Das Projektpatch zeigt CALLISTO stilisiert vor der Küste von Kourou in französisch Guyana. Unten links erkennt man den Kourou Fluss und unten rechts die Inseln des Heils (Iles du Salut). Dargestellt wird auch die Bahn, die CALLISTO fliegen soll, mit farbigen Änderungen, die vom Zustand des Triebwerksbetriebs abhängig sind und die Logos der drei Partner, JAXA (japanische Raumfahrtagentur), CNES (französische Raumfahrtagentur) und DLR. Das Recyclingsymbol im Rahmen weist auf die Wiederverwendbarkeit von CALLISTO hin.
Um die Wettbewerbsfähigkeit der europäischen Raumfahrtindustrie sicherzustellen, ist es wichtig, die Kosten für den Transport von Nutzlasten ins All zu senken. Eine wichtige Rolle spielt dabei die Wiederverwendbarkeit von Raketenstufen. Das Gemeinschaftsprojekt der Japanischen Raumfahrtagentur JAXA, der französischen Raumfahrtagentur CNES und des DLR – CALLISTO (Cooperative Action Leading to Launcher Innovation in Stage Toss back Operations) setzt hier an. Der Demonstrator, wie viele Raumfahrtprojekte benannt nach einer Figur aus der altgriechischen Mythologie, zielt im Kern darauf ab, die Kenntnisse über vertikal startende und vertikal landende Raketenstufen (VTVL – Vertical takeoff, vertical landing) zu verbessern. Fähigkeiten und Technologien für eine wiederverwendbare Raketenstufe sollen durch CALLISTO entwickelt und demonstriert werden.
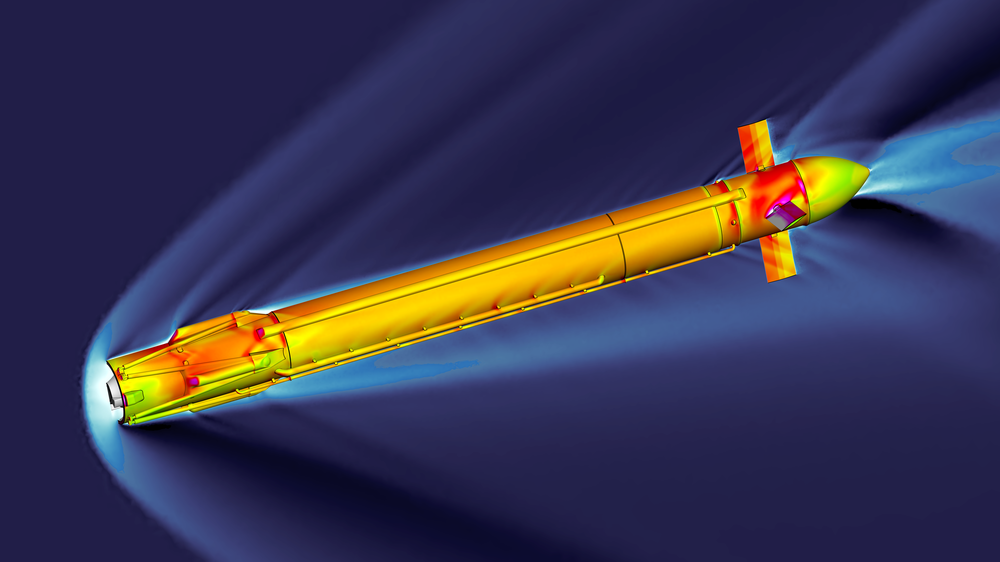
Der Demonstrator ist dreizehn Meter hoch und mit ausklappbaren aerodynamischen Steuerflächen sowie ausklappbaren Landebeinen ausgestattet. Angetrieben wird das Raumfahrzeug von einem einzigen Raketentriebwerk, die eine Mischung aus flüssigem Sauerstoff (LOx) und Wasserstoff (LH2) als Brennstoff nutzt. Die Abläufe rund um den Start sind bei CALLISTO automatisiert – Zündung, Einschuss in die vordefinierte Flugbahn, Abschalten und Wiederzündung des Triebwerks, Ausfahren des aerodynamischen Flugsteuerungssystems (Finnen). Für die Flugphase entwickelt das DLR zusammen mit JAXA Algorithmen, die es erlauben, die Bahn während des Fluges zu optimieren.
Mit CALLISTO entwickeln DLR-Ingenieure in Zusammenarbeit mit der französischen Raumfahrtagentur CNES und der japanischen Raumfahrtagentur JAXA einen Demonstrator, der senkrecht starten und in der gleichen Ausrichtung landen kann (Vertical Take-off, Vertical Landing (VTLT)). CALLISTO wird mit Hilfe aerodynamischer Steuerflächen in der Rückkehrphase ohne Triebwerk gesteuert. Anschließend wird das Triebwerk wieder gezündet, um CALLISTO abzubremsen. Das Landesystem absorbiert die verbleibende kinetische Energie, so dass CALLISTO eine sichere und stabile Landung durchführen kann.
Video: CALLISTO (engl.)
Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
Video: CALLISTO (engl.)
