Cover story from the DLRmagazine 180: Endoscopic robots inspect and repair in the tightest spaces
Precise as a surgeon
Robot in a former Pearl 700 development engine
Researchers at the DLR Institute of Maintenance, Repair and Overhaul are testing minimally invasive inspection and repair techniques on a former Rolls-Royce Germany Pearl 700 development engine. The ultimate goal is to eventually service an engine directly on the aircraft without having to disassemble it.
When you hear the term 'ultrasound scan', you likely think of a visit to the doctor. For physicians, ultrasound diagnosis is a quick, non-invasive method to produce an image of the inside of the human body. This image must be interpreted, but in many cases serves as a starting point for further diagnostics.
Detecting material damage with sound
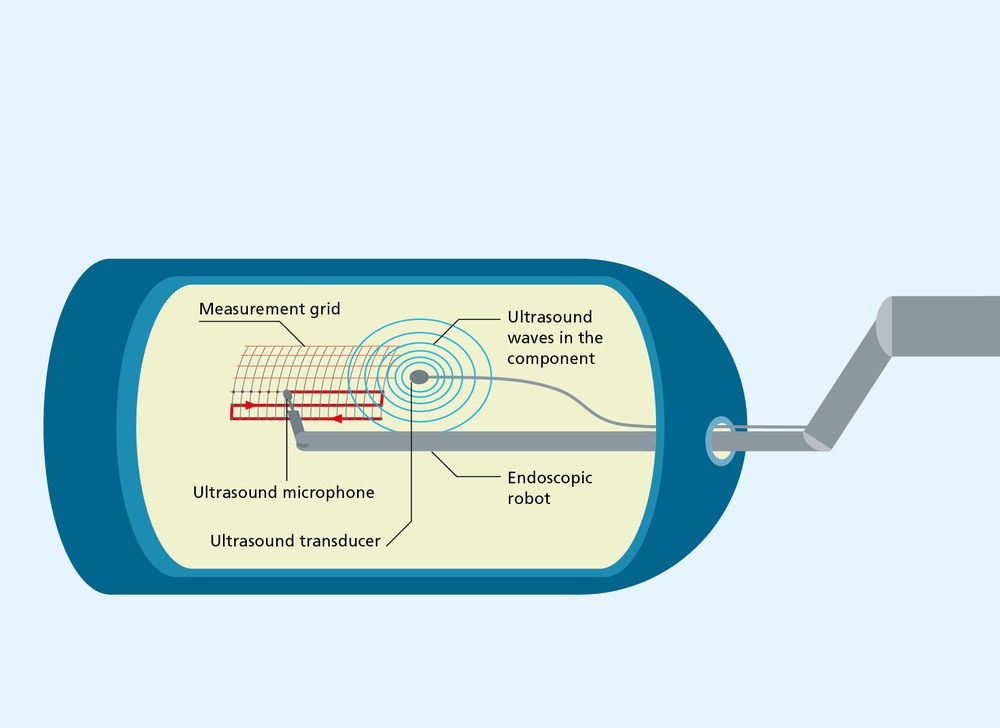
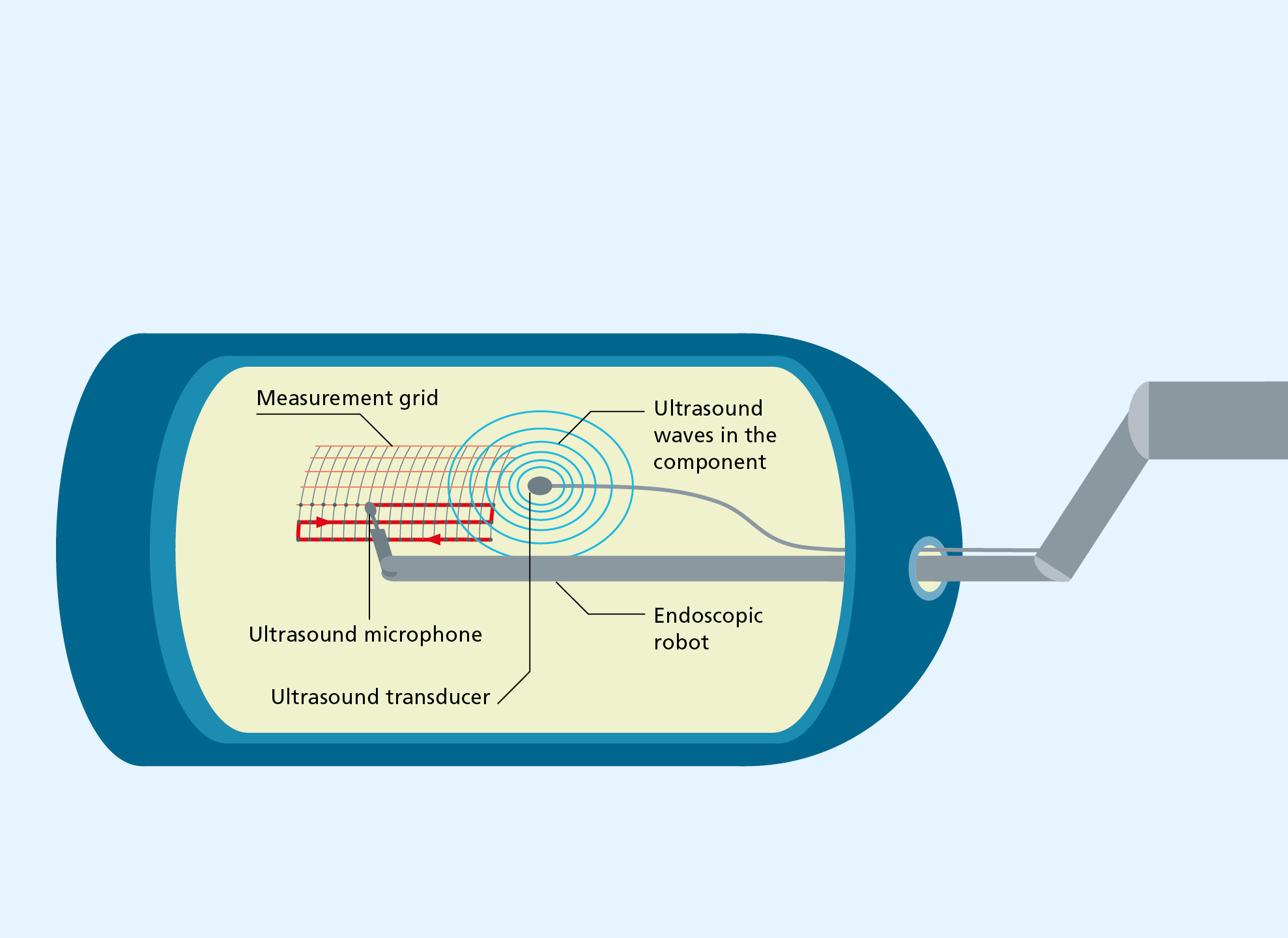
An endoscopic robot arm uses a microphone to systematically analyse how ultrasound waves propagate through the component.
Ultrasound is however also used in aviation, with the primary goal of detecting irregularities in materials – such as cracks or delaminations, where entire layers separate – which could worsen if ignored. However, the technique places enormous demands on maintenance personnel. Since ultrasound scanners must be manually guided over a component, calm, patience and concentration are essential. Moreover, expertise is required to recognise any anomalies that come up. If an inspection is repeated later to assess how a defect has developed, it must first be relocated. Finding a tiny, invisible crack on a fuselage segment several metres long – which is often painted a single colour – is not only difficult but also poses a risk. What if a new defect is mistaken for the old one – and the old one effectively missed?
Preparing a robot for an ultrasound scan
DLR researcher Caspar Wasle prepares a robot for an ultrasound examination (left).
Credit:
ZAL/Daniel Reinhardt
To make such inspections simpler and safer, researchers at the DLR Institute of Maintenance, Repair and Overhaul in Hamburg are developing robot-assisted ultrasound testing, using contactless methods.
Robot used for component inspection
An endoscopic robot automatically inspects a component with ultrasound (below).
Credit:
ZAL/Daniel Reinhardt
There are various methods for transmitting ultrasound pulses to a component. In one, a piezoelectric ceramic is bonded to the component's surface, causing the material to vibrate through mechanical impulses. Another uses a laser to generate very short, high-intensity light pulses, causing the material to rhythmically heat and cool. This heating causes the material to expand slightly in a wave-like pattern.
