Titelgeschichte aus dem DLRmagazin 180: Endoskopische Roboter inspizieren und reparieren Flugzeuge auf engstem Raum
Präzise wie ein Chirurg
Roboter in einem ehemaligen Pearl-700-Entwicklungstriebwerk
An einem ehemaligen Pearl-700-Entwicklungstriebwerk von Rolls-Royce Deutschland erproben Forschende des DLR-Instituts für Instandhaltung und Modifikation minimalinvasive Inspektion und Reparatur. Das große Ziel: ein Triebwerk irgendwann direkt am Flugzeug warten, ohne es auseinanderzubauen.
Wer das Wort Ultraschalluntersuchung hört, denkt vielleicht zunächst an einen Arztbesuch. Für die Medizinerin oder den Mediziner ist die Diagnose mit Ultraschall eine schnell durchführbare, nicht-invasive Methode, die ein Bild vom Inneren des menschlichen Körpers erzeugt. Dieses Bild muss interpretiert werden, bietet sich aber in vielen Fällen als Ausgangspunkt für weitere Diagnostik an.
Auch in der Luftfahrt wird die Inspektion mittels Ultraschall angewendet. Meist sollen Unregelmäßigkeiten im Material aufgedeckt werden – Risse oder Delaminationen etwa, also die Ablösung ganzer Schichten –, die sich bei Nichtbeachtung vergrößern könnten. Die Anforderungen an das Instandhaltungspersonal sind enorm: Da die Ultraschallscanner von Hand über das Bauteil geführt werden müssen, sind Ruhe, Geduld und Konzentration erforderlich. Außerdem braucht es Erfahrung, um Anomalien als solche zu erkennen. Wenn später eine Inspektion wiederholt wird, um zu beurteilen, wie