Assembly data
In this article we show the results obtained after the training phase of the system described in the paper "Pattern Recognition for Knowledge Transfer in Robotic Assembly Planning".
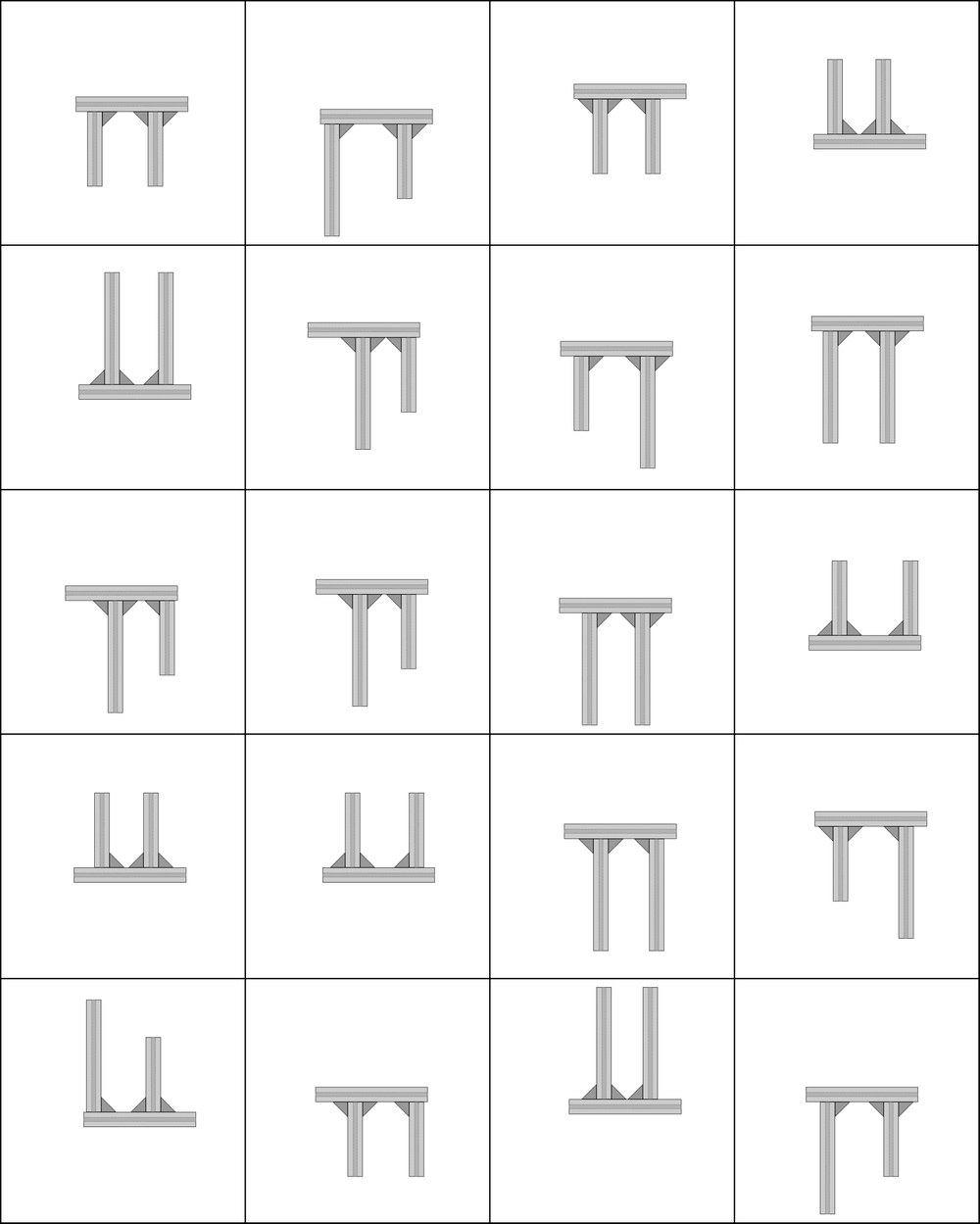
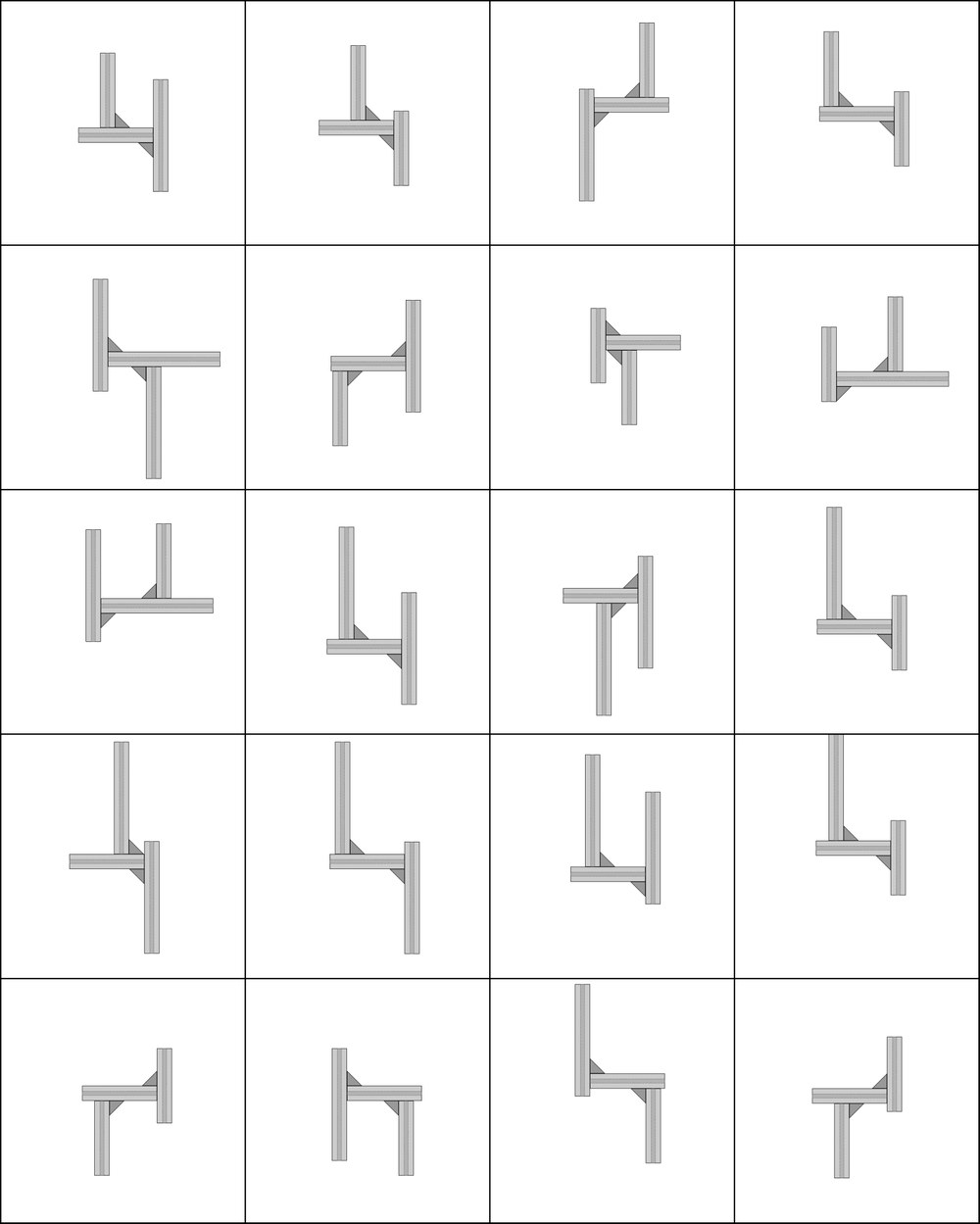
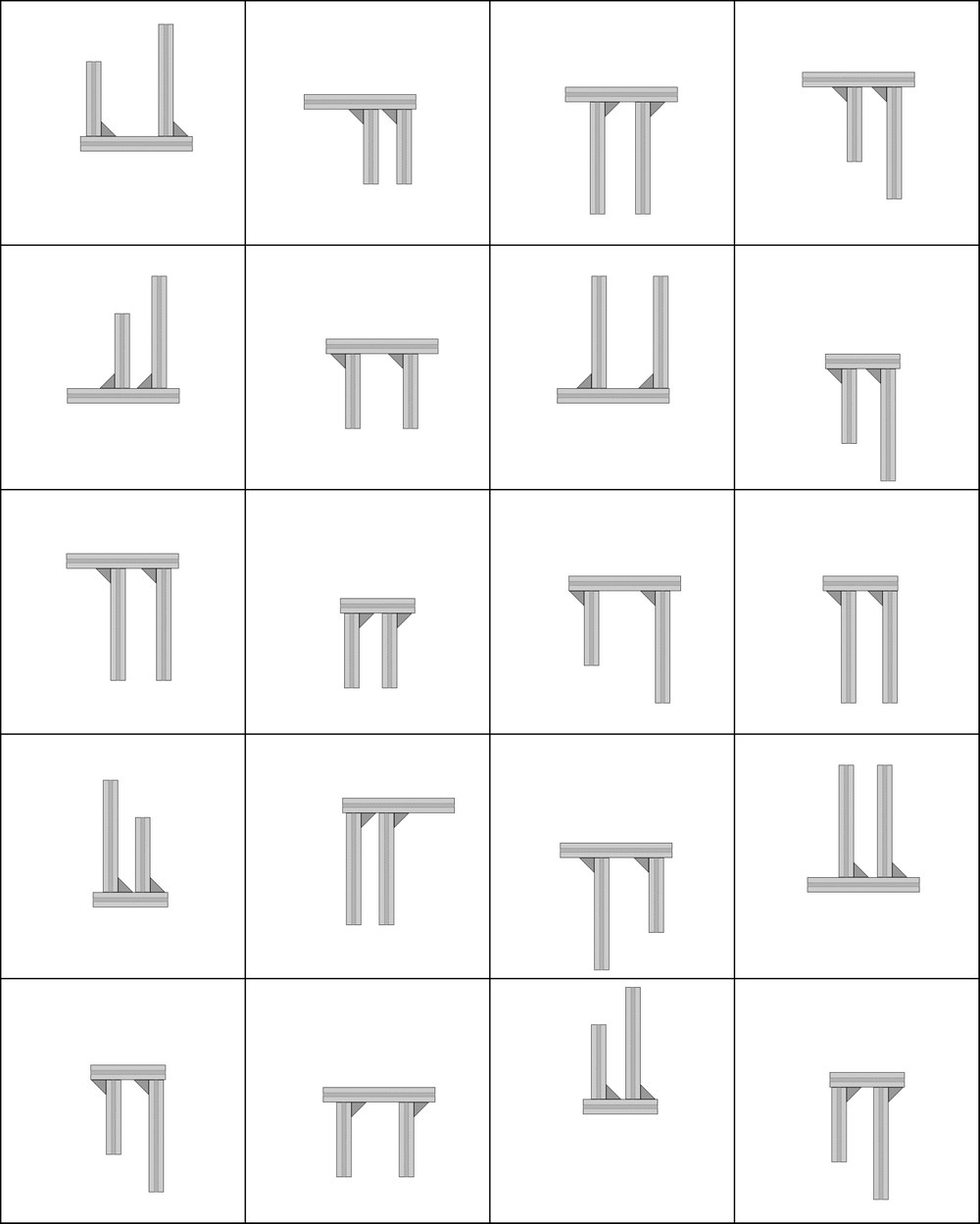