Making the invisible visible
The resulting sounds are very faint and very high-frequency. At up to two million hertz, they are as inaudible to humans as they are even to bats. Highly specialised laser ultrasound microphones can, however, record these sounds. When such microphones are guided by a robot, a large number of measurement points can be targeted with precision. The result is an image that reveals even the smallest irregularities in the component, allowing initial assessments of the nature of the anomaly.
This technique will become increasingly important in the future for new carbon fibre reinforced polymer (CFRP) materials, as delaminations could otherwise go undetected. "With aluminium, cracks on the surface of the aircraft skin can be spotted early on", emphasises Caspar Wasle. "With CFRP structures, we have to make the invisible visible." Together with his colleagues, Wasle has already examined a miniature hydrogen tank using a robot-guided ultrasonic microphone – a unique undertaking in the field of 'maintenance, repair and overhaul' (MRO). The team was also able to detect damage on the back side of the material, in areas that would be inaccessible during routine maintenance.
Robot-assisted ultrasound inspection not only operates without fatigue and delivers accurate results; it also provides location data that enables the precise localisation of damage to the component. This traceability is key to the effectiveness of all subsequent measures – a true game-changer for MRO. This makes it possible, first of all, to report any anomalies to manufacturers with precise location data, meaning they can incorporate this information into future designs. Secondly, it allows for recurring observational inspections of specific problem areas. "At present, ultrasound data is often still treated as disposable," says Wasle. "We record it in such quantity and quality that we can monitor its development."
Endoscopic and autonomous
Endoscopic arm of the Elise robot
Elise has a modular design. The length of the endoscopic arm and the number of joints are variable, and its movements are controlled via cables which are housed in the cylindrical control module.
At first glance, it looks rather unremarkable. Although, judging by the name – Elise – 'she' might be more appropriate. Slim and rodshaped, Elise is equipped with three joints at the end that allow free movement of the head. This movement is achieved using cables, based on the 'antagonistic' principle. Imagine it like a human arm, which is also moved by opposing muscles – biceps and triceps. The robot's head can accommodate sensors or tools, depending on requirements. But Elise's special feature is its ability to operate endoscopically, reaching difficult-to-access areas inside an aircraft for minimally invasive inspection.
Florian Heilemann, who designed Elise, drew inspiration from surgical robots. In medicine, robots are already used to perform minimally invasive operations on humans and must therefore meet comparable requirements in terms of precision and reliability. But there is a crucial difference. In medicine, robots are currently teleoperated – remotely controlled – by doctors, usually based on a camera image. Elise, however, is designed to perform autonomous inspection and repair tasks. This is a significant step. While medical personnel can reposition the robot head if it is not in the correct position, Elise should be able to operate 'blind', always knowing precisely where it is and the alignment of its three joints.
Florian Heilemann in the robotics area of the project laboratory
Florian Heilemann in the robotics area of the project laboratory of the Institute of Maintenance, Repair and Overhaul.
Credit:
ZAL/Daniel Reinhardt
To enable this kind of absolute positioning, Heilemann uses 'discrete rotary joints' with magnetic field sensors. These can determine the joint's exact deflection angles at any time, even after an interruption, so the operator always knows exactly what Elise is looking at. Locating the joints has further advantages, as changes in the tendon length do not affect how the mechanism behaves, and tendons can be pre-tensioned to set the joint's stiffness.
This allows the robot to exert defined forces and also to detect when it encounters an obstacle inside. In such cases, the cable tension increases sharply and the robot provides feedback. The tendons run along the robot arm to a compact control unit, where they are wound up by small electric motors. From here, the collected data is transmitted wirelessly. The entire design is modular, and the length of individual sections can be adapted to requirements, as can the number of joints. Another detail: Elise's arm has a semi-circular cross-section. This allows for easy routing of cables that transmit sensor data to the control unit. This simple design enables flexible deployment with short setup times.