sich ein Defekt entwickelt hat, muss dieser zunächst aufgefunden werden. Einen winzigen, unsichtbaren Riss auf einem meterlangen Rumpfsegment wiederzufinden, das zudem oft einfarbig lackiert ist, bedeutet jedoch nicht nur Mühe, sondern stellt auch ein Risiko dar. Was, wenn eine neue Schadstelle versehentlich für die alte gehalten wird und diese den Fachleuten dadurch entgeht?
Vorbereitung eines Robotors auf eine Untersuchung mit Ultralschall
DLR-Wissenschaftler Caspar Wasle bereitet einen Roboter auf eine Ultraschalluntersuchung vor.
Credit:
ZAL/Daniel Reinhardt
Um solche Prüfungen einfacher und sicherer zu machen, arbeiten Forschende am Institut für Instandhaltung und Modifikation in Hamburg an der Entwicklung von robotergestützter Ultraschalluntersuchung. Zum Einsatz kommen dabei berührungslose Verfahren.
Robotor bei der Bauteilprüfung
Ein endoskopischer Roboter prüft ein Bauteil vollautomatisch mit Ultraschall.
Credit:
ZAL/Daniel Reinhardt
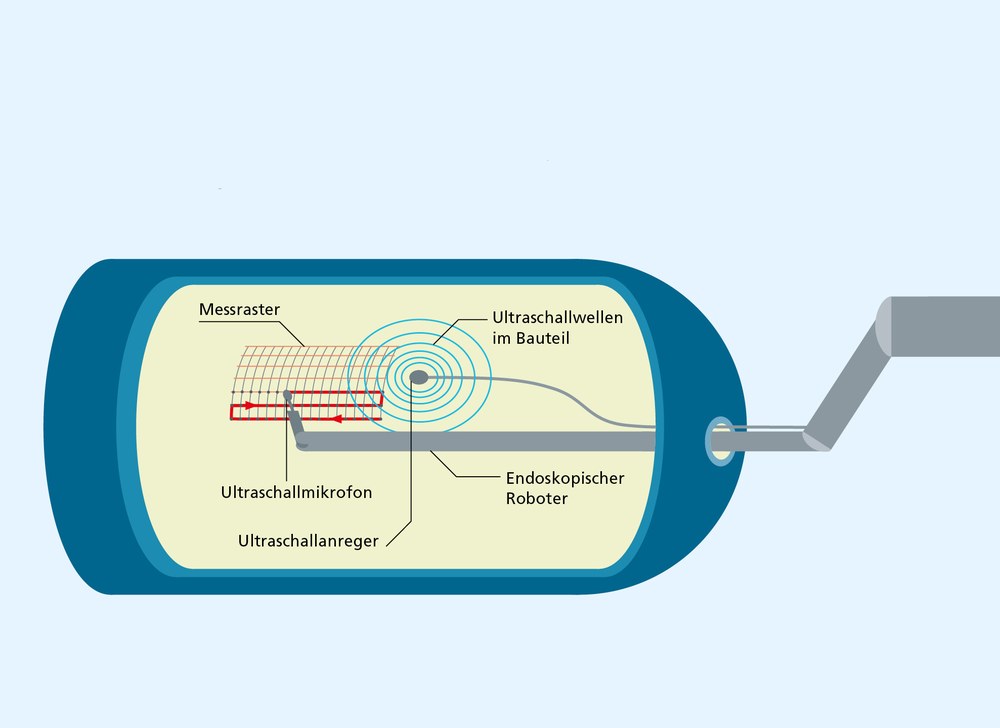
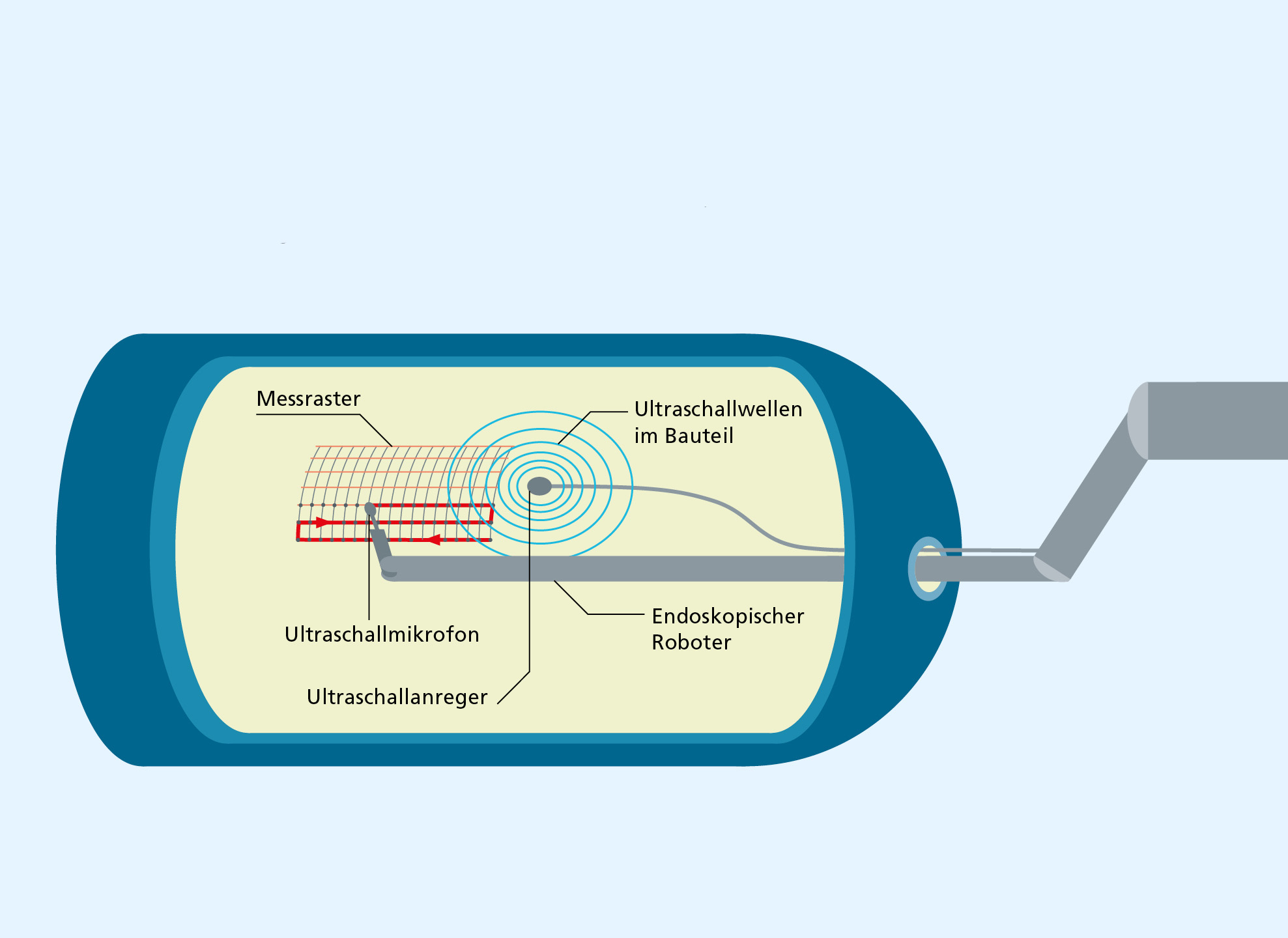
Um die Schallimpulse auf das Bauteil zu übertragen, gibt es verschiedene Methoden. Bei einer wird eine Piezokeramik auf die Oberfläche geklebt, die diese mit mechanischen Stößen in Schwingung bringt. Eine andere Methode nutzt einen Laser, der sehr kurze, hochintensive Lichtpulse erzeugt und so das Material rhythmisch erwärmt und abkühlt. Durch diese Erwärmung dehnt sich das Material dann minimal wellenförmig aus.
