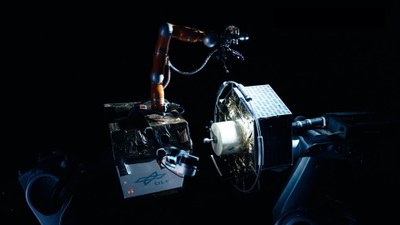
Diese Seite gibt eine Übersicht einiger am Institut für Robotik und Mechatronik entwickelten Roboter und robotischer Systeme.
Wechselseitiger Technologietransfer zwischen terrestrischen und raumfahrtbezogenen Anwendungen ist unsere besondere Stärke.