
3D Object Tracking

{kind=link}
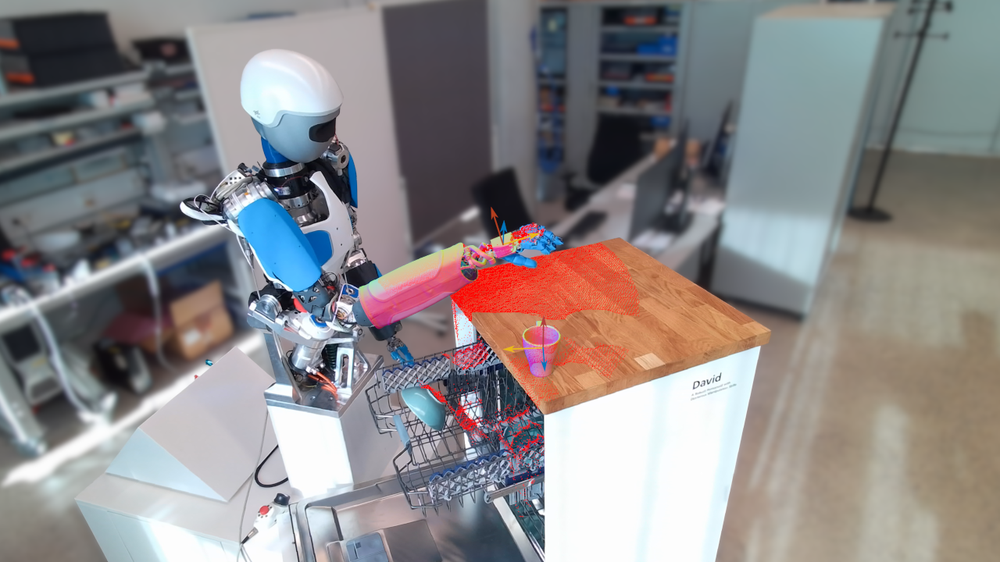
Die visuelle Verfolgung von Objekten und sich bewegenden Strukturen im dreidimensionalen Raum sowie die Bestimmung ihrer Lage und Beschaffenheit ist eine wesentliche Aufgabe im Bereich Computer Vision. Die Anwendungen reichen von Augmented Reality bis hin zur Wahrnehmung durch Roboter. Ausgehend von aufeinanderfolgenden Einzelbildern sowie 3D-Netzen und kinematischen Informationen besteht das Ziel darin, die Rotation und Translation aller Objekte relativ zu einer Kamera robust zu schätzen. Obwohl das Problem bereits gründlich erforscht wurde, gibt es immer noch viele Herausforderungen, wie z.B. partielle Verdeckungen, Änderungen des Aussehens, Bewegungsunschärfe, Hintergrundstörungen, Mehrdeutigkeit von Objekten und Echtzeitanforderungen.
Die Software-Kollektion 3D Object Tracking enthält Algorithmen aus unserer aktuellen Forschung zur 3D-Objektverfolgung. Die Ordner für die verschiedenen Algorithmen enthalten alles, was notwendig ist, um die in unseren Veröffentlichungen vorgestellten Ergebnisse zu reproduzieren. Die aktuellste Version unseres Quellcodes ist im Package M3T zu finden.
Weitere Informationen finden Sie in unserem GitHub-Repository sowie unseren Veröffentlichungen.
Download Link: https://github.com/DLR-RM/3DObjectTracking
Publikationen
- Manuel Stoiber, Martin Pfanne, Klaus Strobl, Rudolph Triebel, Alin Olimpiu Albu-Schäffer, "A Sparse Gaussian Approach to Region-Based 6DoF Object Tracking", in: 15th Asian Conference on Computer Vision, ACCV 2020, Kyoto, Japan, pp. 666-682, 2020 [elib] (presentation and demonstration videos)
- Manuel Stoiber, Martin Pfanne, Klaus Strobl, Rudolph Triebel, Alin Olimpiu Albu-Schäffer, "A Sparse Region-Based 3D Object Tracking Approach for the Real World", International Journal of Computer Vision, pp. 1008-1030, April 2022 [elib] (video)
- Manuel Stoiber, Martin Sundermeyer, Rudolph Triebel, "Iterative Corresponding Geometry: Fusing Region and Depth for Highly Efficient 3D Tracking of Textureless Objects", in: IEEE. 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, pp. 6845-6855, 18-24 Jun 2022 [elib] (presentation and demonstration videos)
- Manuel Stoiber, Mariam Elsayed, Anne E. Reichert, Florian Steidle, Dongheui Lee, Rudolph Triebel, "Fusing Visual Appearance and Geometry for Multi-modality 6DoF Object Tracking" https://arxiv.org/abs/2302.11458 (video)
- Manuel Stoiber, Martin Sundermeyer, Wout Boerdijk, Rudolph Triebel "A Multi-body Tracking Framework - From Rigid Objects to Kinematic Structures" https://arxiv.org/abs/2208.01502 (video)