Landing on Ryugu – a surface with a view of boulders
August 14, 2018 | Interview with Ralf Jaumann, DLR planetary researcher and Principal Investigator of the MASCOT lander
Landing on Ryugu – a surface with a view of boulders
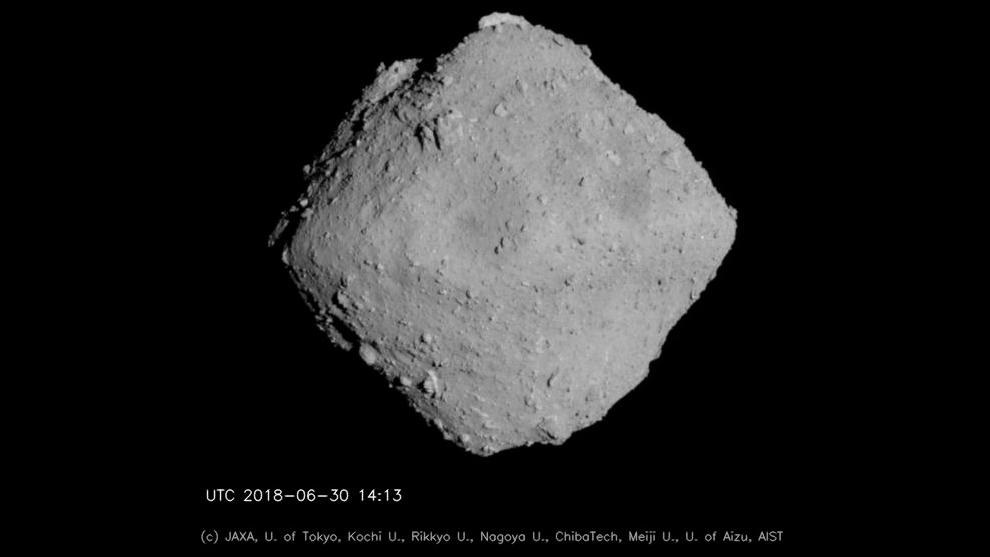
Asteroid Ryugu
Asteroid Ryugu, photographed on 30 June 2018, from Hayabusa2’s home position, 20 kilometres from the surface, with the Japanese Optical Navigation Camera – Telescopic (ONC-T).
Image: 1/3, Credit:
JAXA, University of Tokyo, Kochi University, Rikkyo University, Nagoya University, Chiba Institute of Technology, Meiji University, University of Aizu and AIST. .
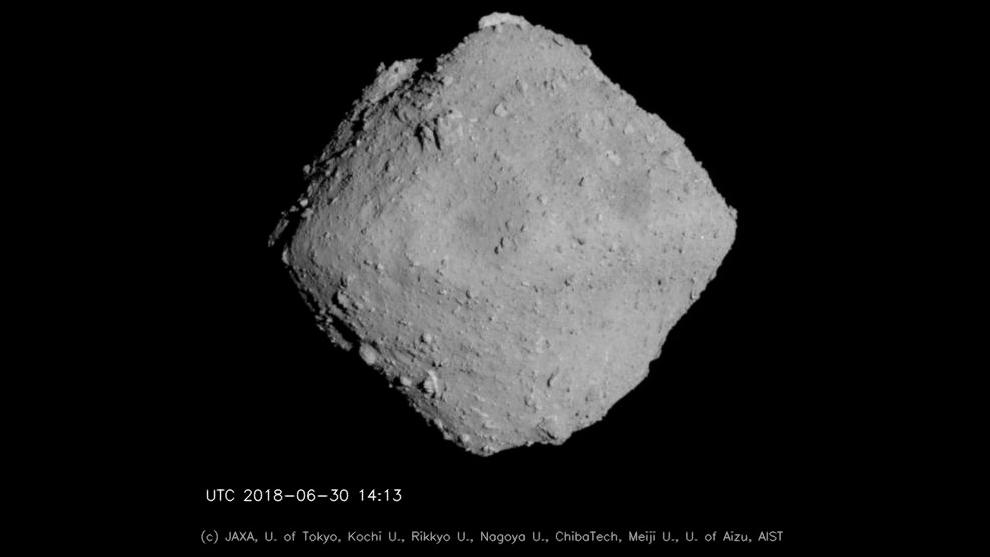
The image was acquired with the Optical Navigation Camera - Telescopic (ONC-T) of the Japanese Hayabusa2 probe.
Image: 2/3, Credit:
JAXA, Tokyo Universität, Kochi Universität, Rikkyo Universität, Nagoya Universität, Chiba Institut für Technologie, Meiji Universität, Aizu Universität, AIST.