In aviation, many application scenarios are possible. Inspections are often carried out in situ, which means that the component remains in its original position. Elise could, for example, inspect an engine without it having to be removed from the wing or dismantled. This can save many hours of work and help to avoid errors. "We think of the hangar like an operating theatre," says Heilemann. "The smaller the procedure, the faster our patient is back in the air."
Tiny meteorite craters
Magnetic field sensors
Magnetic field sensors allow Elise’s swivel joints to be precisely aligned. Once the endoscope has been inserted into a component, it is essential to know exactly where it is to avoid collisions.
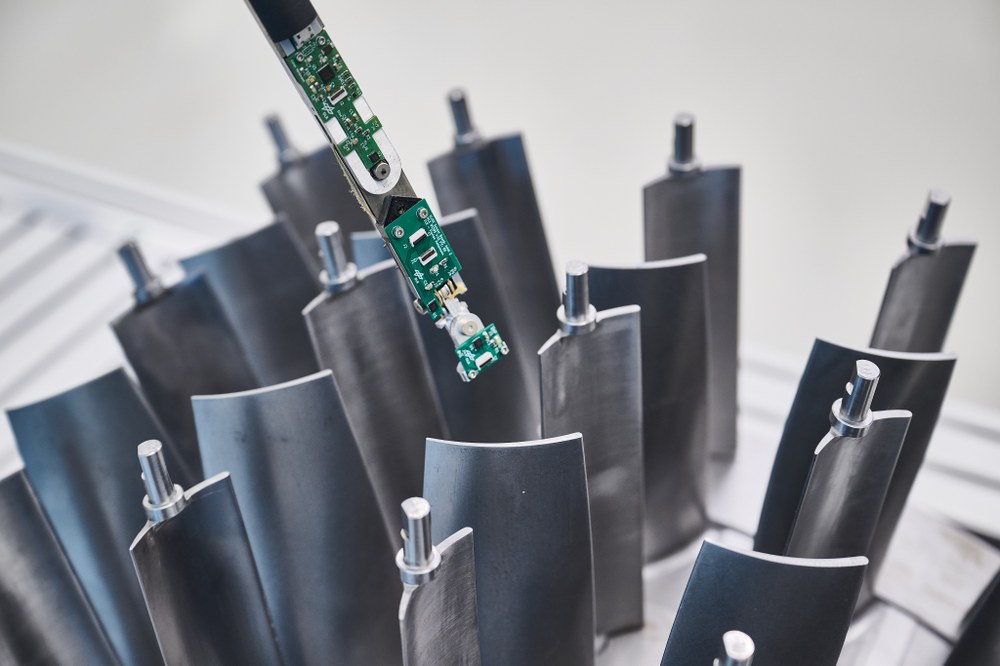
Inspection is, however, only one side of the coin. In the future, endoscopic robots are also set to carry out repairs in hard-to-reach areas. Researchers have already set their sights on a particularly complex problem: the robot-assisted autonomous profiling of compressor blades in the engine. The basic problem is easily explained: an aircraft engine is constructed in stages, with the large fan (with the large blades) only visible at the front, and behind it numerous compressor and turbine stages in several rows, with many small rotor blades (rotating) and stator blades (fixed) that guide the airflow. These blades, often only a few centimetres long, are subject to immense stresses during flight. They withstand compressive and tensile forces, extreme temperature fluctuations and, in some cases, rotate at supersonic speeds. At such speeds, sand and dust particles striking the blades act like tiny meteorites pelting the material. Even water droplets leave their mark.
This is particularly problematic for the first row of high-pressure compressor blades. They bear the brunt of the impact, yet are crucial to the engine's efficient operation. "You can think of these blades like kitchen knives," explains DLR researcher Fabian Wieczorek. "When they are blunt, they no longer cut cleanly through the air." The result is an approximately 0.1 percent increase in kerosene consumption. That may not sound like much, but on a single long-haul flight consuming 200 tonnes of kerosene, it amounts to an extra 200 kilograms. On top of that, a few extra litres of kerosene are needed to carry those 200 kilograms. After all, in aviation, every extra kilogram means more fuel consumption.
If blunt compressor blades are such a problem, what could be more logical than sharpening them? Unfortunately, this currently requires disassembling the entire engine – a mammoth task that costs many hours of labour and a lot of money, and is therefore often only carried out during scheduled maintenance intervals.
