Einmal rund um den Krater Jezero


FU Berlin, ESA, DLR
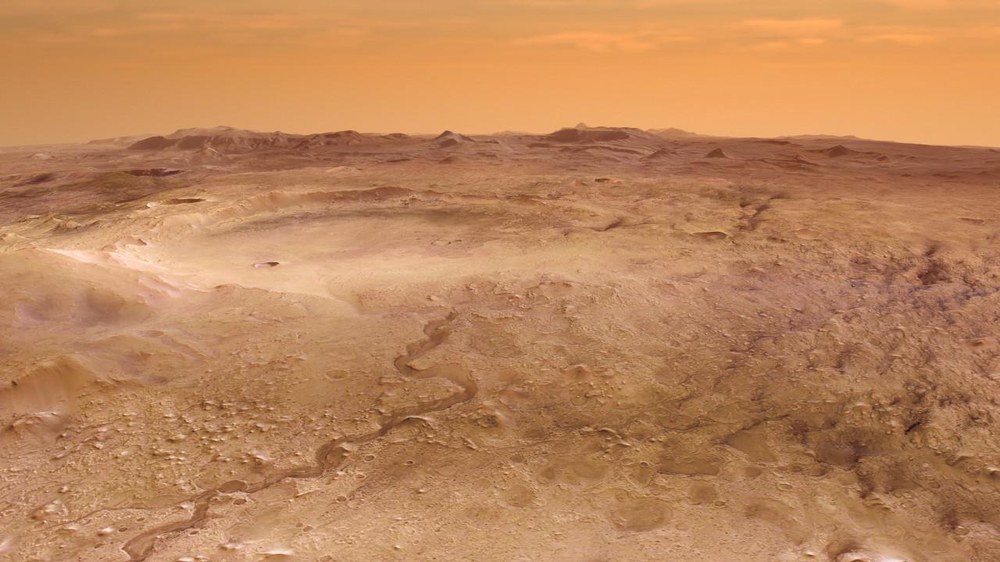
- Virtueller Flug über den Einschlagskrater Jezero und seine Umgebung, den Landeplatz des NASA-Rovers Perseverance.
- Basis: Beobachtungen der hochauflösenden DLR-Stereokamera (HRSC) an Bord der ESA-Mission Mars Express.
- Schwerpunkt: Raumfahrt
Ein virtueller Flug über den Einschlagskrater Jezero und seine Umgebung, den Landeplatz des NASA-Rovers Perseverance – der Film, den wir heute als Sonderveröffentlichung der Reihe „Marsbild des Monats“ vorstellen, wurde unter Verwendung eines Bildmosaiks aus mehreren Einzelaufnahmen erstellt. Basis hierfür waren Beobachtungen der hochauflösenden DLR-Stereokamera (HRSC) an Bord der ESA-Mission Mars Express. Die hochpräzisen digitalen Geländemodelle der HRSC haben einen wichtigen Beitrag zur Auswahl zahlreicher Landestellen auf dem Mars geleistet, darunter auch für die Landestelle der Mission Mars 2020 mit dem Rover Perseverance. Genaue topografische Informationen sind von entscheidender Bedeutung, um eine sichere Landung zu ermöglichen. Diese gelang am 18. Februar 2021 genau dort, wo es die NASA geplant hatte.
Animation: Virtueller Rundflug um den Jezero-Krater
Für die Wiedergabe dieses Videos auf Quickchannel.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
FU Berlin, ESA, DLR
Früherer Kratersee mit Zu- und Abflüssen
Der 48 Kilometer breite Krater Jezero liegt an der Grenze zwischen der alten Hochlandregion Terra Sabaea und dem ähnlich alten Einschlagbecken Isidis Planitia, dessen heutige Oberfläche vor allem deutlich jüngeren Ablagerungen bedeckt ist. Das nahegelegene Grabensystem Nili Fossae, das durch seine Krümmung in etwa die Form des Isidis-Beckenrandes nachzeichnet, wurde genau durch diesen Einschlag als Folge tektonischer Kräfte gebildet.
Südwestlich davon befindet sich die Vulkanregion Syrtis Major. Die dunklen, bläulich-schwarzen Flächen, die im Video in und um Jezero zu sehen sind, sind von einer Schicht alter Vulkanasche bedeckt. Diese wird vom Wind weiträumig verweht und türmt sich vielerorts zu beeindruckenden Dünenfeldern auf.
