
Non-invasive Rehabilitation and Prosthetics (2010)


Upper-limb rehabilitation and prosthetics are paramount applications of the techniques developed in bionics. Since 2006 we focus upon non-invasive human-computer interfaces to aid the disabled regain the lost hand functionality without the stress of surgery, drugs, hospitalisation and so on. In our view, both rehab and prosthetics rely on re-establishing the sensori-motor loop with the missing limb. This includes both ways: feed-forward control by detecting the patient’s will to move and sensorial feedback by transducing digital readings to feelings.
In particular, we study the use of surface electromyography (sEMG) to detect the intention and force of movement of the patient, either amputated or left with lesser muscle funcionality, such as, e.g., hit by stroke or nerve-degenerative conditions. At the same time, we investigate innovative ways of delivering sensorial feedback such as, e.g., impedance-controlled mechatronic devices and the direct application of force to the stump.
1. THE FEED-FORWARD PATH. To interpret the patient’s (residual) muscle commands and translate them to a realistic feed-forward control signal for a hand proxy, either a mechanical hand or a graphic model:
• building a new generation of sEMG electrodes: more dense, more accurate, more flexible
• applying machine learning techniques to interpret the (residual) muscle signals and translate them to movement and force commands
• building and refining hand proxies, mechanical and/or virtual

2. THE FEED-BACK PATH. To send to the patient accurate, real-time signals which can be interpreted as sensorial feedback from hand proxy, associated to the actions delivered through the feed-forward path and integrated in a better sensori-motor loop:
• 1D force feedback through the application of force (patent pending)
• 3D force feedback using impedance-compliant robotic devices (patent pending)
3. GOING CLINICAL. To apply our findings to patients and check that they meet their needs and taste. To this end, we actively seek help from private patients as well as clinical institutions such as hospital and rehab clinics.
Non-invasive feed-forward real-time control of hand
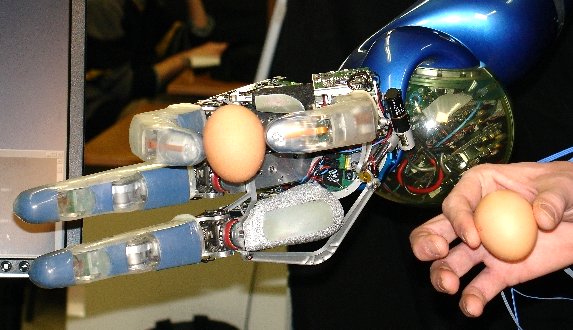
In a joint effort with the University of Genova, Italy and INAIL, Bologna, Italy, we showed that as few as five commercial sEMG electrodes suffice to enable lower-arm amputees feed-forward control a dexterous mechanical hand such as the DLR-II. A first implementation was realised in 2007 at the DLR (see clip egg.avi); in 2008 we then showed that the same techniques could enable amputees do the same. [1,2,3]
SEMG control of a robot hand for hand rehabilitation
In 2006, the DLR 4-finger hand was set up for functional hand recovery of subjects with partial loss of correct muscle control, resulting from, e.g, stroke, spinal cord injury or hand allograft. Standard rehab therapy relies on assisted movement of the defective limb with support by a specialized therapist (physiatrist), over days and possibly months. This involves time, money, specialised assistence and is hospital-based.
The system [4,5] is especially designated for patients who need to re-learn to control their fingers and re-develop spontaneous muscle control. sEMG (ten electrodes placed on the patient’s forearm) is used thru a support vector machine to classify the EMG patterns into hand gestures. The system is able to distinguish nine hand gestures; the coupling between the patient’s and the robotic hand is realized over flexible neoprene gloves. (see clip control.avi)
Bibliography
[1] C. Castellini and P. van der Smagt, Surface EMG in Advanced Hand Prosthetics, Biological Cybernetics 100(1) 2008.
[2] C. Castellini, E. Fiorilla and G. Sandini, Multi-subject / Daily-Life Activity EMG-based control of mechanical hands, Journal of Neuroengineering and Rehabilitation 6:41, 2009.
[3] C. Castellini, E. Gruppioni, A. Davalli and G. Sandini, Fine detection of grasp force and posture by amputees via surface electromyography, Journal of Physiology (Paris) 103(3-5), 2009.
[4] S. Maier P. van der Smagt, Surface EMG suffices to classify the motion of each finger independently. In: Proceedings of MOVIC 2008, 9th International Conference on Motion and Vibration Control, 2008.
[5] S. Bitzer and P. van der Smagt, Learning EMG control of a robotic hand: Towards Active Prostheses. In: Proceedings of the ICRA-2006 IEEE International Conference on Robotics and Automation, 2006.