Das Unsichtbare sichtbar machen
Die resultierenden Klänge sind sehr leise und sehr hochfrequent. Mit bis zu zwei Millionen Hertz sind sie für Menschen genauso unhörbar wie für Fledermäuse. Hochspezialisierte Laserultraschallmikrofone jedoch können die Töne aufzeichnen. Wenn ein Roboter die Mikrofone führt, kann eine große Zahl von Messpunkten präzise angefahren werden. Das Ergebnis ist dann ein Bild, das auch sehr kleine Unregelmäßigkeiten im Bauteil aufdeckt und bereits erste Einschätzungen über die Natur der Anomalie erlaubt.
Bei neuen Kohlefaserverbundmaterialien (CFK) wird das in Zukunft immer wichtiger, da sich hier ansonsten Delaminationen unbemerkt ausbreiten könnten. „Bei Aluminium kann man Risse in der Flugzeughaut frühzeitig an der Oberfläche sehen“, betont Caspar Wasle. „Bei CFK-Strukturen müssen wir das Unsichtbare sichtbar machen.“ Gemeinsam mit seinen Kollegen hat er bereits einen Miniatur-Wasserstofftank per robotergeführtem Ultraschallmikrofon untersucht – ein bislang einmaliges Unterfangen im Bereich MRO (Maintenance, Repair and Overhaul, deutsch: Wartung, Reparatur und Überholung). Dabei konnte das Team auch Beschädigungen auf der Rückseite des Materials sichtbar machen, an Stellen also, die bei einer gewöhnlichen Instandhaltung gar nicht zugänglich wären.
Die robotische Ultraschallinspektion arbeitet nicht nur ermüdungsfrei und bietet genaue Ergebnisse. Sie liefert auch Ortsdaten, die eine präzise Lokalisation von Schäden am Bauteil erlauben. Diese Auffindbarkeit ist der Schlüssel für die Wirksamkeit aller weiteren Maßnahmen – ein wahrer Game Changer für die MRO. Denn damit wird es zum einen möglich, jede Auffälligkeit präzise lokalisiert an Hersteller zu melden, die diese Daten in künftige Designs einfließen lassen können. Und zum anderen erlaubt dies wiederkehrende beobachtende Prüfungen bestimmter Problemstellen. „Momentan sind Ultraschalldaten häufig noch Wegwerfdaten“, so Wasle. „Wir zeichnen sie in einer Quantität und Qualität auf, mit der man künftig aber ihre Entwicklung beobachten kann.“
Endoskopisch und autonom
Endoskopischer Arm des Roboters Elise
Der Roboter Elise ist modular aufgebaut. Die Länge des endoskopischen Arms und die Anzahl der Gelenke sind variabel. Die Bewegungen werden über Seilzüge gesteuert, die im zylinderförmigen Kontrollmodul verbaut sind.
Auf den ersten Blick sieht er recht unspektakulär aus. Wobei, dem Namen nach ist „er“ ja eine „sie“: Elise. Schlank und stabförmig, am Ende mit drei Gelenken ausgestattet, die eine freie Bewegung des Kopfes gestatten. Die Auslenkung erfolgt mittels Seilzügen nach dem antagonistischen Prinzip. Das darf man sich vorstellen wie beim menschlichen Arm, der ja ebenfalls durch gegenüberliegende Muskeln – Bizeps und Trizeps – bewegt wird. Der Kopf des Roboters kann Sensoren oder Werkzeuge aufnehmen, je nach Anforderung. Das Besondere an Elise ist jedoch, dass sie endoskopisch operieren kann und somit schwer zugängliche Stellen im Flugzeug erreicht – minimalinvasive Inspektion.
Florian Heilemann, der Elise konstruiert hat, hat sich an Vorbildern aus der Chirurgie orientiert. Dort kommen bereits Roboter zum Einsatz, die minimalinvasiv Operationen am Menschen vornehmen und damit vergleichbare Anforderungen erfüllen müssen in Bezug auf Genauigkeit und Verlässlichkeit. Allerdings gibt es einen entscheidenden Unterschied: In der Medizin werden Roboter heute teleoperiert, also von Ärztinnen und Ärzten ferngesteuert. Die Grundlage bildet meist ein Kamerabild. Elise hingegen soll in die Lage versetzt werden, autonom Inspektions- oder Reparaturaufgaben durchzuführen. Das ist ein bedeutender Schritt: Denn während das medizinische Personal den Roboterkopf repositionieren kann, wenn er nicht an der richtigen Stelle ist, soll Elise auch blind operieren können und stets wissen, wo genau sie sich befindet und wie ihre drei Gelenke ausgerichtet sind.