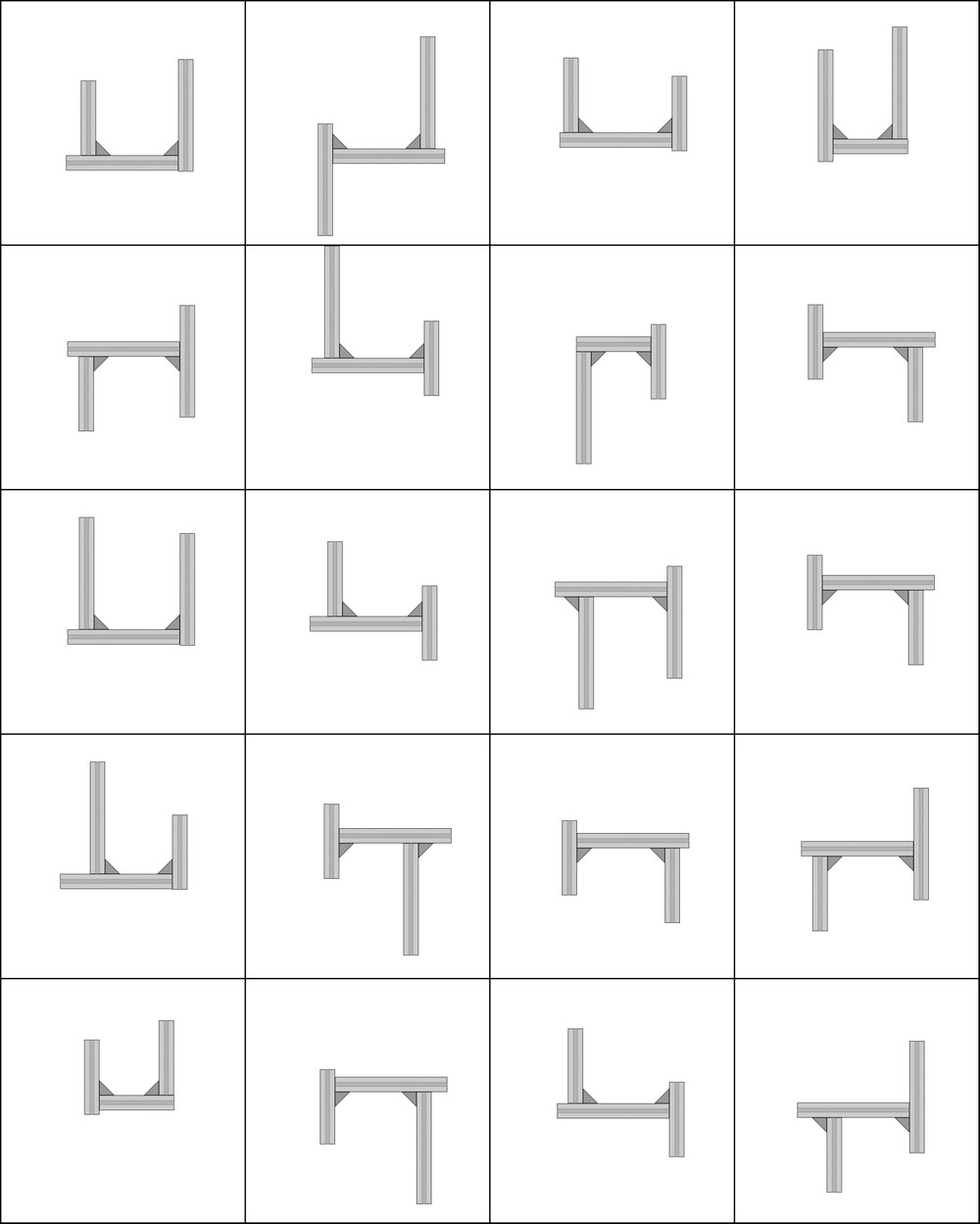
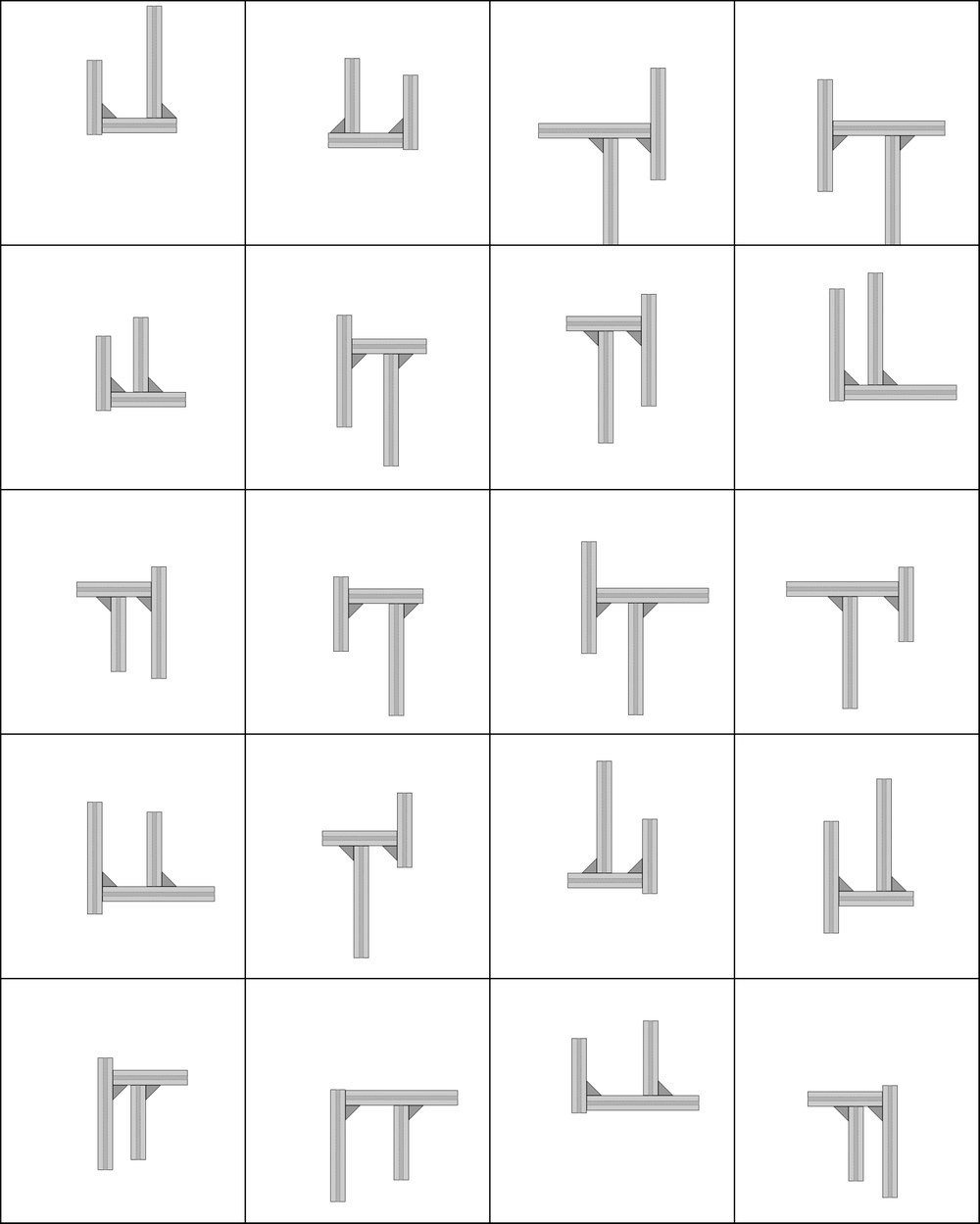
The results are separated by topologies, so all these assemblies have the same relation structure.
