen Stein prallt. "Um diese Situation nachzustellen, verwenden wir zusätzlich zu einer ebenen Platte zwei Halbkugeln mit zwei und neun Zentimetern Durchmesser, die in einem Sandbett stehen", sagt Michael Wrasmann vom DLR-Institut für Raumfahrtsysteme. "Der genaue Landepunkt unterliegt dem Zufall und wir bereiten uns mit dieser Analyse auf die verschiedenen Szenarien vor."
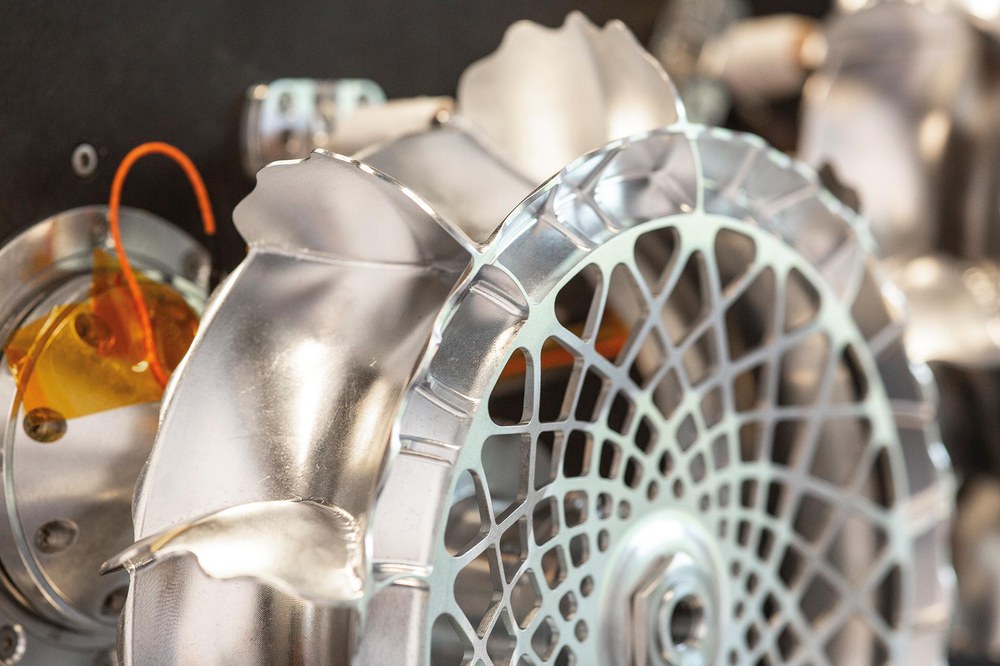
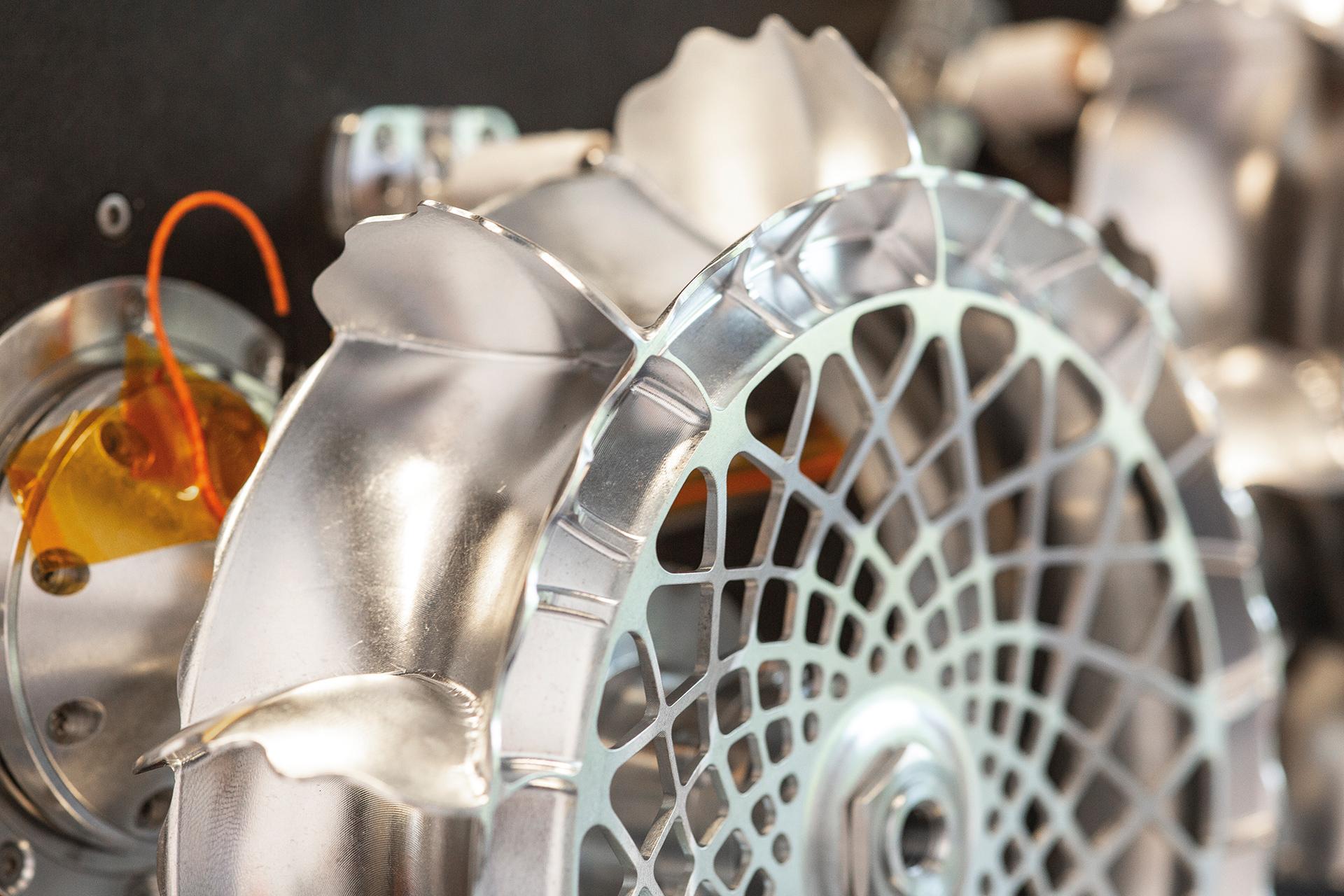
Das vorläufige Testmodell im Labor ähnelt dabei bereits mit zwei montierten Rädern sowie zwei Rad-Dummies (inklusive eines mechanischen Sicherungssystem für Start und Landung) dem späteren MMX-Rover, um potentielle strukturelle Schwachstellen aufzudecken und zu verbessern. Das 47,5 cm x 55 cm x 27,5 cm messende Gehäuse des Rovers ist dabei eine Leichtbaukonstruktion aus gezielt versteiften Sandwichbauteilen mit Deckschichten aus kohlenstofffaserverstärktem Kunststoff (CFK) und einem Aluminium-Wabenkern. Ergänzend zu den Laborversuchen werden auch umfangreiche Simulationen im Computer durchgeführt, die die Ergebnisse der Versuchsreihe um eine Vielzahl weiterer Landesituationen erweitern. Um die Genauigkeit des mechanischen Berechnungsmodells zu verbessern, finden zudem im Rahmen der Versuchsreihe Tests zum Schwingungsverhalten der Rover-Struktur statt. Die Erkenntnisse der Versuche helfen den Forscherinnen und Forschern nachfolgend das Design des MMX-Rovers detaillierter festzulegen. "Für 2021 ist die Erprobung eines dann bereits deutlich detaillierteren Strukturmodells mit allen Elementen des Bewegungssystems geplant. Dieses besteht aus den vier, an beweglichen Beinen angebrachten Rädern und einem am Heck des Rovers befindlichen Klapp-Mechanismus. Dieser Mechanismus bringt den Rover bei seitlicher Landung in eine Position, die es ihm ermöglicht mit Hilfe seiner Beine autonom in die letztendliche Fahrposition zu kommen und seine Solarpanele zu entfalten", erklärt der DLR-seitige Gesamtprojektleiter für den MMX-Rover Markus Grebenstein vom DLR-Institut für Robotik und Mechatronik in Oberpfaffenhofen.
