DLR-Technologie für den Roboter-Einsatz am Operationstisch



{kind=link}
{kind=link}
{kind=link}
Internationales Medizintechnik-Unternehmen kauft Lizenz zur kommerziellen Nutzung
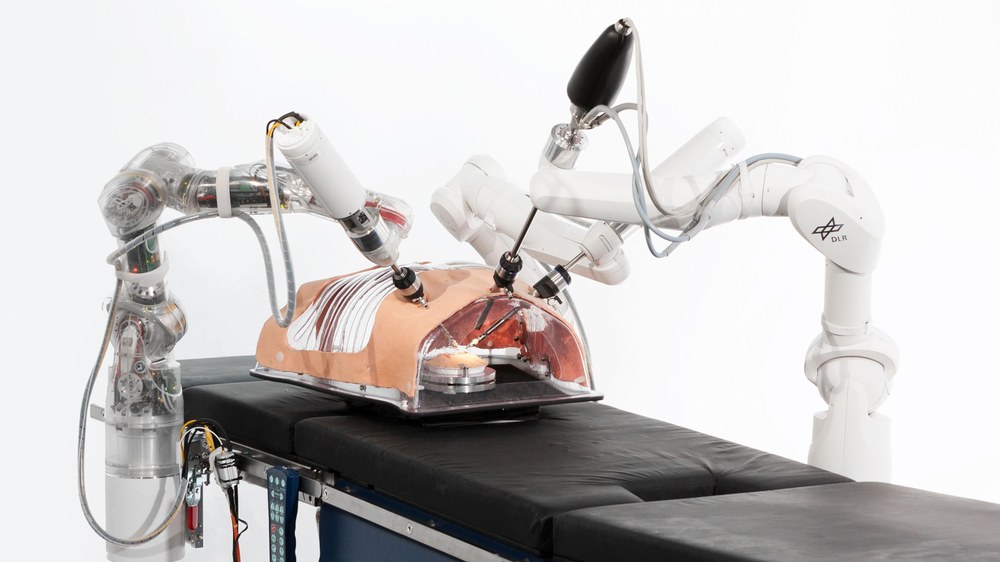
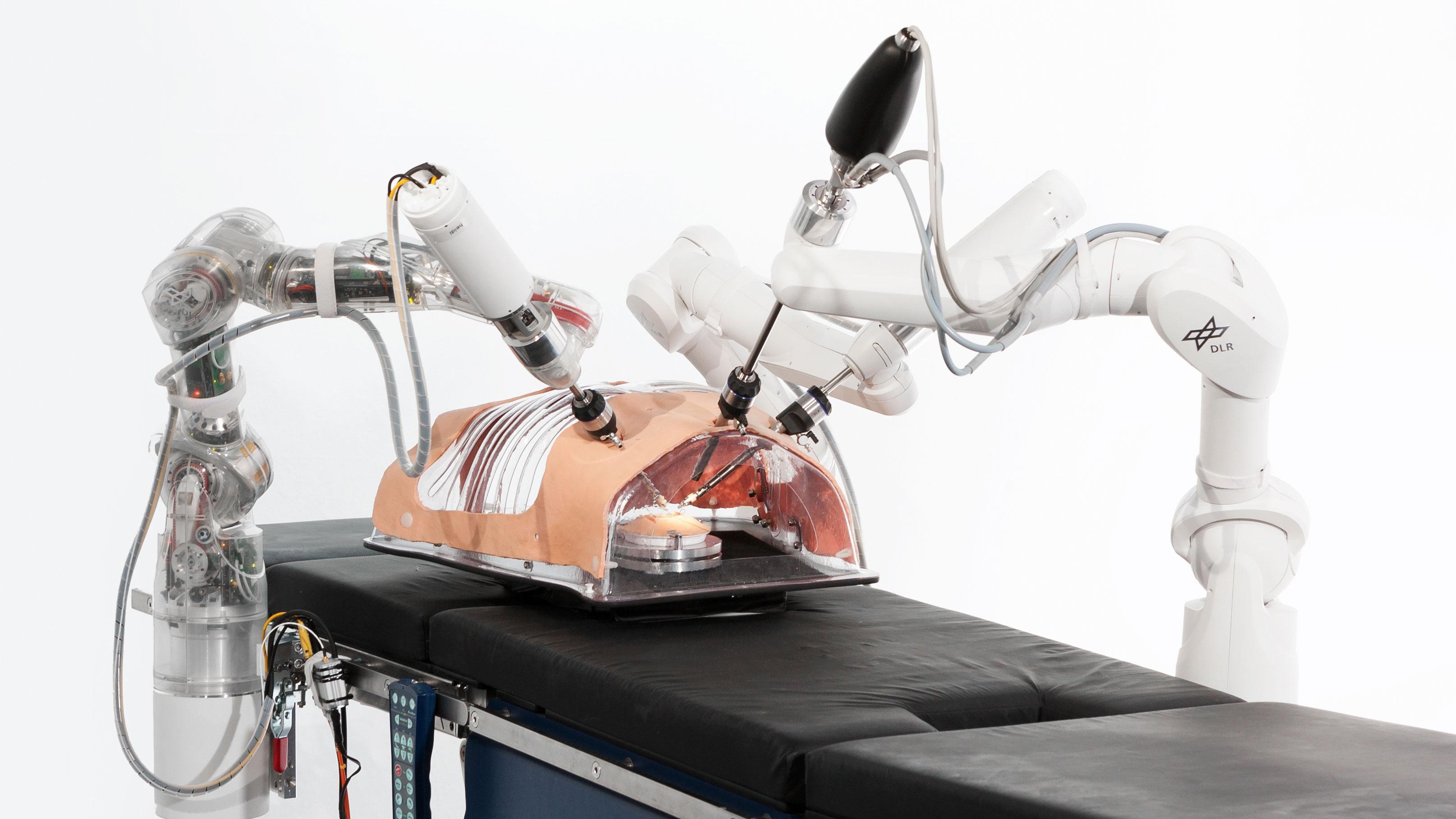
Der Chirurg sitzt an der Konsole, und Roboterarme setzen seine Kommandos mit höchster Präzision am Patienten um - führen exakte Schnitte aus, setzen Schrauben oder vernähen auf kleinstem Raum durchtrennte Adern. Dabei spürt der Arzt über seine Steuerung genau, was die Instrumentenspitzen am Roboter ausführen, so als ob er sie selbst in den Händen halten würde. Roboter und Mensch arbeiten gemeinsam Hand in Hand zusammen. "Unser Roboter MIRO erleichtert dem Chirurgen die Arbeit, indem er zum Beispiel leichte Ungenauigkeiten der menschlichen Handbewegungen herausfiltert oder Bewegungen des Chirurgen in verkleinertem Maßstab hoch präzise ausführt und so Operationen optimiert", betont Prof. Alin Albu-Schäffer vom Deutschen Zentrum für Luft- und Raumfahrt (DLR). Die Lizenz für den vom DLR entwickelten Medizinroboter MIRO ® wurde nun an das amerikanische Unternehmen Medtronic verkauft, das weltweit größte Medizintechnik-Unternehmen, das Technologien des