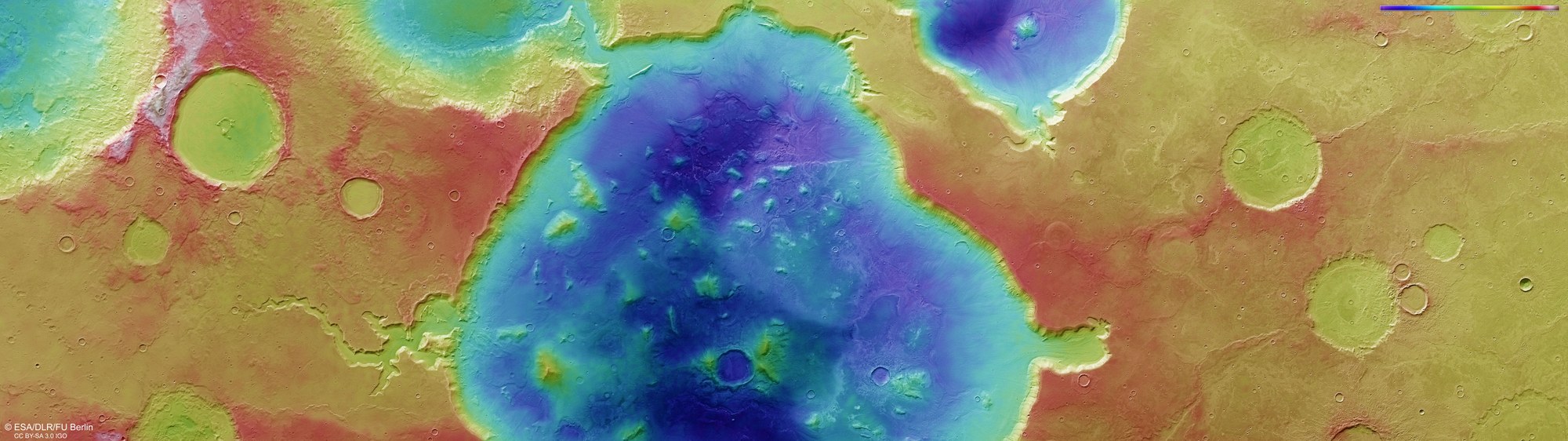
Topographic map of Deuteronilus Cavus

Topographic map of Deuteronilus Cavus
DLR's HRSC stereo camera onboard Mars Express uses its nine sensors to capture the Martian surface at various viewing angles along the flight direction. The DLR Institute of Space Research and the Planetary Sciences and Remote Sensing group at the Freie Universität Berlin use data from two forward- and backward-looking stereo channels, along with the nadir (downward-looking) channel, to generate digital terrain models (DTMs) assigning elevation data to every pixel. The colour scale at the top right of the image indicates elevations relative to the 'areoid' – a theoretical, idealised surface representing Mars' version of sea level, as if all depressions on the planet were filled with water. It shows that the Deuteronilus Cavus depression – now partially filled with eroded material – is still more than 2000 metres deep today.
{kind=link}