Sharpening 30 knives – with your eyes closed
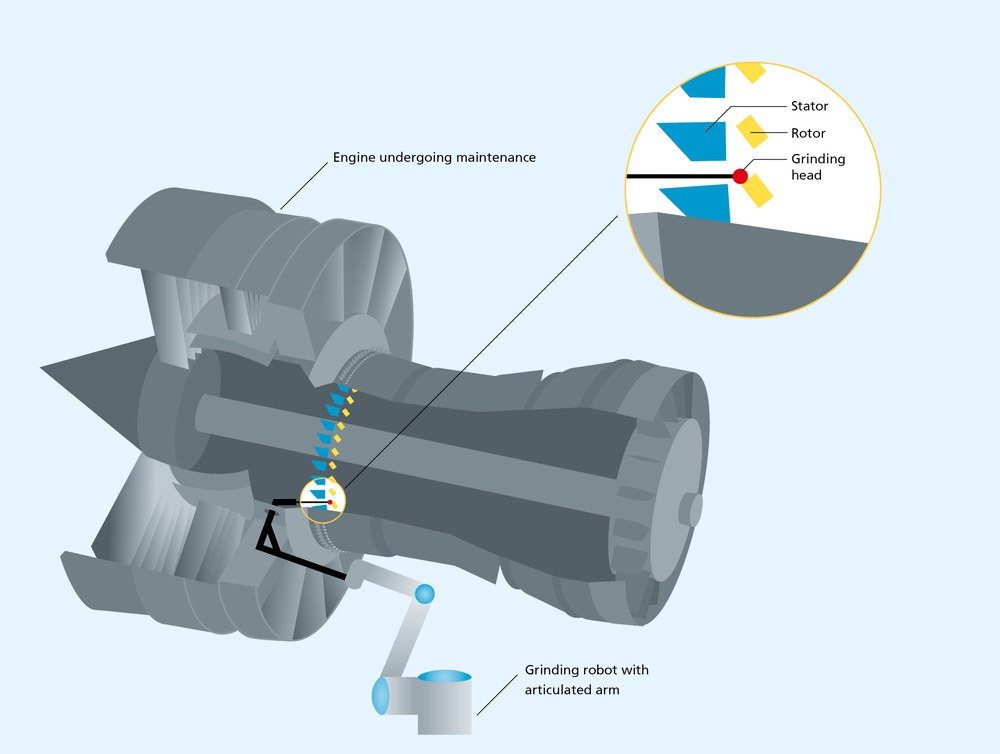
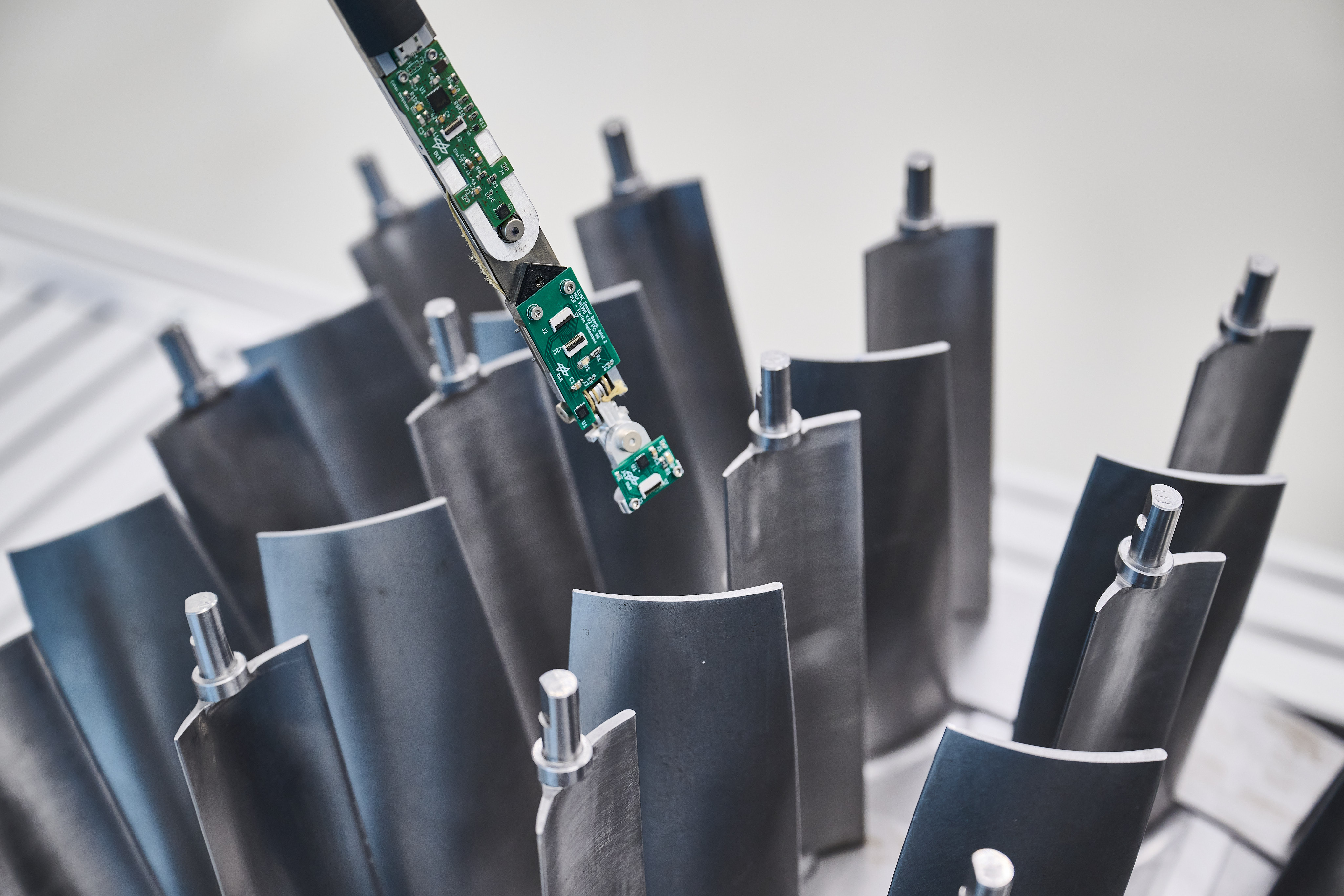
Grinding of worn rotor blades
In the GreenMES project, a robot is being developed to grind the compressor blades of engines in situ, making them efficient again. This means the engine no longer needs to be completely disassembled for grinding, saving time and costs. With a precisely calculated curved movement, the rigid robot arm winds its way through the small maintenance opening to the first blade and uses a camera to check its condition. It then picks up a tool and, ‘blind’, grinds the blade, using the camera to check its work.
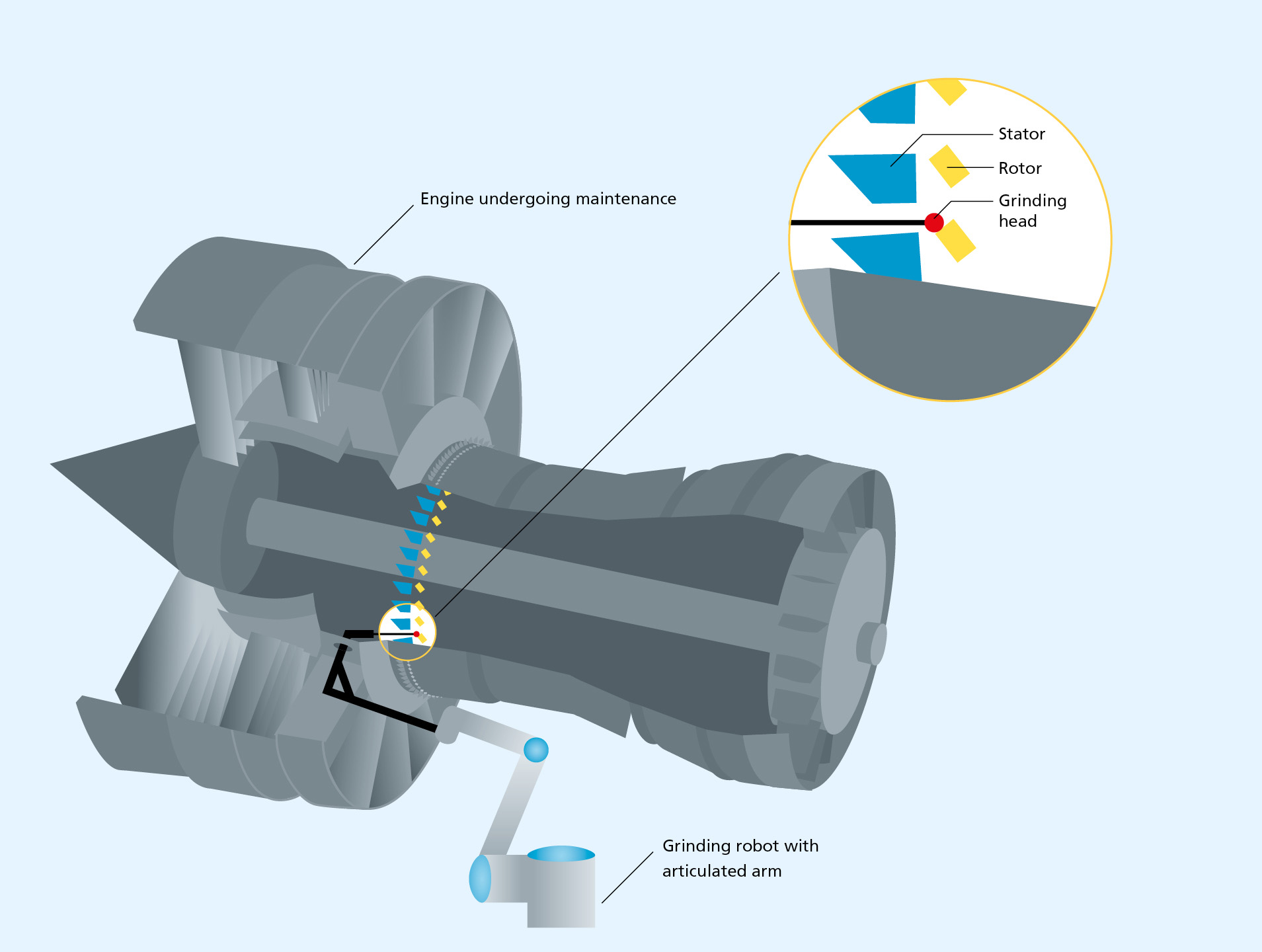