Inside of each topology we cluster the instances depending on the rule set correspondent to them. Here we show only a subset of all the instances generated from the 5000 assemblies (no more than 20 instances per cluster are shown).
Topology 1
Cluster 1
item_profile_300_1<item_profile_200_1
item_profile_200_1<item_profile_300_1
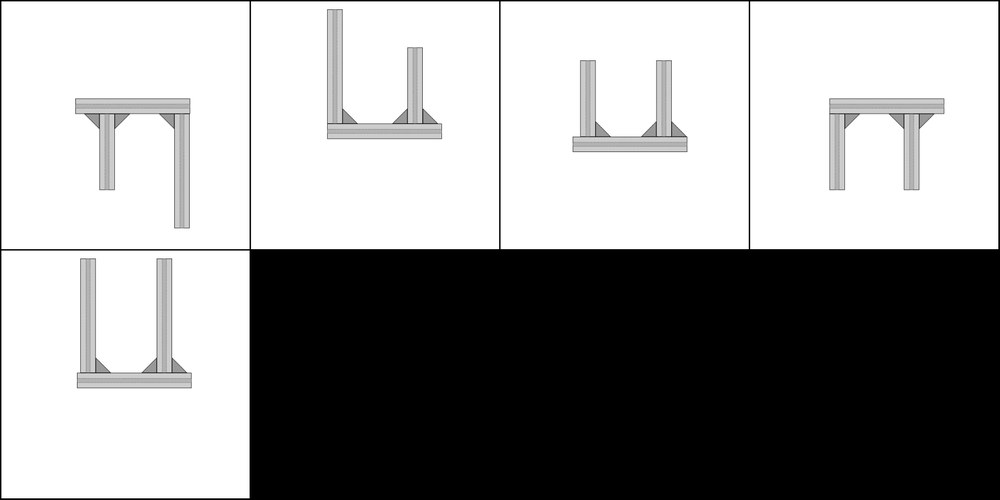
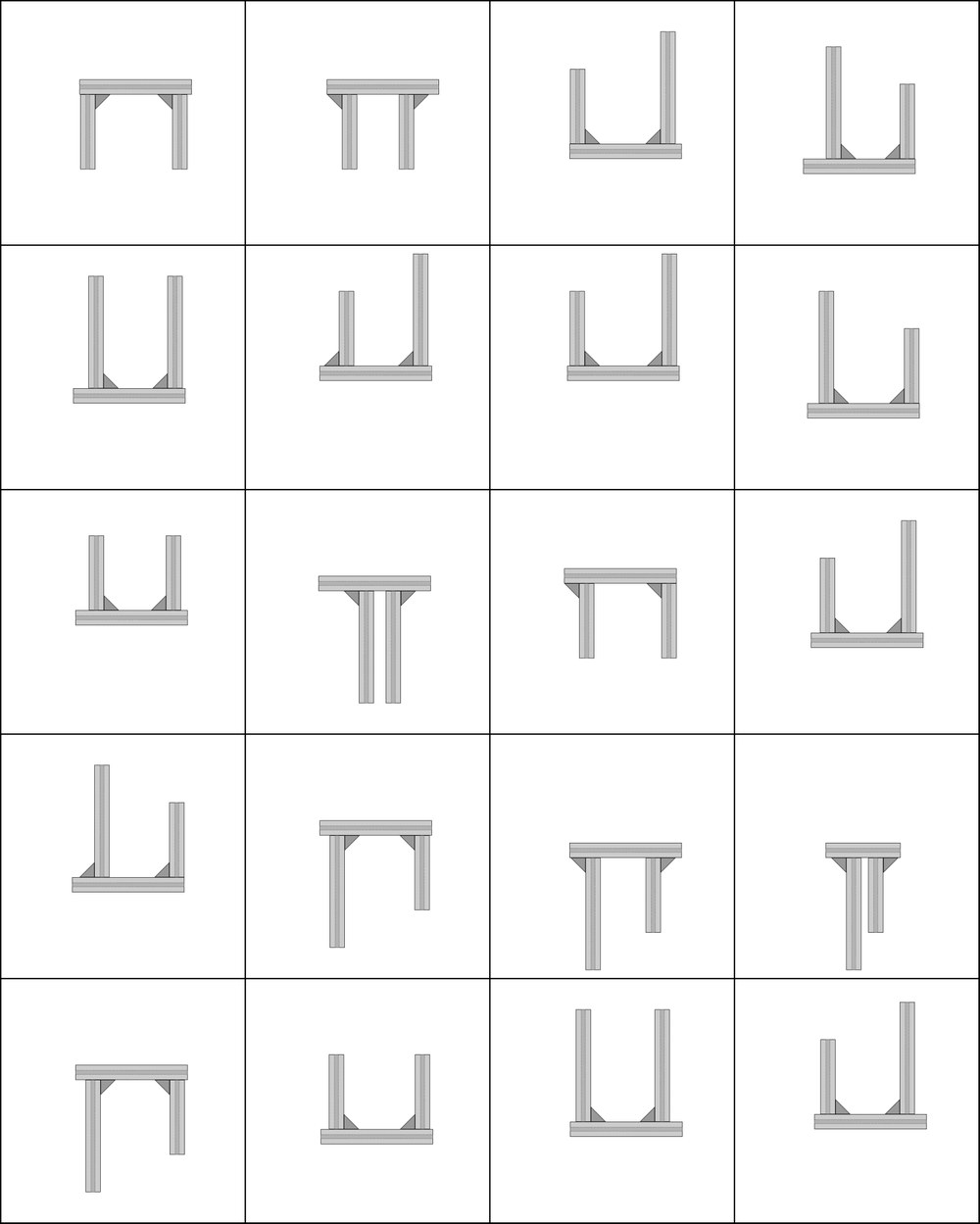
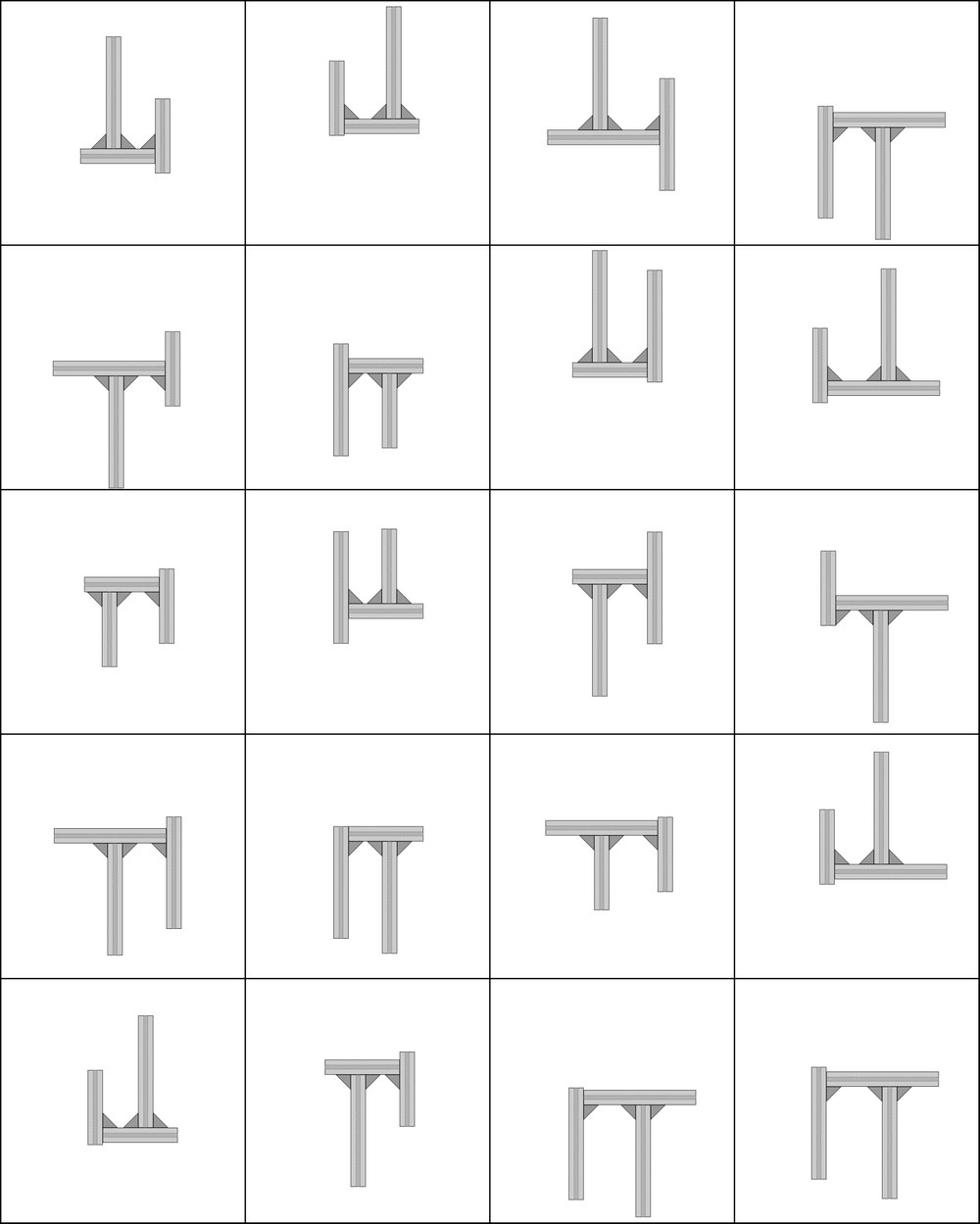
Cluster 2
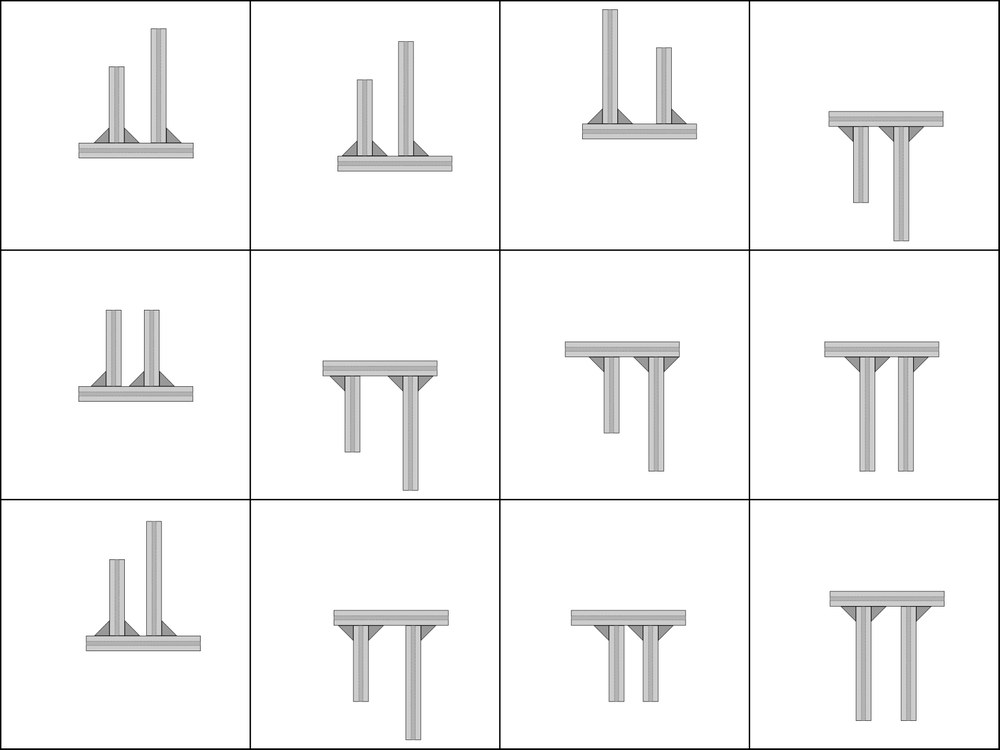
Cluster 3
item_profile_200_2<item_profile_300_1
item_profile_200_2<item_profile_200_1
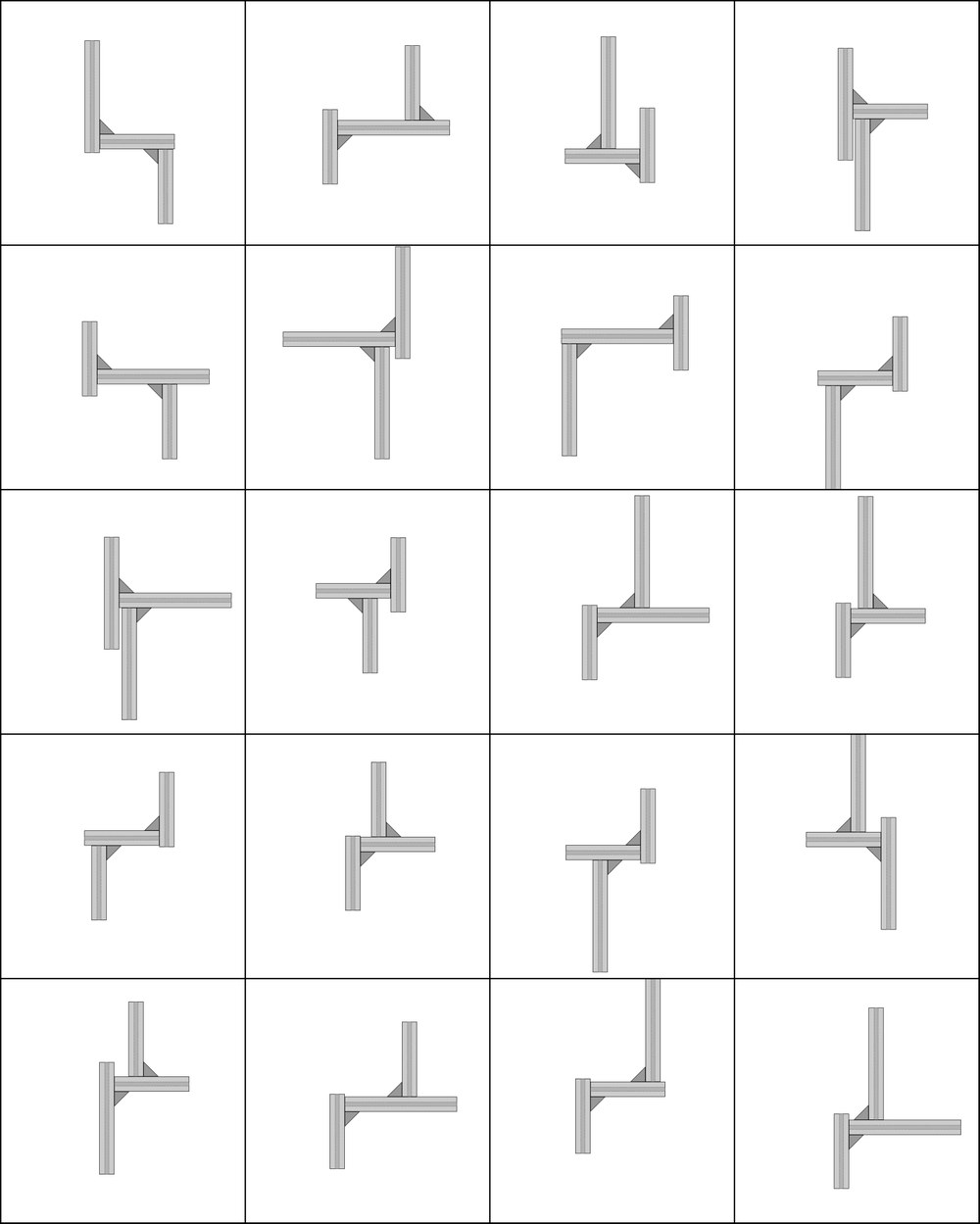
