DLR-Roboter Rollin’ Justin bei einer Interaktion mit seiner Umgebung

DLR-Roboter Rollin’ Justin bei einer Interaktion mit seiner Umgebung
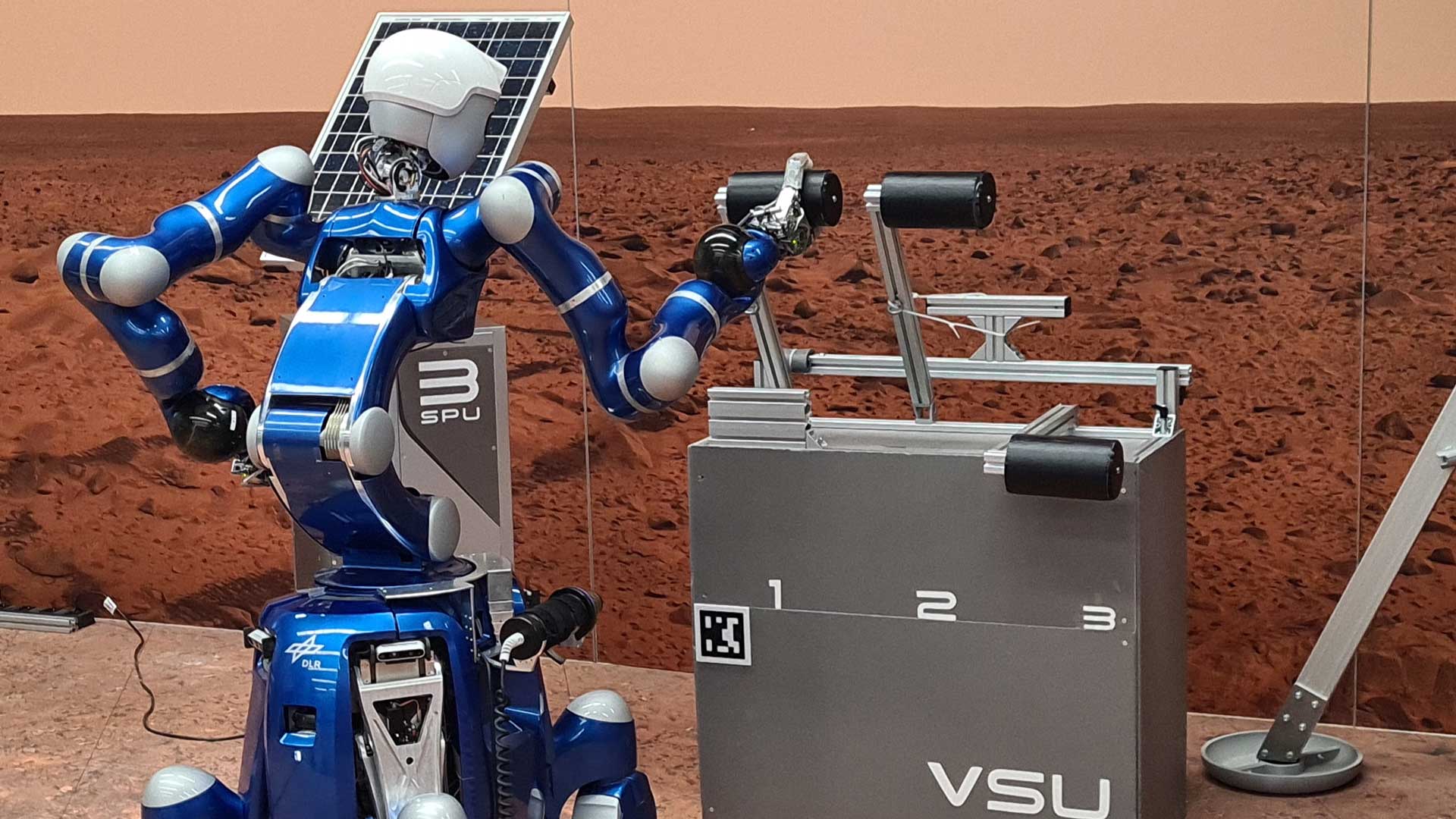
Der humanoide Roboter Rollin’ Justin interagiert mit einem sogenannten artikulierten Objekt mit spezifischer Kinematik. Der Astronaut auf der ISS muss den Roboterarm lediglich nach oben kommandieren, während der Roboter sich nicht nur nach oben bewegt, sondern dank der erhöhten Nachgiebigkeit automatisch eine Kreisbewegung um das Gelenk des Objekts ausführt.