Florian Heilemann im Robotikbereich des Projektlabors
Florian Heilemann im Robotikbereich des Projektlabors des DLR-Instituts für Instandhaltung und Modifikation
Credit:
ZAL/Daniel Reinhardt
Um eine solch absolute Positionierung zu ermöglichen, verwendet Heilemann sogenannte diskrete Drehgelenke mit Magnetfeldsensoren. Diese können jederzeit, auch nach einer Unterbrechung, ihre genauen Auslenkwinkel feststellen. Damit man immer weiß, was Elise sich gerade ansieht. Den genauen Zustand der Gelenke zu kennen, hat noch weitere entscheidende Vorteile: Dehnungstoleranzen können dem Seilzugsystem nichts anhaben, außerdem kann es mit Vorspannungen beaufschlagt werden. Das ermöglicht eine definierte Kraftausübung des Roboters und erlaubt es darüber hinaus, zu erkennen, wenn der Roboter im Inneren gegen ein Hindernis stößt. Denn dann steigt die Seilspannung stark an und der Roboter gibt eine Rückmeldung. Die Seile verlaufen entlang des Roboterarms bis zu einer kompakten Steuerungseinheit, wo sie von kleinen Elektromotoren aufgewickelt werden. Von hier aus werden die gesammelten Daten kabellos übertragen.
Das ganze Design ist modular aufgebaut. Die Längeder einzelnen Sektionen kann genauso an die Anforderungen angepasst werden wie die Anzahl der Gelenke. Ein weiteres Detail: Der Querschnitt von Elises Arm ist halbrund. So können Kabel, die die Sensordaten zur Steuerungseinheit übertragen, einfach aufgelegt werden. Diese Schlichtheit im Aufbau erlaubt flexible Einsätze bei kurzen Rüstzeiten.