In the aviation research project GreenMES (Green Mobile Engine Services), DLR and Lufthansa Technik, the Institute of Aircraft Production Technology at the Hamburg University of Technology (TUHH) and the company IT Concepts are working on automatically sharpening the blades of a high-pressure compressor stage using a robot, without having to disassemble the engine. The first compressor stage has more than 30 rotor blades, so to dramatise a little, the goal is akin to having a machine sharpen 30 very expensive knives directly in the kitchen drawer, without opening it more than a few centimetres and with your eyes closed.
This is how it is supposed to work: First, a robotic arm guides a tool carrier equipped with a 3D camera into the engine's maintenance opening. This is only possible if it executes a precisely calculated curved movement. The robot head manoeuvres through a narrow opening between several fixed guide vanes and reaches the first rotor blade. This blade is then measured in three dimensions, creating a high-resolution 3D model. Particular attention is paid to the blade's leading edge. Here, tiny craters can be seen – the result of particles impacting the metal at supersonic speeds. Surgical precision is then required: the robot uses a grinding tool to wear down the blade with precisely planned yet minimal movements of the robotic arm. DLR researcher Wieczorek is programming software for this process, which includes monitoring and controlling the grinding process and features a functional user interface. The grinding and visual inspection process is repeated several times until the nominal profile is restored.