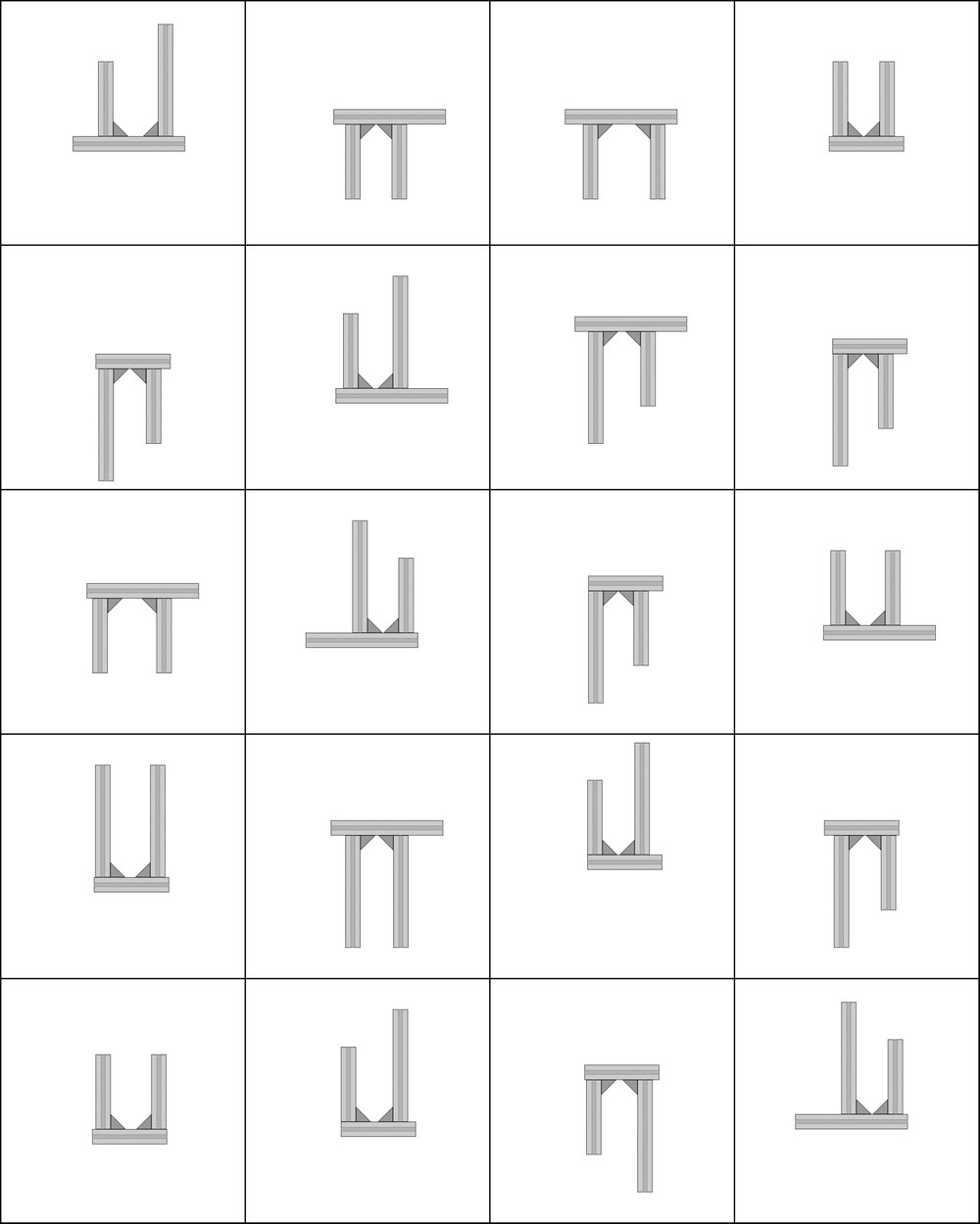
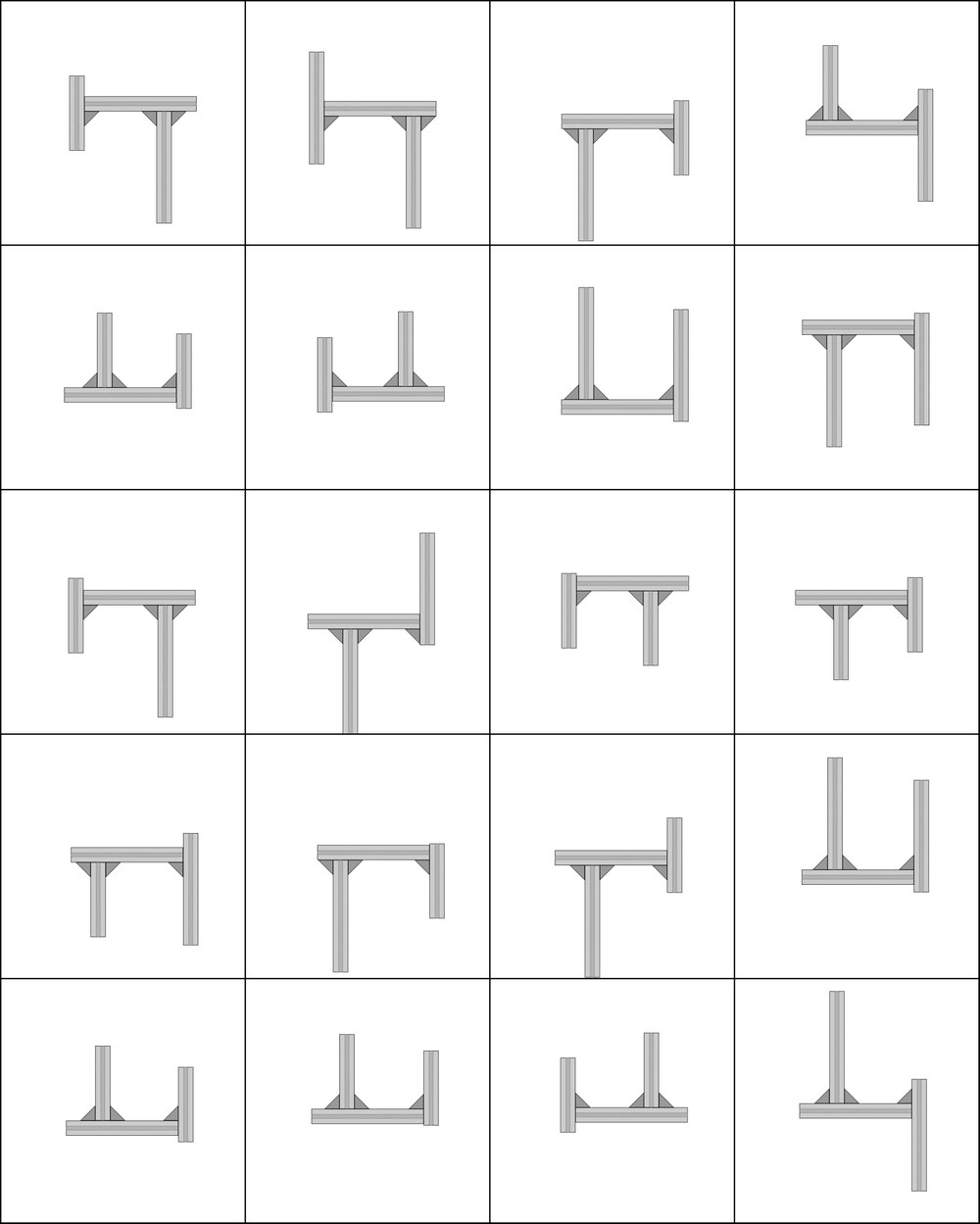
Topology 2
Cluster 1
Cluster 2
item_profile_300_2<item_profile_300_1
item_profile_300_2<item_profile_200_1
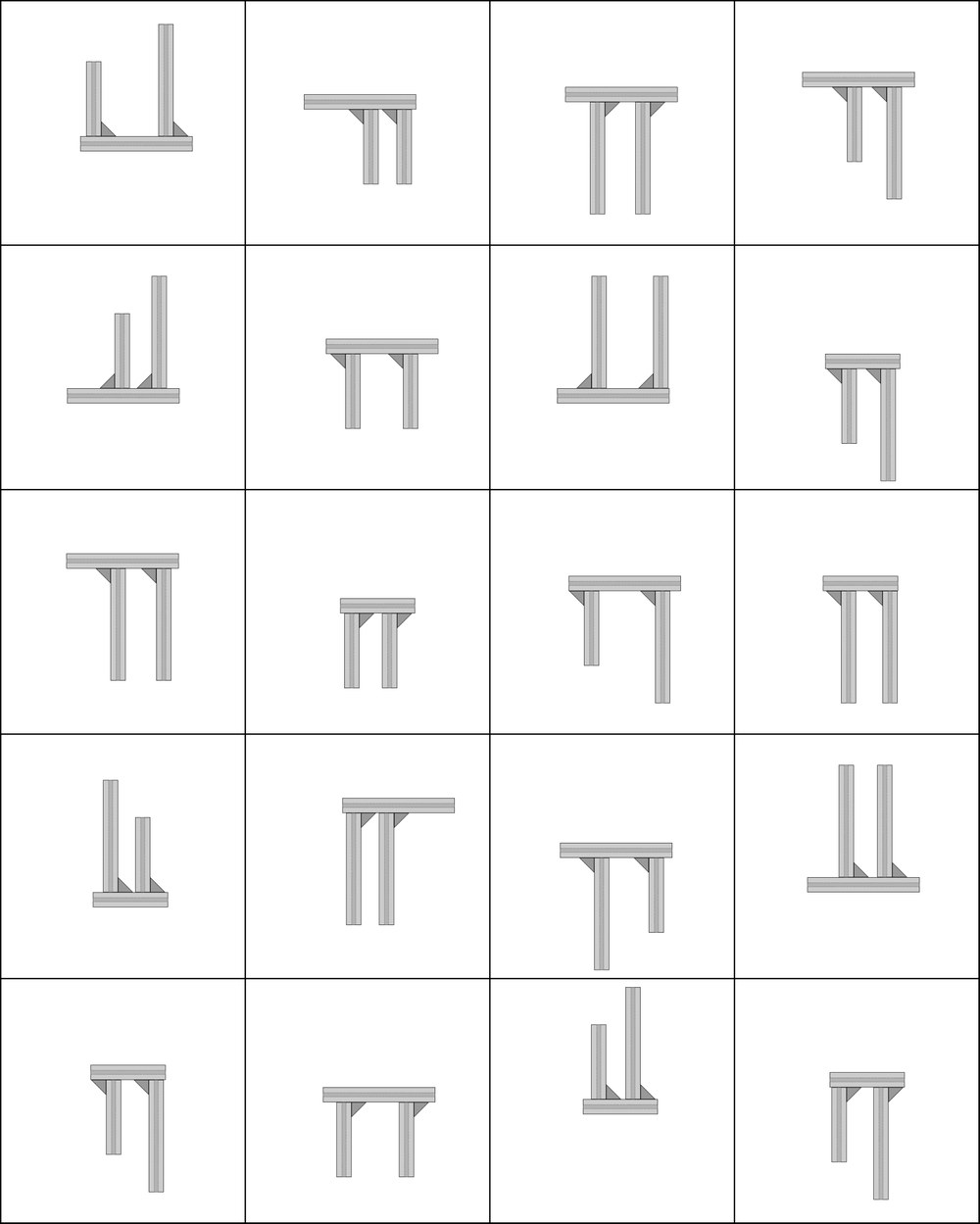
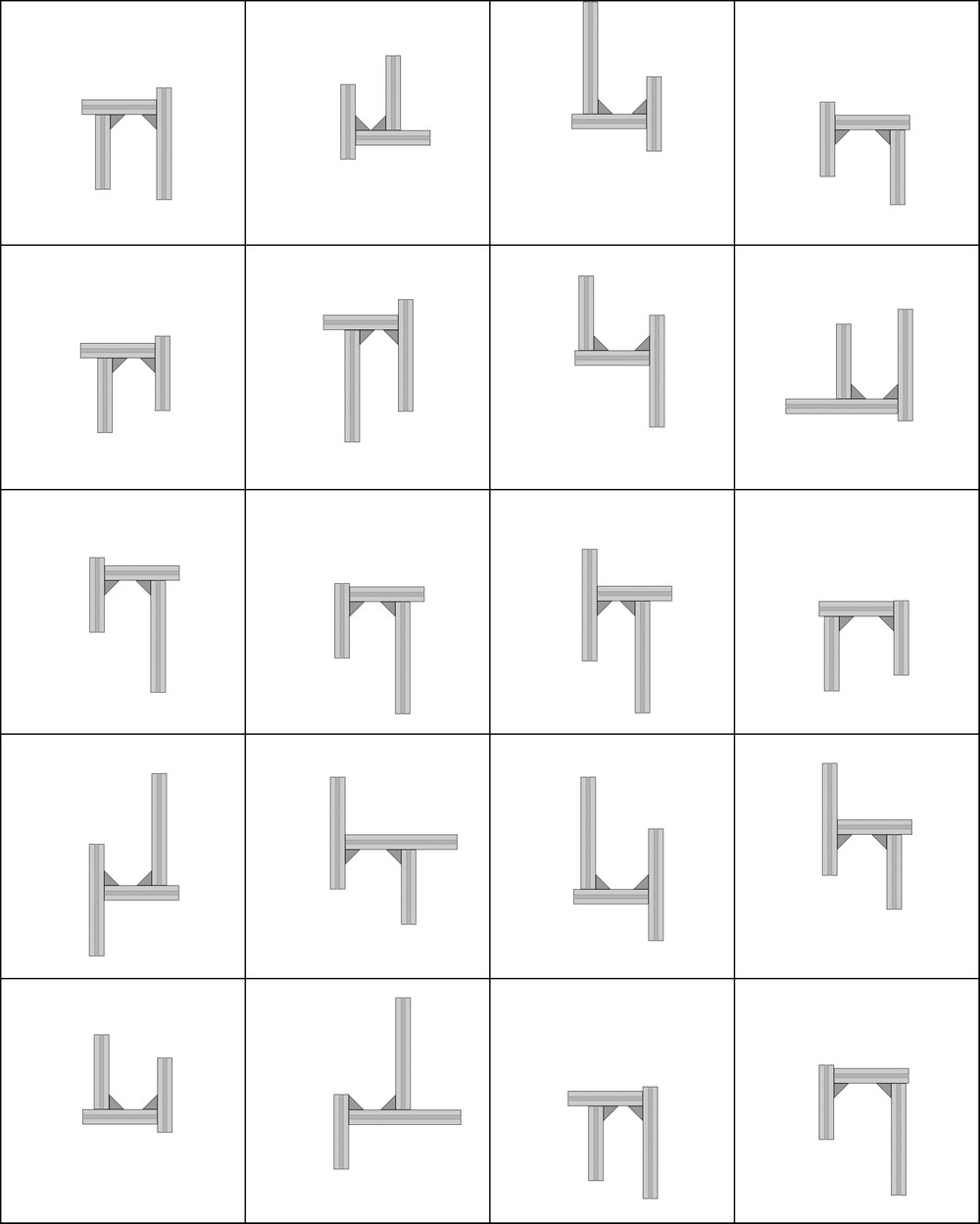
Topology 3
Cluster 1
Cluster 2
item_profile_200_1<item_profile_200_2
item_profile_200_2<item_profile_200_1
Cluster 3
item_profile_300_1<item_profile_200_1
item_profile_300_1<item_profile_200_2
Cluster 4
item_profile_200_2<item_profile_200_1
item_profile_200_2<item_profile_300_1
Topology 4
Cluster 1
item_profile_300_1<item_profile_300_2
item_profile_300_2<item_profile_300_1
Cluster 2
Topology 5
Cluster 1
item_profile_300_1<item_profile_300_2
item_profile_300_2<item_profile_300_1
Cluster 2
Cluster 3
item_profile_200_2<item_profile_200_1
item_profile_200_2<item_profile_300_1


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}