Künstlerische Darstellung des ATV-3-Ankopplungsmanövers an die ISS

Künstlerische Darstellung des ATV-3-Ankopplungsmanövers an die ISS
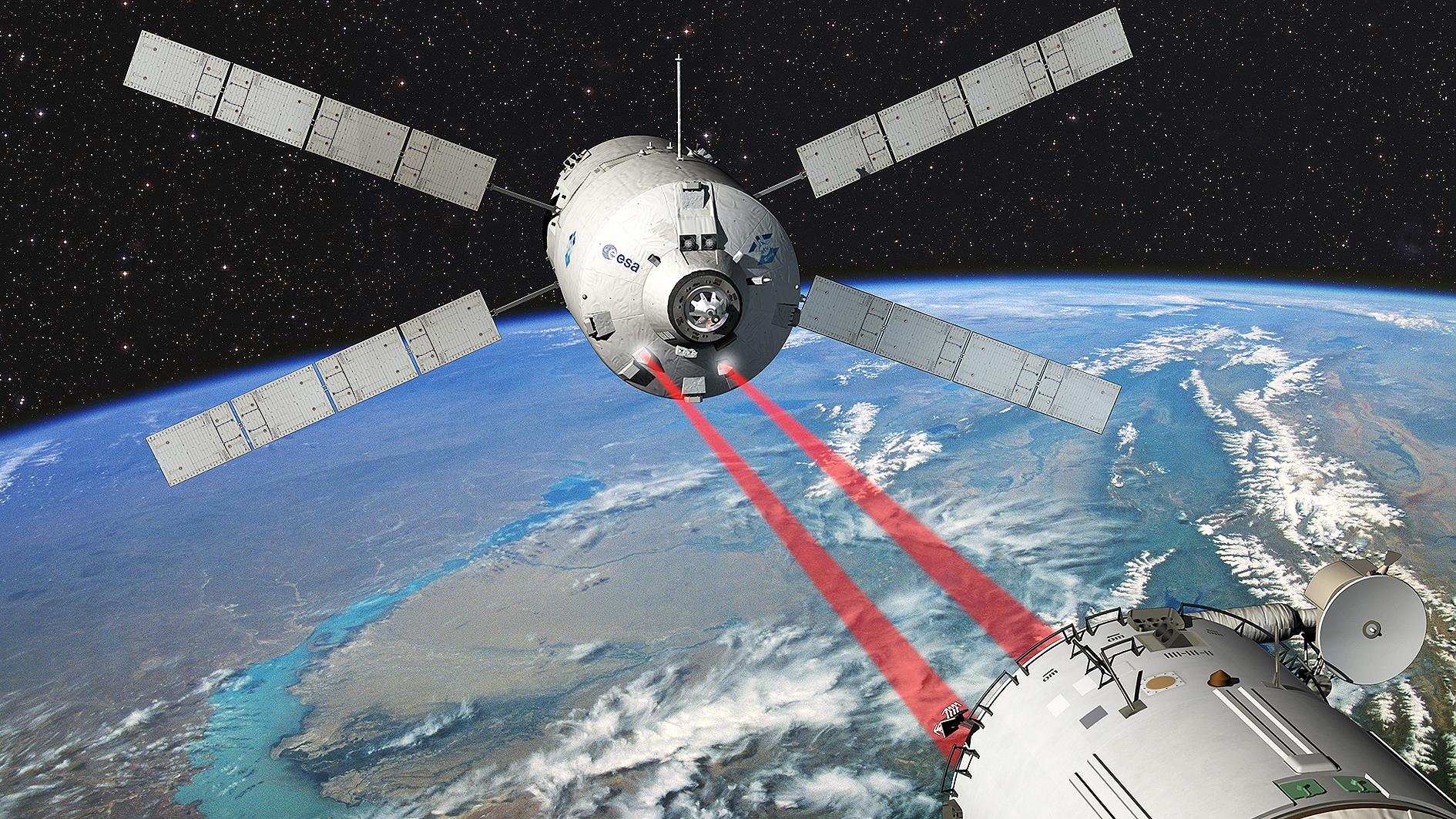
Künstlerische Darstellung der Annäherung von ATV-3 "Edoardo Amaldi" an das Swesda-Modul der Internationalen Raumstation ISS. Unterstützt wurde der Raumtransporter von einer Funk-Verbindung zum russischen Modul, dem sogenannten Proxy-Link, und dem relativen GPS. Hierbei werden die über das satellitengestützte globale Navigationssystem gewonnenen Positionsdaten von ISS und ATV vom ATV-Bordrechner ausgewertet und verglichen. Sie dienen zur Feinjustierung der ATV-3 Position. Das russische KURS-Radar unterstützt die Navigation ab einer Entfernung von etwa 3,5 Kilometern. Auf den letzten 250 Metern zur ISS sendet ein Lasersystem Impulse an die Reflektoren des Swesda-Moduls und berechnet die Lage anhand der reflektierten Signale. Auf den letzten 50 Metern navigierte ATV-3 schließlich noch mit einem Videosystem. Insgesamt dauerte das Manöver dreieinhalb Stunden.