In der Luftfahrt sind viele Einsatzszenarien denkbar. Inspektionen werden dort oft in situ durchgeführt, das bedeutet, dass das Bauteil dabei an seinem ursprünglichen Ort bleibt. Elise könnte also beispielsweise ein Triebwerk untersuchen, das dafür nicht von der Tragfläche abgenommen und nicht auseinandergebaut werden muss. Das kann viele Arbeitsstunden einsparen und helfen, Fehler zu vermeiden. „Wir denken den Hangar wie einen OP-Saal“, sagt Heilemann. „Je kleiner der Eingriff, desto schneller ist unser Patient wieder in der Luft.“
Magnetfeldsensoren
Magnetfeldsensoren erlauben es, festzustellen, wie die Drehgelenke von Elise ausgerichtet sind. Ist das Endoskop erst einmal in ein Bauteil eingetaucht, ist es essenziell, darüber genau Bescheid zu wissen, um nirgendwo anzustoßen.
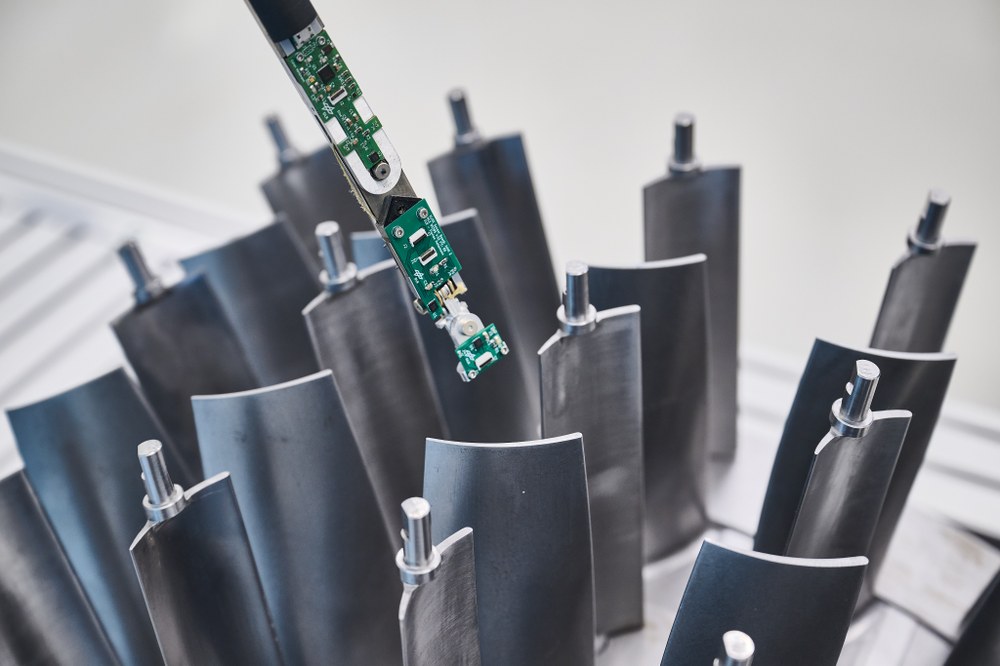
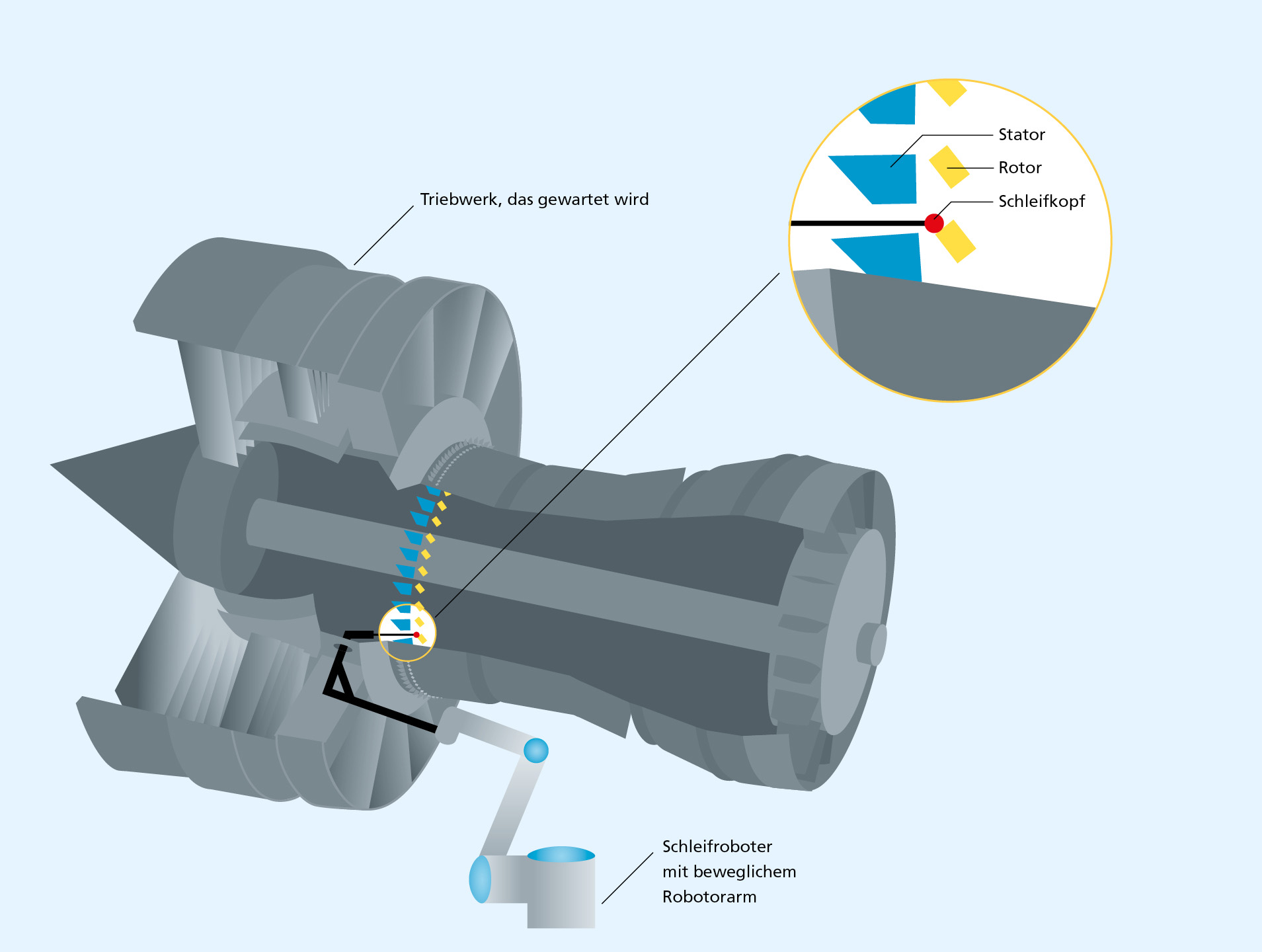
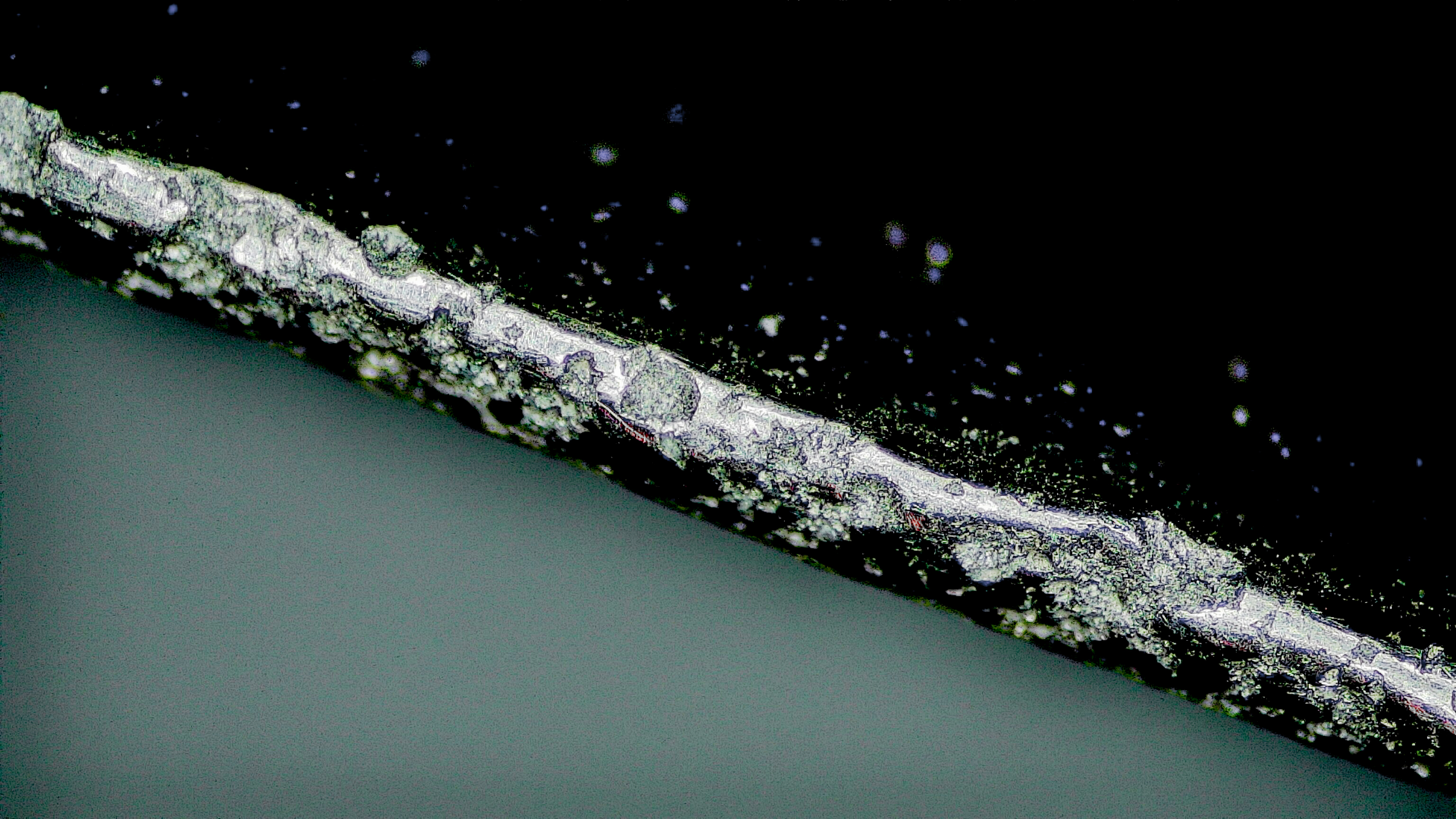
Die Inspektion ist jedoch nur die eine Seite der Medaille. Mit endoskopischen Robotern sollen künftig sogar Reparaturen an schwer zugänglichen Stellen durchgeführt werden. Ein besonders komplexes Problem haben sich die Forschenden bereits vorgenommen: das robotergestützte autonome Profilieren von Kompressorschaufeln im Triebwerk. Das Grundproblem ist schnell erklärt. Ein Flugzeugtriebwerk ist in Stufen aufgebaut. Vorne sichtbar ist lediglich der Fan mit seinen großen Schaufeln. Dahinter jedoch folgen in mehreren Reihen zahlreiche Kompressor- und Turbinenstufen mit vielen kleinen Rotorblättern (drehend) und