Two robotic hands cooperating to handle a tool

Two robotic hands cooperating to handle a tool
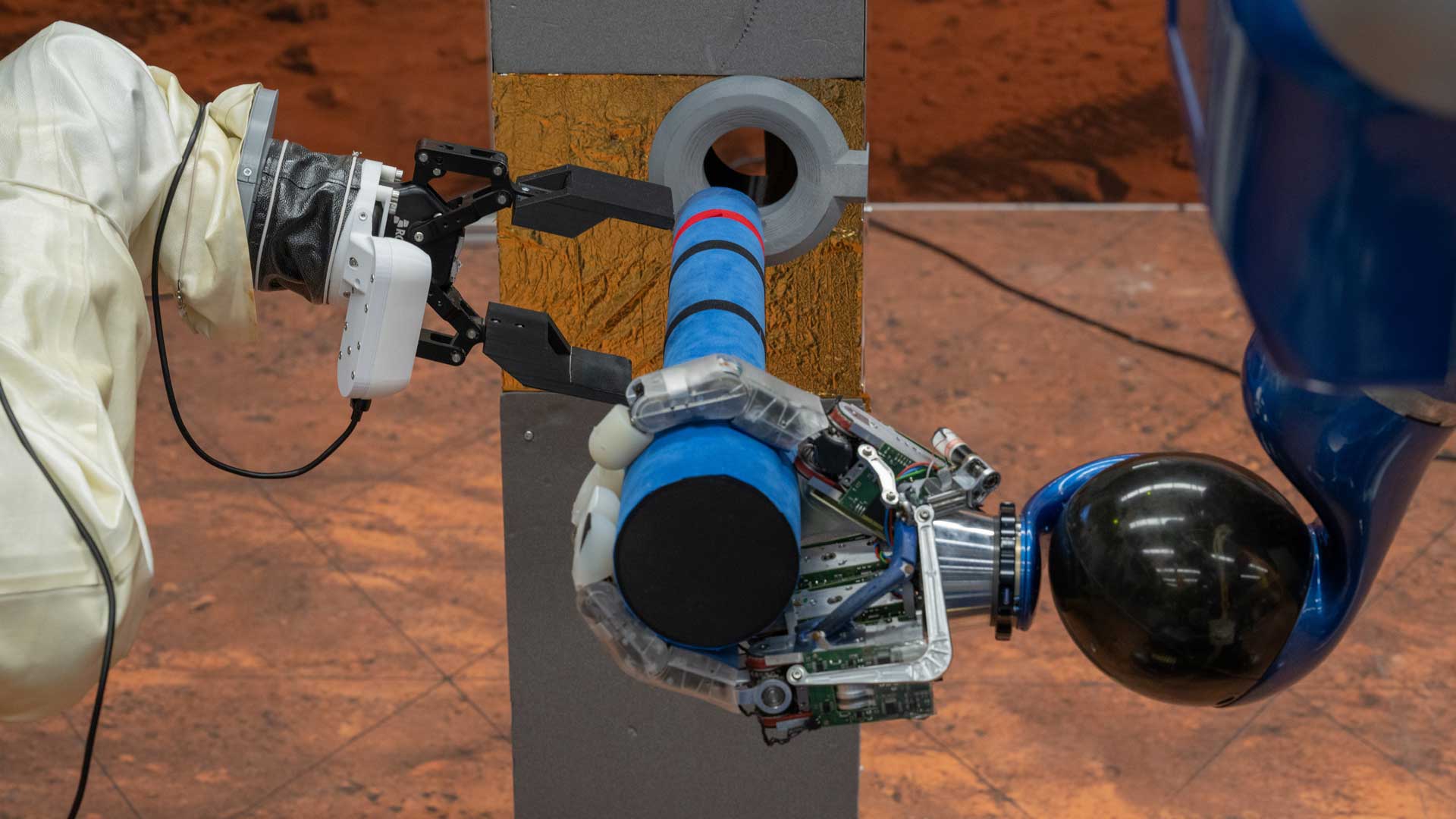
While the arm of the DLR humanoid robot (right) independently carries an object, an astronaut controls the ESA Interact Rover's arm (left). The astronaut guides the object to the target position. The new approach allows for the humanoid to maintain the object's rotation while yielding to the rover arm during linear movements.