In early October 2018, the Mobile Asteroid Surface Scout (MASCOT) lander is expected to be in operation for approximately 16 hours on the Ryugu asteroid. The selection of the landing site will take place this August. The ideal site must firstly offer the MASCOT team engineers excellent conditions for a safe landing and stable operation on the asteroid, while providing the researchers with a wealth of new and productive measurements. The lander made its way to the asteroid on board the Japanese Hayabusa2 space probe, carrying four instruments that will examine the celestial body directly on the surface. The German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt, DLR) is contributing the MASCOT Camera (MasCam), which will acquire the first images during the descent to the asteroid and is intended to investigate the area around the landing site, in addition to the fine structure of the surface. DLR is also providing the MARA radiometer, which will measure the temperature on the asteroid's surface, among other things. The Technical University of Braunschweig will use the MasMag magnetometer to research the magnetisation of the asteroid, while the French space agency CNES (Centre National d'Etudes Spatiales) will analyse the minerals and rocks on Ryugu using the MicrOmega spectrometer. Ralf Jaumann from the DLR Institute of Planetary Research is supervising the MasCam camera experiment and is the Principal Investigator of the MASCOT lander. In this interview, he explains what a suitable landing site may look like and what the scientists expect to find on the asteroid.
This interview was conducted by Manuela Braun.
On 3 December 2014, the Japanese space probe Hayabusa2 embarked on a sample return mission to asteroid (162173) Ryugu (formerly designated 1999 JU3). On board is the Mobile Asteroid Surface Scout (MASCOT), a lander built by the German Aerospace Center (Deutsches Zentrum für Luft-und Raumfahrt; DLR) in collaboration with the French space agency CNES. The aim of the Hayabusa2 mission is to learn more about the origin and evolution of the Solar System. As asteroids account for some of the most primordial celestial bodies, researching them gives us a glimpse into our cosmic past. Furthermore, Ryugu is a near-Earth asteroid, which means it could pose a threat to Earth and must be investigated in order to reduce this threat.
Animation: Asteroidlander MASCOT on board Hayabusa2
Your consent to the storage of data ('cookies') is required for the playback of this video on Youtube.com. You can view and change your current data storage settings at any time under privacy.
Animation: Asteroidlander MASCOT on board Hayabusa2
On 3 December 2014, the Japanese space probe Hayabusa2 embarked on a sample return mission to asteroid (162173) Ryugu (formerly designated 1999 JU3). On board is the Mobile Asteroid Surface Scout (MASCOT), a lander built by the German Aerospace Center (Deutsches Zentrum für Luft-und Raumfahrt; DLR) in collaboration with the French space agency CNES. The aim of the Hayabusa2 mission is to learn more about the origin and evolution of the Solar System. As asteroids account for some of the most primordial celestial bodies, researching them gives us a glimpse into our cosmic past. Furthermore, Ryugu is a near-Earth asteroid, which means it could pose a threat to Earth and must be investigated in order to reduce this threat.
Credit:
DLR
The first images of the asteroid Ryugu from just one kilometre away are available. Are you happy with the object of your research?
In all honesty, I have seen lots of asteroids before, but nothing quite like this. The many large boulders on the surface are extremely interesting! This is something that has never been seen. The Itokawa asteroid that was visited by the first Hayabusa mission also features boulders, but not as large or as homogenously distributed. Ryugu also has more impact craters than other small asteroids. All these craters are already degraded, even though some of them appear to be rather recent. A conventional impact crater has steep walls and a sharp-edged rim. The craters on Ryugu, however, have slightly rounded rims, meaning something occurred after the impact. This may be due to the fact that the material in the interior is not very strong. Or that it really wobbles when suffering an impact. We call this 'seismic shaking'.
But what is really impressive are the numerous, very large boulders on the surface. This material appears to be much stronger than the fine material that we see. I am really looking forward to the lander being on the surface and being able to view such a boulder up close.
If you could choose the perfect landing site for MASCOT, what would be the most exciting spot on the asteroid for you?
I think all the sites are exciting. According to our previous estimates, Ryugu looks extremely homogenous – both in terms of the distribution of large boulders and that of fine material. We would probably obtain suitable and interesting results everywhere. When selecting the landing site, safety will therefore be the dominant criterion. In terms of the camera aboard MASCOT, we aim to land where there is new material. All these bodies are affected not only by radiation, but also by solar wind particles and interplanetary dust, which cause microscopic destruction on the surface. After a while, a change process therefore occurs that resembles what we call weathering on Earth. But with each meteorite impact, fresh material comes to the surface.
Do the four on-board instruments have different requirements of the landing site?