Statorblättern (fest), die den Luftstrom führen. Diese oft nur wenige Zentimeter langen Blades sind im Flug immensen Belastungen ausgesetzt: Sie ertragen Druck- und Zugkräfte, extreme Temperaturschwankungen und drehen sich teilweise mit Überschallgeschwindigkeit. Bei solchen Geschwindigkeiten wirken auftreffende Sand- und Staubpartikel wie winzige Meteoriten, die auf das Material einprasseln. Selbst Wassertropfen hinterlassen Spuren.
Besonders problematisch ist das für die erste Reihe der Hochdruckkompressor-Blades. Sie bekommen am meisten ab und sind doch entscheidend für die effiziente Arbeit des Triebwerks. „Man kann sich diese Blades wie Küchenmesser vorstellen“, erläutert DLR-Wissenschaftler Fabian Wieczorek. „Wenn sie stumpf sind, schneiden sie nicht mehr sauber durch die Luft.“ Das Ergebnis ist ein um etwa 0,1 Prozent erhöhter Kerosinverbrauch. Das klingt nicht nach viel, macht aber bei einem einzigen Langstreckenflug, bei dem 200 Tonnen Kerosin verbraucht werden, einen Extrabedarf von rund 200 Kilogramm aus. Dazu kommen noch einmal einige Extraliter Kerosin, um die 200 Kilogramm transportieren zu können. Denn jedes Zusatzgewicht bedeutet in der Luftfahrt mehr Treibstoffverbrauch.
Wenn stumpfe Kompressorblades so schlecht sind, was liegt da näher, als sie zu schärfen? Dafür jedoch muss bislang das ganze Triebwerk auseinandergebaut werden. Eine Mammutaufgabe, die viele Arbeitsstunden und viel Geld kostet und daher oft nur im Rahmen der turnusmäßigen Serviceintervalle durchgeführt wird.
