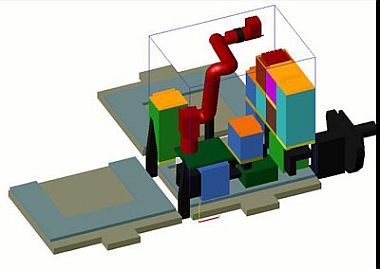
In den Jahren 1998 und 1999 entwickelten das Institut und sein italienischer Industriepartner CARLO GAVAZZI Subsysteme für das ESA-Projekt EUTEF (EUropean Technology Exposure Facility). Es wurden detaillierte Konzepte für die Anbringung von Paletten an der Außenstruktur der ISS (entweder an der langen Gitterstruktur oder am europäischen COF-Modul) ausgearbeitet, wo ein Roboterarm die operative Handhabung der Nutzlast übernehmen sollte, d.h. das Greifen von Nutzlastboxen und Schubladen, das Einsetzen in Messgeräte oder das gezielte Aussetzen der Nutzlast gegenüber der Weltraumstrahlung und -beleuchtung (Sterne, Sonne, etc.).
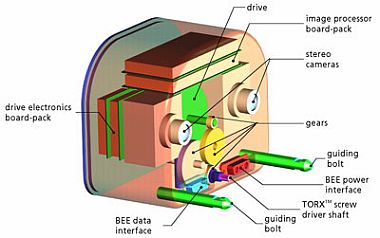
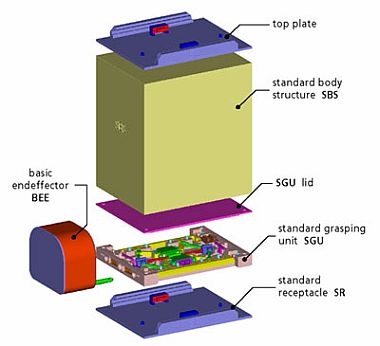
Wir haben einen kraftgesteuerten intelligenten Endeffektor als Schlüsselelement eines solchen Systems entwickelt, das die lokale Stereovision und ihr Gegenstück, den exakt passenden Schließ- und Greifmechanismus in den Boxen und Schubladen, einbezieht. Dem Konzept des virtuellen Designs folgend wurden diese Komponenten nicht nur in 3D-CAD-Systemen konstruiert, sondern in all ihren kinematisch-dynamischen Interaktionen realistisch simuliert, so dass sie ohne iterative Prototypenentwicklung aufgebaut werden konnten. Das Hauptaugenmerk lag darauf, dass der Roboter, sobald er ein Objekt ergriffen hat, keine Möglichkeit haben sollte, es versehentlich loszulassen (z.B. durch Programmierfehler oder eine Fehlfunktion der Elektronik), bis er es an einer anderen Position sicher befestigt und arretiert hat.
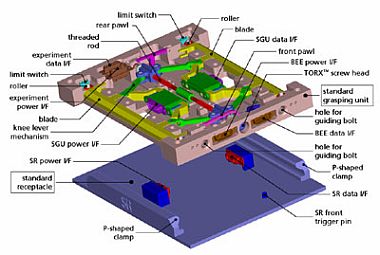
Die Abbildung oben zeigt den Verriegelungsmechanismus im Detail. Die Klingen werden über einen spindelgetriebenen Kniehebel-Mechanismus mit hoher Kraft betätigt, wobei zwei elektrische Stecker fest mit den Klingen verbunden sind. Während der Manipulation der Nutzlast sorgt der Endeffektor für die Stromversorgung und die Datenverbindung. Wann immer der Roboter versucht, ein Objekt zu greifen, sollten die Stereokameras und einfache visuelle Muster auf den Boxen die genaue 6-dimensionale Feinpositionierung garantieren, bevor die Führungsbolzen mit Hilfe eines Kraft-Drehmoment-Sensors und sensorgesteuerter Autonomie an Bord eingesetzt werden.
Leider musste das Projekt nach dem Prototypenstatus aufgrund von Konstruktionsproblemen mit COF und Mittelkürzungen gestoppt werden.