Yes and no. There is general consensus, but each instrument also has individual expectations, of course. MARA basically measures the thermal properties of the surface, and the team is interested in seeing as much fine material as possible. The magnetometer is highly flexible, but it requires long measuring times and is therefore constantly switched on. Of course, we would like to use the spectrometer to measure an area where we might find volatile substances, such as water and organic matter. Based on the information we have, pinpointing where we might find this is not easy. The camera primarily aims to view fresh material.
These requirements still have to be discussed with the Hayabusa2 team, of course. MASCOT is not allowed to go to places where the Japanese spacecraft team wants to take samples. In addition, the spatial distance between the three sampling points and MASCOT should neither be too small nor too large.
What are you expecting from your work with the camera?
The asteroid is certainly extremely interesting and I am looking forward to the camera being on the surface, looking from MASCOT's feet to the horizon, as it were. From the surface, MASCOT will have several large surface boulders in its sights. And when we can see these not from above, but from the side. Geologists generally prefer to have a steep wall, where they can see the rock strata, which is why I think these boulders are quite exciting for us, with their structure, cracks and fissures.
I am interested in several questions: Where did these boulders come from? And are they fixed in the ground or simply lying on the surface? Were they created internally or are they fragments? – Ryugu used to be bigger. How are the boulders structured? From what I have seen of the surface so far, it does not matter where MASCOT lands. The camera will always have a view of a boulder and part of the horizon, as well as fine material.
The MARA radiometer, for example, will determine whether the temperature of the boulders is different to that of their surroundings. We know that the heat capacity of fine-grain material is different to that of solid material. So measurements from the camera and MARA will subsequently enable us to determine the strength of these boulders. We will also examine the fracture structures within the rock, from which we can derive the stress to which the rock has been exposed, and maybe even impact velocities.
The plan is not for MASCOT to take measurements at just a single site on the asteroid surface, but also to hop to one or two other locations. For the first time, measurements will be taken in several places on an asteroid. How does this benefit planetary researchers?
If it hops around, then we will see more, and the more boulders we see, the better we can evaluate their consistency and assess their origins. From what I know so far, there will not be any major differences between the two measurement sites – but who knows. We are not there yet and some potential landing sites look like they have both recent and old material. With a little luck, we will land right on the edge and hop from one to the other. We can but dream!
Once the measurements have been taken, the scientists will still have to be patient because the data will first be stored on the Japanese Hayabusa2 probe. The data will only reach Earth after the probe has completed its complex manoeuvres and is in a favourable position for transmitting the data. When will you know that the instruments have conducted measurements on the asteroid?
The housekeeping data – that is information about the camera operation – will soon tell us whether the camera has switched itself on and taken any photographs, and if so how many. But it remains to be seen what the data will look like. On the one hand, this depends on the temperature. With high temperatures, thermal radiation generates noise – and the images are a little blurred. But we will be measuring not only during the asteroid night as well as during the asteroid day. Our job will then be to create optimal images from the various measurements. On the other hand, MASCOT may be somewhere where there is no light. Ryugu has no atmosphere and thus no scattered light – the shadow of a boulder is therefore in complete darkness, so LEDs are used to illuminate the area. I am very confident that we will get good shots.
I guess we will receive the data via the Hayabusa2 probe approximately one week after the landing. The processing and evaluation will begin then. We have to map the boulders and measure their fractures before we scientists embark upon our lengthy discussions.
What are your scientific expectations of the mission?
A better understanding of where asteroids come from. A better understanding of when and how such an asteroid was created. And a better understanding of its internal structure. That is the scientific element. But Ryugu is also a near-Earth asteroid, meaning a body that traverses Earth's orbit. We obviously want to know the composition of such bodies in case it is necessary to take countermeasures in the event that such an asteroid were to approach Earth. Normally, we can detect bodies on a collision course with Earth relatively early. We could then take various countermeasures: we could push it away, deflect it or reduce its rotational speed, so that the Sun warms it more from one side – all measures to steer it past Earth. But to do this, we have to know the asteroid’s structure, how porous or how solid it is, and how the surface rock absorbs heat. These are all factors that we are measuring with the Hayabusa2 mission and MASCOT.
About the Hayabusa2 mission and MASCOT
Hayabusa2 is a Japanese space agency (Japan Aerospace Exploration Agency; JAXA) mission to the near-Earth asteroid Ryugu. The German-French lander MASCOT on board Hayabusa2 was developed by the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) and built in close cooperation with the CoRoT Special(Centre National d'Etudes Spatiales). DLR, the Institut d'Astrophysique Spatiale and the Technical University of Braunschweig have contributed the scientific experiments on board MASCOT. The MASCOT lander and its experiments are operated and controlled by DLR with support from CNES and in constant interaction with the Hayabusa2 team.


{kind=link}
{kind=link}
{kind=link}