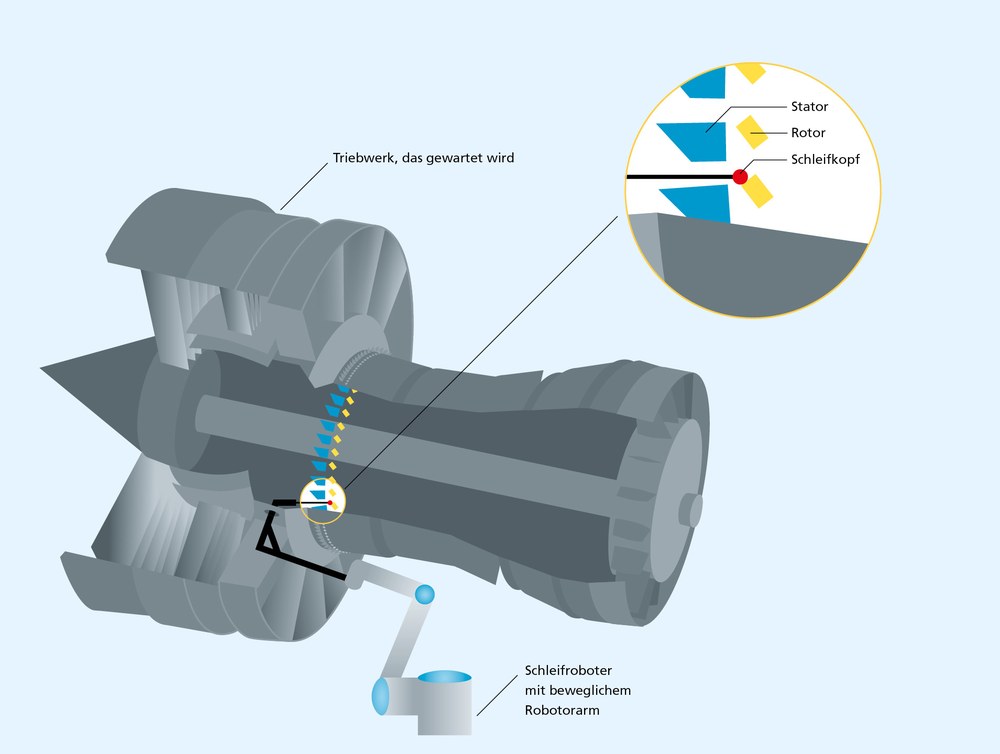
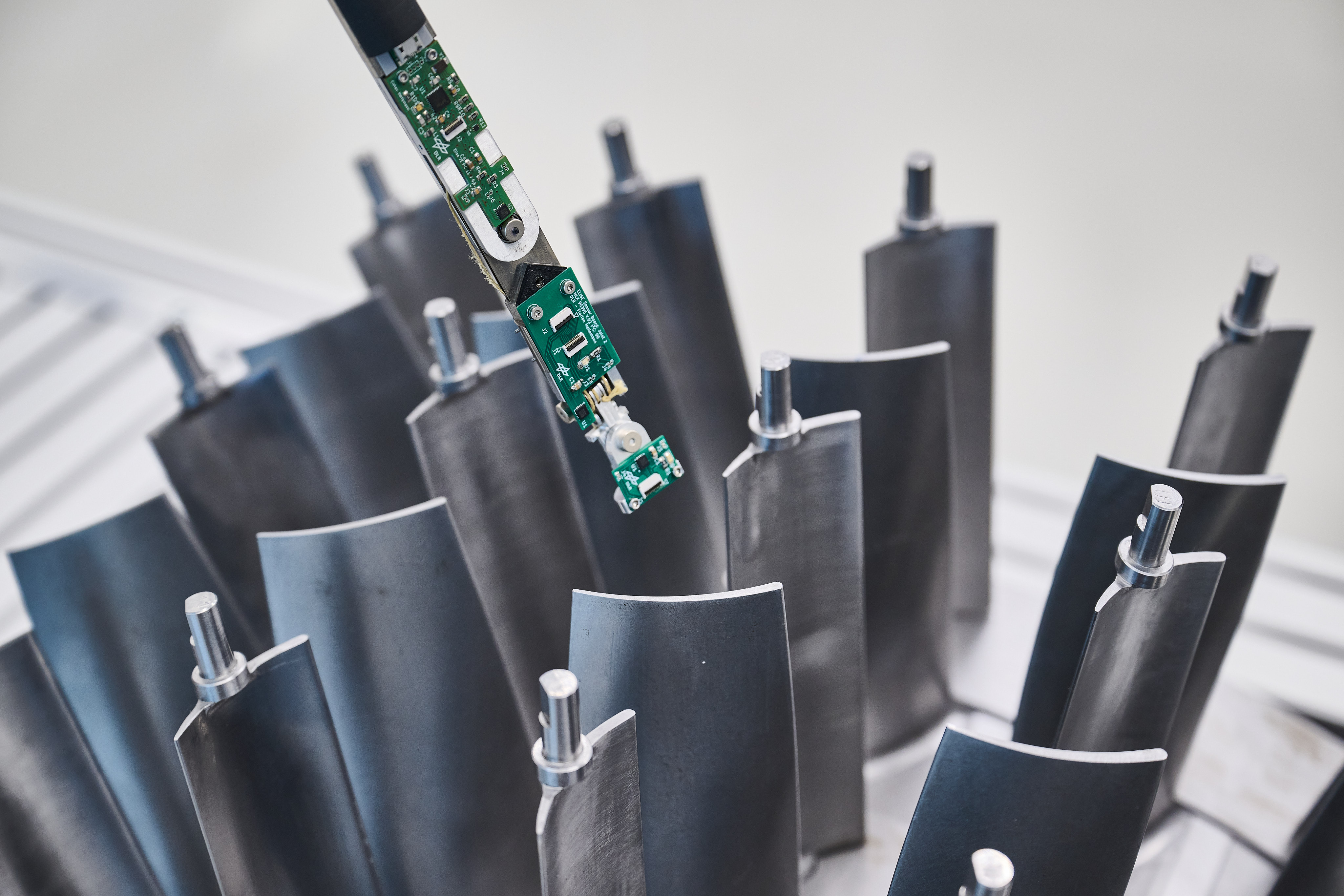
Im LuFo-Projekt GreenMES (für Green Mobile Engine Services) arbeitet das DLR gemeinsam mit Lufthansa Technik, dem Institut für Flugzeug-Produktionstechnik der Technischen Universität Hamburg sowie der Firma IT Concepts daran, die Blades der ersten Hochdruckkompressorstufe automatisch mittels eines Roboters scharf zu schleifen, ohne dabei das Triebwerk auseinanderbauen zu müssen. Die erste Kompressorstufe hat mehr als 30 Rotorblätter. Etwas zugespitzt formuliert versucht man also, 30 sehr teure Messer direkt im Küchenschrank von einer Maschine schärfen zu lassen, ohne dabei den Schrank weiter als ein paar Zentimeter zu öffnen und ohne hinzusehen.
Und das soll so funktionieren: Zunächst führt ein Roboterarm einen Werkzeugträger mit einer 3D-Kamera in die Instandhaltungsöffnung des Triebwerks ein. Das gelingt nur, wenn er eine genau berechnete Kurvenbewegung ausführt. Der Roboterkopf manövriert durch eine schmale Öffnung zwischen einigen festen Leitschaufeln hindurch und erreicht das erste Rotorblatt. Dieses wird nun dreidimensional vermessen – es entsteht ein hochauflösendes 3D-Modell. Das besondere Augenmerk liegt auf der Vorderkante des Blades. Hier lassen sich winzige Krater erkennen: die Folge von Partikeln, die mit Überschallgeschwindigkeit auf das Metall geprallt sind. Dann ist chirurgische Präzision gefragt: Der Roboter nutzt nun ein Schleifwerkzeug, um das Blade mit genau geplanten, aber minimalen Bewegungen des Roboterarms