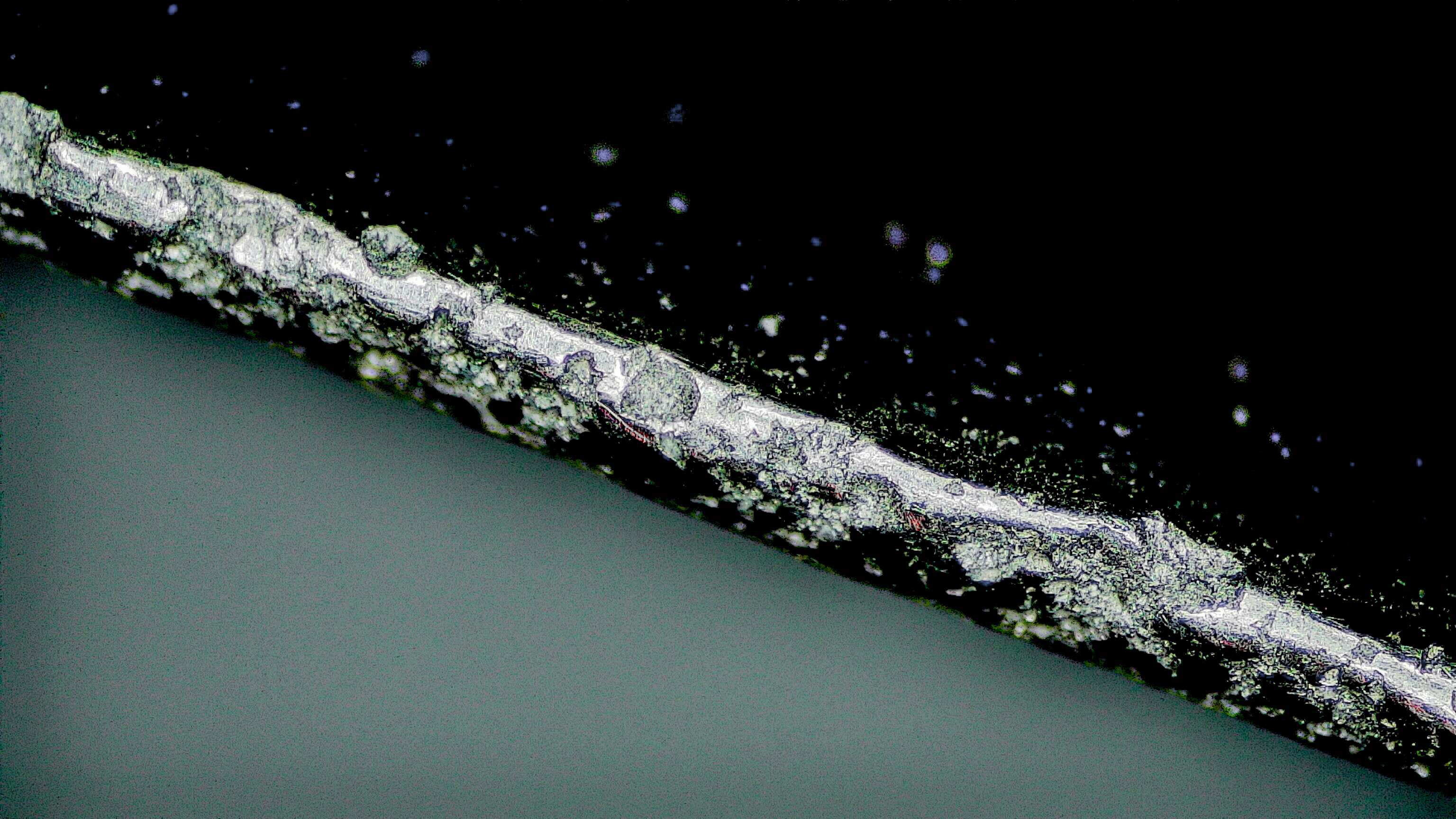
A compressor blade under the microscope
Moonscape: Under the microscope it is clear to see what dust and water have done to the compressor blade.
Precise motion planning of the robot is crucial, as the leading edge has a radius of just 0.3 millimetres. This also explains why the tool carrier is designed as a very rigid structure without joints, as the precision required would otherwise be impossible to achieve. The key factor here is repeat accuracy. The robot does not need to know its exact location; it only needs to move the tool precisely to the position it had previously identified with the camera.
This makes it clear that robots can only realise their full potential and simplify maintenance processes if hardware and software development go hand in hand. In an environment like MRO, where often only tiny access openings are available for high-precision measurements, corrective interventions and the documentation of results, endoscopic robots come into their own and have the potential to sustainably transform the MRO industry.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}