Zusätzlich zu den strukturellen Belastungen durch die Landung ist der Rover extremen Strapazen durch die Umgebungsbedingungen ausgesetzt. So erwärmt sich Phobos innerhalb seines nur sieben Stunden dauernden Tages von -150 Grad Celsius auf +50 Grad Celsius. Das Innere des Rovers muss hierbei aktiv auf einer vergleichsweise konstanten Temperatur gehalten werden um die Qualität der wissenschaftlichen Messungen zu gewährleisten. "Deshalb werden 2021 ebenfalls ausgiebige Tests des Temperaturverhaltens des Rovers anhand eines Thermalmodells erfolgen", so Grebenstein weiter.
Der Start der JAXA-Mission Martian Moons eXploration (MMX) ist für 2024 geplant, der Eintritt in den Marsorbit für 2025. Ziel der Mission ist es die beiden Marsmonde Phobos und Deimos zu untersuchen und dabei zu klären, ob sie als eingefangene Asteroiden den Roten Planeten umkreisen, oder sich aber bildeten, nach dem ein größerer Körper auf dem Mars eingeschlagen war und sich dabei ausgeworfenes Material zu neuen Körpern zusammenfügte. Die Bildung des Systems Mars, Phobos und Deimos ist ein Schlüssel, um die Planetenbildung im Sonnensystem besser zu verstehen. Die Landung des MMX-Rovers ist als Teil der Mission für Ende 2026 oder Anfang 2027 geplant. Dieser wird rund 100 Tage detailliert die Oberflächenbeschaffenheit des Marsmondes analysieren und damit zur Lösung des wissenschaftlichen Rätsels seiner Entstehung beitragen.
Wenn @JAXA_jp 2024 die Mission "Martian Moons eXploration" (MMX) startet, ist auch ein deutsch-französischer Rover an Bord. Er soll auf dem Marsmond Phobos landen (Simulation im Video) & die Oberfläche für rund drei Monate erkunden. 🧐 Mehr Infos: https://t.co/8IAEBhe6OW@CNESpic.twitter.com/aUomV50E3o
Der deutsch-französische MMX-Rover wird unter gemeinsamer Leitung des DLR und der französischen Raumfahrtagentur CNES (Centre National d’Études Spatiales) entworfen und gebaut. Das DLR übernimmt dabei insbesondere die Entwicklung der Roboter Struktur, des gesamten Aufricht- und Fortbewegungssystems, sowie eines Raman-Spektrometers und eines Radiometers, die die Oberflächenzusammensetzung und -beschaffenheit messen werden. CNES leistet wesentliche Beiträge mit Kamerasystemen zur räumlichen Orientierung und Erkundung auf der Oberfläche sowie zur Untersuchung der mechanischen Bodeneigenschaften. Darüber hinaus entwickelt CNES das zentrale Service-Modul des Rovers inklusive des Onboard-Computers sowie des Energie- und Kommunikationssystems. Nach dem Start wird der Rover dann von Kontrollzentren des DLR und der CNES betrieben.
Die Mission MMX steht in der Tradition einer bereits langjährigen erfolgreichen Kooperation der Partner JAXA, CNES und DLR. Sie knüpft an die Vorgängermission Hayabusa2 an, bei der die JAXA eine Raumsonde zum Asteroiden Ryugu schickte mit dem deutsch-französischen Lander MASCOT an Bord. Am 3. Oktober 2018 landete MASCOT auf Ryugu und sendete spektakuläre Bilder einer Landschaft mit viel Geröll, Steinen und fast ohne Staub zur Erde, den Wissenschaftler eigentlich auf Ryugu erwartet hatten. Hayabusa2 nahm Proben von Ryugu und fliegt derzeit zurück zur Erde. Die Proben des Asteroiden sollen in einer Kapsel am 6. Dezember 2020 in Australien landen und anschließend im Labor untersucht werden.

{kind=link}
{kind=link}
{kind=link}