abzuschleifen. DLR-Forscher Wieczorek programmiert für diesen Ablauf eine Software, die Überwachung und Steuerung des Schleifprozesses erlaubt und ein funktionales Nutzer-Interface besitzt. Der Vorgang von Schleifen und visueller Kontrolle soll mehrmals abwechselnd wiederholt werden, bis das Nennprofil wiederhergestellt ist.
Kompressorschaufel unter dem Mikroskop
Unter dem Mikroskop erkennt man, was Staub und Wasser mit der Kompressorschaufel gemacht haben.
Dafür ist eine genaue Bewegungsplanung des Roboters entscheidend, denn die Vorderkante hat einen Radius von nur 0,3 Millimetern. Das erklärt auch, warum für den Werkzeugträger eine sehr starre Konstruktion ohne Gelenke gewählt wurde: Die geforderte Präzision wäre sonst unmöglich zu erreichen. Entscheidend ist dabei die sogenannte Wiederholgenauigkeit: Der Roboter muss nicht exakt wissen, wo er ist, er muss nur exakt die Position mit dem Werkzeug anfahren, die er zuvor mit der Kamera gesehen hat.
Das macht deutlich: Nur wenn die Entwicklung von Hard- und Software Hand in Hand geht, können Roboter ihr Potenzial entfalten und die Instandhaltungsprozesse vereinfachen. In einem Umfeld wie der MRO, in dem für hochpräzise Messungen, korrigierende Eingriffe und Ergebnisdokumentation oft nur kleine Zugangsöffnungen zur Verfügung stehen, spielt die endoskopische Robotik ihre Stärken aus und hat das Potenzial, die MRO-Branche nachhaltig zu verändern.
Ein Beitrag von Philipp Czogalla aus dem DLRmagazin 180.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}