Jezeros Kraterrand wird von drei Tälern durchbrochen, durch die früher einmal Flüsse strömten. Neretva Vallis und Sava Vallis waren Zuflüsse, die jeweils ein Flussdelta am westlichen und nordwestlichen Rand des Kraters geschaffen haben. Diese Deltas gelten auch als Beweis für die Existenz eines ehemaligen Sees in Jezero. Die Ablagerungen der Flüsse in diesen deltaförmigen Sedimentfächern gaben den wissenschaftlichen Ausschlag, mit der Mission 2020 genau dieses Gebiet mit dem Rover Perseverance zu untersuchen. Auf der Erde sind Delta-Sedimentfächer häufig Orte, in denen Sedimente zu finden sind, die Lebensspuren besonders gut konservieren können. Das Hauptziel der Mission ist es, Spuren ehemaligen Lebens auf dem Mars zu identifizieren.
Das dritte Tal, Pliva Vallis, durchstößt den östlichen Kraterrand und war einst ein Kanal, durch den Wasser aus dem Krater abgeflossen ist. Aus diesem Grund wird dieser ehemalige Kratersee als „offener Beckensee“ bezeichnet.
Offene und geschlossene Kraterseen waren einst auf dem Mars sehr zahlreich. Im Vergleich zu geschlossenen Seen – mit Zufluss, aber ohne Abfluss – sind offene Kraterseen für die Wissenschaft interessant, weil es sich um Süßwasserseen mit einem stabilen Wasserspiegel handelte. Hingegen waren Seen in geschlossenen Becken häufigeren Austrocknungsperioden ausgesetzt, die sie zu Salzseen werden ließen. Auf der Suche nach lebensfreundlichen Bedingungen sind sie im Vergleich zu den offenen Kraterseen weniger vielversprechend.
Fusion aus Aufnahmen von HRSC und Context Camera
Das Bild der Marsoberfläche, das diesem Film zugrunde liegt, besteht aus einem fusionierten Datensatz von zwei verschiedenen Instrumenten. Eine „Kachel“ der HRSC Mars-Chart-Bildmosaike (HMC30, Kachel MC13E) wurde als Referenzdatensatz verwendet. Es liefert die geodätisch kontrollierte topografische Basis und ein nahtloses Basisbild für die gesamte Region. Darüber hinaus wurden 33 Einzelbilder der Context Camera (CTX) auf dem Mars Reconnaissance Orbiter mit einer Auflösung von bis zu fünf Metern pro Bildpunkt verwendet.
Die einzelnen CTX-Bilder wurden radiometrisch angeglichen, also störende Strahlungseinflüsse auf den eigentlichen Helligkeitswert der Millionen Bildpunkte herausgerechnet, wobei die HRSC MC13E-Kachel als Helligkeitsreferenz verwendet wurde. Die beiden Datensätze wurden anhand der HRSC-Farbkanäle mit Hilfe von sogenannten Pan-Sharpening-Techniken koloriert. Das dabei entstandene Mosaikbild wurde mit Topographieinformationen aus dem digitalen HRSC-Geländemodell der MC13E-Kachel kombiniert, um eine dreidimensionale Landschaft zu erzeugen.
Schließlich wurden für jede Sekunde des Films 50 Einzelbilder gerendert, die einem vordefinierten Kamerapfad in der Szene folgen. Für diese Animation wurde die Szene dreifach vertikal überhöht dargestellt, um Höhenunterschiede in dem weitläufigen Gelände besser herauszustellen. Atmosphärische Effekte – Wolken und Dunst in einer Entfernung von 200 Kilometern – wurden digital hinzugefügt, um die Grenzen des Szenenausschnittes zu verschleiern.
Die HMC30-Produkte bestehen jeweils aus digitalen Geländemodellen und unter Berücksichtigung von Ort, Höhe und Sensorinformationen geografisch referenzierten Schwarz-Weiß-Bildmosaiken, die aus HRSC-Einzelstreifen erstellt wurden. Außerdem liegt jede Kachel auch als farbiges Bildmosaik vor. Die HMC30-Datenprodukte sind nach einer modifizierten Version des USGS MC-30 Kachelschemas organisiert. Alle HMC30-Produkte beruhen auf einer Bündelblockausgleichung der Stereobilder und beziehen sich auf globale Lageinformationen des Mars Orbiter Laser Altimeter (MOLA).
Verwandte Links:
Das HRSC-Experiment auf Mars Express
Die High Resolution Stereo Camera wurde am Deutschen Zentrum für Luft- und Raumfahrt (DLR) entwickelt und in Kooperation mit industriellen Partnern gebaut (EADS Astrium, Lewicki Microelectronic GmbH und Jena-Optronik GmbH). Das Wissenschaftsteam unter Leitung des Principal Investigators (PI) Dr. Thomas Roatsch vom DLR-Institut für Planetenforschung besteht aus 50 Co-Investigatoren, die aus 34 Institutionen und zehn Nationen stammen. Die Kamera wird vom DLR-Institut für Planetenforschung in Berlin-Adlershof betrieben.
Diese Bilder in hoher Auflösung und weitere Bilder der HRSC finden Sie in der Mars Express-Bildergalerie auf flickr.