DLR-Robotersystems für einen Medizinroboter weiterentwickeln und in den nächsten Jahren auf den Markt bringen möchte. Mit diesem Roboter will das Unternehmen zunehmend von der invasiven zur minimal-invasiven Operationstechnik übergehen.
Präzise und mit Gefühl
Der Roboterarm MIRO ist dabei ein Leichtgewicht, das wie Roboter "Space Justin" des DLR über flexible Gelenke und Feingefühl verfügt. Zahlreiche Sensoren im Inneren sorgen dafür, dass alle Kontakte des Roboterarms mit der Umgebung in Echtzeit an das Eingabegerät des Operators zurückgemeldet werden. Bei minimal-invasiven Operationen - dabei muss der Arzt über möglichst kleine Schnitte lange Instrumentzangen an den "Einsatzort" im menschlichen Körper führen - unterstützt die Technologie von Roboter MIRO den Chirurgen: Der Arzt führt die Operation an einer Konsole aus, sieht währenddessen über einen Bildschirm die Endoskop-Aufnahmen in 3D und steuert gefühlt die Spitzen seines Werkzeuges - und nicht die umständlichen, aber notwendigen Verlängerungen der Instrumente. Für den Chirurgen bedeutet dies ein intuitiveres und gefühlt direkteres Operieren. "Dadurch kann auch gezielter schädliches Gewebe entfernt werden und gesundes Gewebe unbeschädigt bleiben."