Mit CALLISTO entwickeln DLR-Ingenieure in Zusammenarbeit mit der französischen Raumfahrtagentur CNES und der japanischen Raumfahrtagentur JAXA einen Demonstrator, der senkrecht starten und in der gleichen Ausrichtung landen kann (Vertical Take-off, Vertical Landing (VTLT)). CALLISTO wird mit Hilfe aerodynamischer Steuerflächen in der Rückkehrphase ohne Triebwerk gesteuert. Anschließend wird das Triebwerk wieder gezündet, um CALLISTO abzubremsen. Das Landesystem absorbiert die verbleibende kinetische Energie, so dass CALLISTO eine sichere und stabile Landung durchführen kann.
Warum benötigt man einen Demonstrator, wenn doch die Simulationsmethoden inzwischen sehr ausgefeilt sind? Mit Tests unter realen Bedingungen können die an CALLISTO beteiligten Fachleute sicherstellen, dass die am Computer errechneten Flugeigenschaften und -verhaltensweisen auch in Realität zutreffen. Darüber hinaus helfen die im Flugexperiment gewonnenen Daten bei der Weiterentwicklung von Simulationstools im Hinblick auf die Genauigkeit ihrer Prognosen. Das Zusammenspiel von numerischer Theorie und physikalischer Praxis ergibt letzten Endes das zuverlässige Gesamtbild. Die Projektbeteiligten erwarten darüber hinaus wichtige Erkenntnisse in punkto Wirtschaftlichkeit von wiederverwendbaren Stufen, weil auch die Prozesse am Boden – Herstellung, Transport, Wartung zwischen Flügen, Betrieb von Kontrollzentren – genau untersucht und mit der Planung verglichen werden. Insgesamt sollen bei CALLISTO durch Simulation und reale Erprobung eines Demonstrators Methoden und Modelle für wiederverwendbare Raketenstufen verifiziert, verbessert und optimiert werden.
Trilaterale Kooperation
CALLISTO Arbeitsverteilung in der trilateralen Kooperation
Das DLR ist für die Flugsoftware, den On-Board-Rechner, die Abdeckung der Raketenspitze, das Navigationssystem, den Flüssigwasserstofftank (LH2 Tank), das Annäherungs- und Landesystem sowie das Aerodynamik-Flugsteuerungssystem und die Avionikbucht (VEB: Vehicle Equipment Bay) zuständig. Zusammen mit der japanischen Raumfahrtagentur JAXA entwickelt das DLR die Algorithmen für Steuerung und Kontrolle. Die französische Raumfahrtagentur CNES liefert eine zweite Version der Flugsoftware und der Algorithmen für Steuerung und Kontrolle, den Flugdatenrecorder, das Bodensegment, das Heißgas-Reaktionskontrollsystem und das Telemetrie-System. JAXA steuert zudem folgende Subsysteme bei: die Heckladebucht, den Antrieb, den Flüssigsauerstofftank (LOx Tank), die Stromversorgung und die Schubvektorkontrolle.
Herausforderung Touchdown: CALLISTO landet vollkommen automatisch
Das Besondere an CALLISTO ist, dass auch der Landevorgang automatisch abläuft: Das Triebwerk zündet erneut, um die Fallgeschwindigkeit zu senken, die Landebeine klappen aus, das Landesystem absorbiert die verbleibende Bewegungsenergie, wodurch das Vehikel sicher und stabil aufrecht landen kann.
In der Animation oben sieht dies für Laien unspektakulär aus, doch bei hoher Fallgeschwindigkeit und einem Schub-Gewicht-Verhältnis von über 1,3 ist ein solcher „Touchdown“ alles andere als einfach zu realisieren. Es ist ungefähr so, als würde ein Autofahrer oder eine Autofahrerin versuchen, mit über 250 Kilometern pro Stunde (CALLISTO fällt mit über 800 Kilometer pro Stunde) auf eine Garage zuzufahren, um kurz vorher eine Vollbremsung hinzulegen, um in der Garage passend anzuhalten.
Mindestens fünf unterschiedliche Missionen sollen mit demselben Raumfahrzeug vom europäischen Startplatz Kourou in Französisch-Guayana durchgeführt werden. Dabei soll sich der Schwierigkeitsgrad bei jedem Test erhöhen. Während die ersten Flüge lediglich einige Meter vom Boden abheben, soll der finale Demonstrationsflug bis über zehn Kilometern Höhe erreichen und unter Bedingungen ablaufen, die es erlauben, Manöver durchzuführen, die für eine operationelle VTVL-Stufe relevant sind.
Projekt CALLISTO – Cooperative Action Leading to Launcher Innovation in Stage Toss back Operations
Projektphase A bis C Projektart: Grundfinanziert Fördermittelgeber: DLR-Programmdirektion Raumfahrt
Projektphase D bis F Projektart: Drittmittelfinanziert Fördermittelgeber: Deutsche Raumfahrtagentur im DLR mit Mitteln aus dem nationalen Raumfahrtprogramm













{kind=link}
{kind=link}
{kind=link}
{kind=link}