

Terrain and city modeling from aerial images
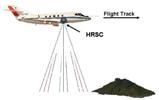
Aerial images can be acquired relative quickly and with ground resolutions of down to a few cm per pixel. Usually, cameras are pre-calibrated and the position and orientation at each imaging position is measured during the flight by differential GPS and IMU sensors. For several applications, it is useful or required to reconstruct the scene and integrate all individual images into one consistent, large image.