Weltraumtechnologie für die Medizin
Die Grundlagen für den Medizinroboter stammen dabei aus der Raumfahrt: Dort arbeiten die Ingenieure des DLR-Instituts für Robotik und Mechatronik erfolgreich daran, Roboter ferngesteuert von der Erde oder von der Internationalen Raumstation ISS aus zu betreiben und dem Bediener das Gefühl zu vermitteln, vor Ort - also telepräsent - zu sein. So konnte ein Kosmonaut von der ISS aus mit dem Kontur-2: Robotersteuerung aus der Schwerelosigkeit des DLR im August 2015 erstmals einen Roboterarm am Boden bewegen und im All spüren, ob dieser beispielsweise gegen einen Widerstand stößt. "Unser Institut forscht seit vielen Jahren im Bereich der Telepräsenz", sagt DLR-Institutsleiter Prof. Alin Albu-Schäffer. Diese Erfahrungen wurden nun auch im Medizinroboter MIRO eingesetzt. "In der Medizin kommt es dabei allerdings nicht auf die große Entfernung zwischen Roboter und Bediener an, sondern darauf, die Barriere des menschlichen Körpers zu überwinden - die Operationsstelle ist nämlich oft nur schwer erreichbar beim Eingriff, dennoch müssen filigrane Bewegungen sehr genau ausgeführt werden."
Immer wieder setzten die Ingenieure des DLR erfahrene Chirurgen an ihre Konsole, um an Silikon-Kunstherzen und Kunststoffgewebe mit dem Medizinroboter typische Operationsaufgaben zu testen. Wirbelsäulen-Spezialisten stellten MIRO bei Reparaturen von Wirbeln auf die Probe oder setzen kleine Schrauben in Knochenmaterial. Mit diesen Praxistests näherten sich die Ingenieure so immer mehr den Anforderungen der Nutzer an. Die MIRO-Technologie wird nun als Grundlage für ein marktreifes Produkt vom Lizenznehmer Medtronic in einem bayerischen Entwicklungszentrum angepasst und auf spezielle Anwendungen ausgerichtet. So profitiert der Standort Deutschland weiterhin unmittelbar von dieser Entwicklung.
Ideen für die Medizinrobotik der Zukunft
Gefördert wurde das Projekt unter anderem über den Helmholtz Validierungsfond, mit dem die Lücke zwischen wissenschaftlichen Erkenntnissen auf der einen Seite und den Anforderungen von Unternehmen an wirtschaftlich verwertbare Forschungsergebnisse auf der anderen Seite geschlossen werden soll. "Mit MIRO konnten wir ein großes Forschungsprojekt so entwickeln, dass es über einen Lizenznehmer zur Markteinführung kommt und somit aus der Forschung in die kommerzielle Nutzung zum Wohl der Patienten transportiert wird", betont Dr. Rolf-Dieter Fischer vom DLR-Technologiemarketing, dass diesen Prozess begleitet und die Entwicklung ko-finanziert hat.
Mit der Vergabe der Lizenz enden die Forschungsarbeiten in der Medizinrobotik im DLR allerdings nicht. Die Ingenieure des DLR-Instituts für Robotik und Mechatronik haben bereits weitere Ideen, wie der Roboter den Menschen unterstützen kann: "Wir entwickeln im MIRO Innovation-Lab weitere Anwendungen, sowie Softwarekonzepte, die dem Roboter eine größere Autonomie ermöglichen", erläutert DLR-Institutsleiter Prof. Alin Albu-Schäffer. Dann könnte ein Roboterarm in der Zukunft auf Kommando des Chirurgen bestimmte Arbeitsschritte teilautonom durchführen, also beispielweise nicht nur hochpräzise Schnitte ausführen oder größere Gewebeflächen behandeln, sondern selbstständig für den Chirurgen auch feinfühlig und exakt Knoten beim Vernähen setzen.